
在2024年伊始,回顾过去的一年,机器人大讲堂见证了机器人领域众多高校和科研机构的卓越表现和令人瞩目的成果。同时,我们深入报道了国内外机器人领域的前沿动态,一些成果不仅具有学术价值,而且对实际应用产生了深远影响。在此,我们精选了一些备受关注的热门文章,展现了机器人领域的进步和突破。正是科研工作者们的不懈探索,推动了机器人领域的持续进步。
1、传统刚性抓手输出力大、承载力强,但固有的高刚度使其难以操纵脆弱物品。而柔软的软抓手具有天然的顺应性,可以安全,便捷的操纵各种较脆弱物品。但一方面大多软抓手仍难以操纵水母、香灰、烟灰等非常脆弱的物品,另一方面软抓手的输出力和承载能力即便引入各种变刚度机制也仍十分有限。针对这两个问题,来自华中大的科研团队设计出两款具有优异抓取性能的刚柔耦合多指抓手,为极大拓宽机械抓手的抓取上下限分别提供了解决方案。两项研究均于近日发表于机器人领域顶级期刊《Soft Robotics》。相关方案可为后续高性能软机械的开发提供参考,而两款抓手在未来也有望被用于野外勘探、工业分拣、人机交互等多个场景。
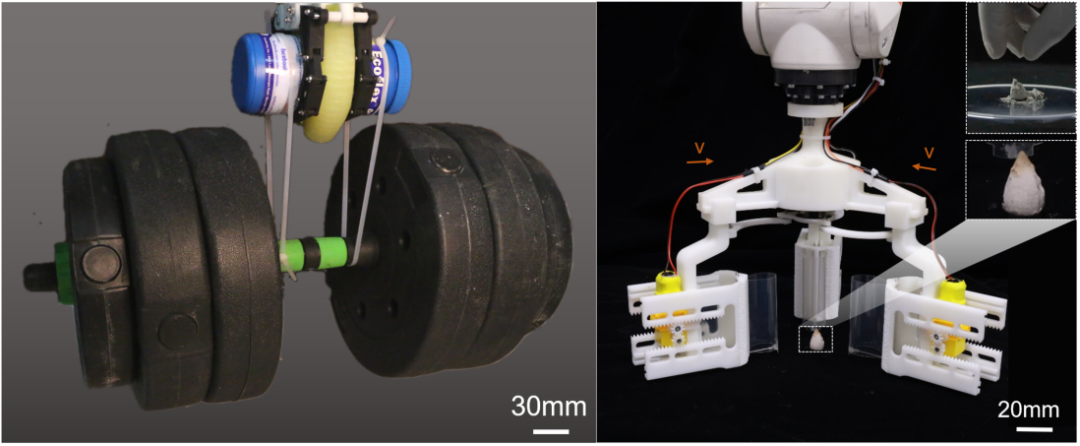
文章标题:上可稳提27kg哑铃,下可无损捏香灰、活抓金鱼,华中大刚柔耦合抓手展现超强性能!(←戳文章标题了解详情)
2、正如人们用手指触摸未知的物品,当具有多模态感知能力的机器人手摩擦未知物品时,机器人便能感知到物品的粗糙度;当机器人手隔空拂过位置物品时,它甚至能像X射线和3D扫描仪那样感知到物品的材质和形状。因此,能够感知环境的多模态传感与擅长交互的软体机器人的结合必然能擦出火花。《先进功能材料》(Advanced Functional Materials)报道了北京航空航天大学仿生软体机器人实验室在柔性传感器与软体机器人感知领域的最新研究。该项工作开发了一套智能软体机器人系统,该系统能够对物体的物理特性进行感知、描述和分类,可协助机器人解释物理世界、与物理世界进行交互,为人工智能与世界的交互提供了可能的接口。
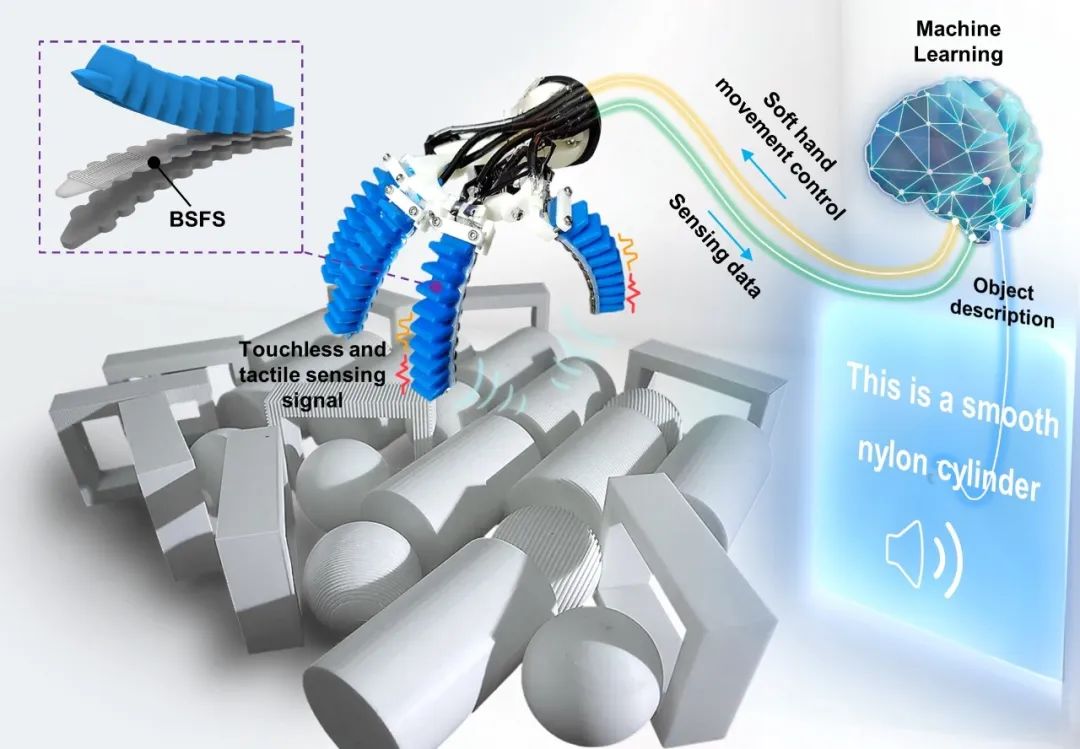 文章标题:多模态物理信息感知与描述!北航团队AFM发布软体机器人智能感知系统最新进展(←戳文章标题了解详情)
文章标题:多模态物理信息感知与描述!北航团队AFM发布软体机器人智能感知系统最新进展(←戳文章标题了解详情)
3、来自浙江大学控制科学与工程学院的长聘副教授高飞,在国际机器人旗舰会议IROS 2023发表的最新研究成果备受关注,在功能更强的新型无人机平台,性能更优的全状态轨迹规划、高速运动下的感知-规划闭环、超轻量化的集群协同自主导航等方面取得了一系列创新性的成果。在如下三个有代表性的成果中,NOKOV度量动作捕捉系统为研究提供了实时位姿采集与定位追踪等数据。
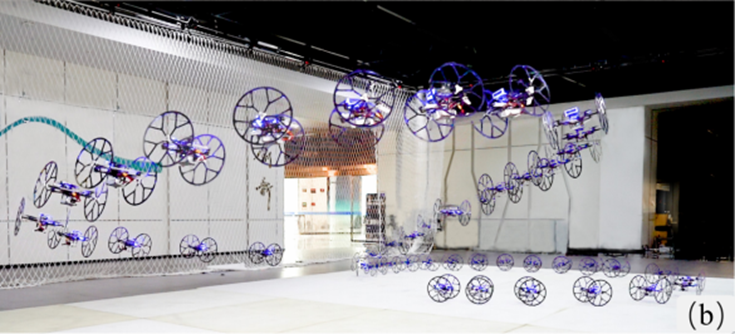 文章标题:浙大FAST-Lab高飞团队 IROS 2023公布研究新进展(←戳文章标题了解详情)
文章标题:浙大FAST-Lab高飞团队 IROS 2023公布研究新进展(←戳文章标题了解详情)
4、在人形机器人核心零部件领域,一些科研院校通过摸索,突破了电机、关节驱动“卡脖子”问题。北京理工大学团队早在2000年就开始了第一代“汇童”人形机器人的研发,经过23年的技术沉淀,历经了6代“汇童”人形机器人产品研发。北京理工华汇智能科技有限公司(以下简称“理工华汇”)是北京理工大学学科性公司,目前理工华汇“汇童”双足人形机器人在运动控制、导航、软件、电机、减速器等核心零部件已经实现了自主研发国产化,并且突破了高爆发一体化驱动、仿生控制、刚柔耦合系统集成等核心技术,可实现快速行走、单脚跳跃、双脚离地奔跑等一系列高难度运动。
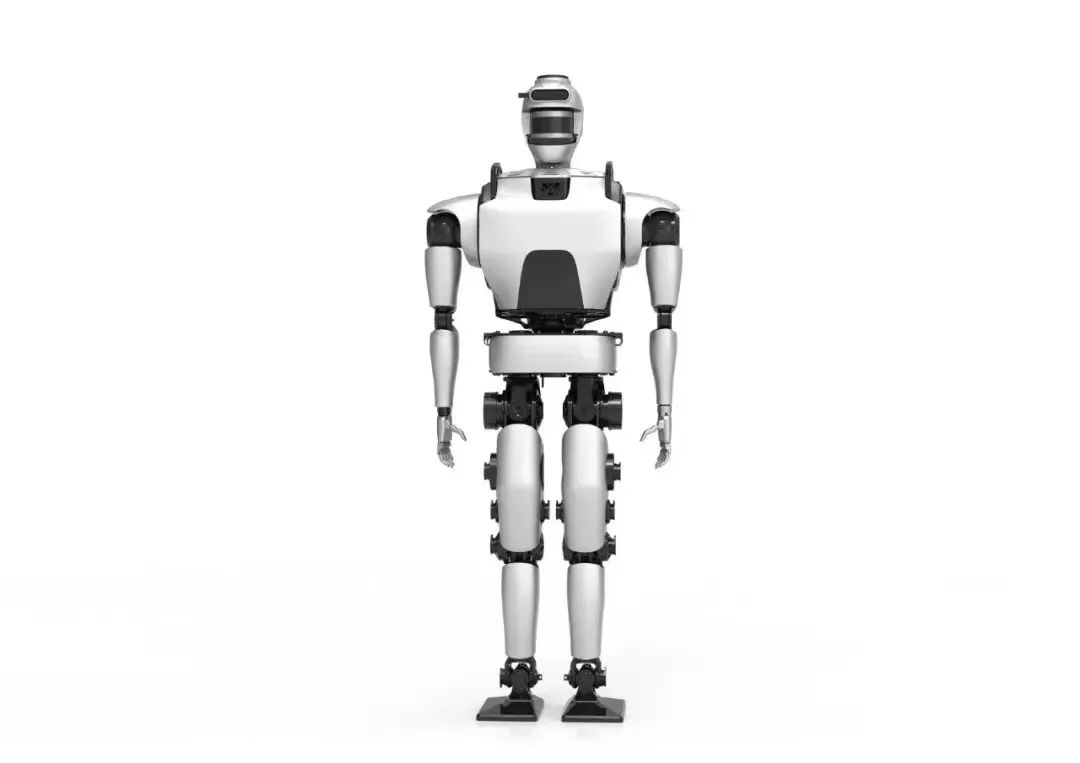 文章标题:北京理工华汇双足人形机器人产品跻身全球第一梯队(←戳文章标题了解详情)
文章标题:北京理工华汇双足人形机器人产品跻身全球第一梯队(←戳文章标题了解详情)
5、今年7月份,首例机器人辅助脊髓电极植入动物实验在北京取得成功,该实验由北京科技大学张建华教授团队、北京天坛医院何江弘主任团队联合完成。此次实验证明所研制的首款真正仿人双臂介入机器人可以完成脊髓电极植入手术流程,医生未受X射线辐射,手术效果良好,无不良事件,机器人辅助的脊髓电极植入手术优势显著,填补了国内脊髓电极植入机器人技术的空白。

文章标题:重磅!北科大张建华教授团队首创脊髓电极植入机器人,在北京顺利完成动物实验(←戳文章标题了解详情)
6、中山大学联合香港中文大学(深圳)的科研团队提出了一种方便又便宜的好方法来估计3D手势。他们先用视觉传感器捕捉操作员双手的位置和姿势。然后,双手运动信息会映射到仿生双臂机器人的运动上。在这个系统中,包括一种通过视觉的双手运动捕捉方法,该方法由DuHandLocaNet和3DHandPoseNet两个部分组成。DuHandLocaNet用于检测和定位双手的位置,并分辨左右手,这些信息可以映射到机器人的手上。而3DHandPoseNet可以从所捕捉到的人类手部的图片中估计双手的3D姿态,这些3D手势信息可以映射到五指灵巧机械手上。
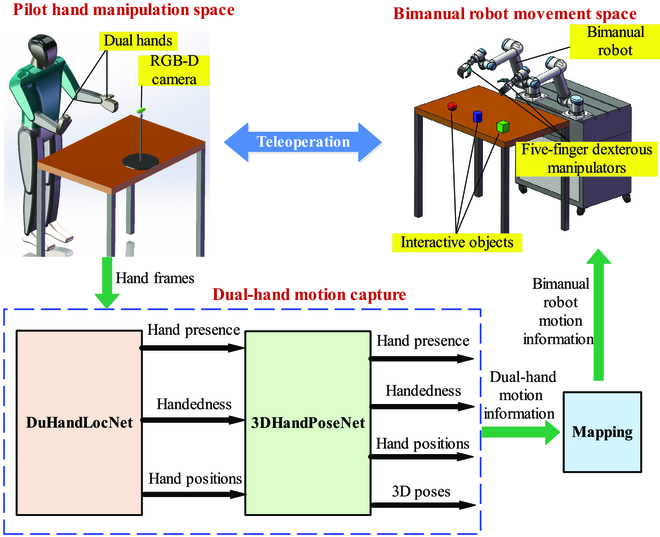
文章标题:方便又便宜!中山大学与港中深团队给机器人装上灵巧双手,远程精准复刻人类动作(←戳文章标题了解详情)
7、昆虫对扑动翅膀和身体姿势的控制相当灵活:在悬停时,它扑动翅膀产生向上的的升力,而身体姿势可以任意改变。尤其是在墙壁上降落或起飞时,需要完成一系列复杂的模块化动作,包括身体减速和身体大角度旋转。受到这一点的启发,南京航空航天大学的研究人员也将这种“大角度旋转”融入了仿生机器人中。这项研究发表在《Research》期刊中,标题为“An Aerial–Wall Robotic Insect That Can Land, Climb, and Take Off from Vertical Surfaces” (一种可以在垂直表面着陆、爬升和起飞的空中墙壁机器人昆虫)。
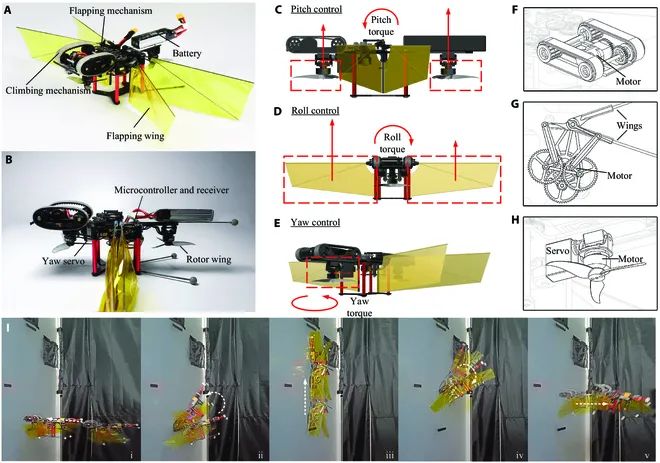
文章标题:南航机器昆虫最新飞行特技!在壁面上着落与起飞,无缝衔接超丝滑(←戳文章标题了解详情)
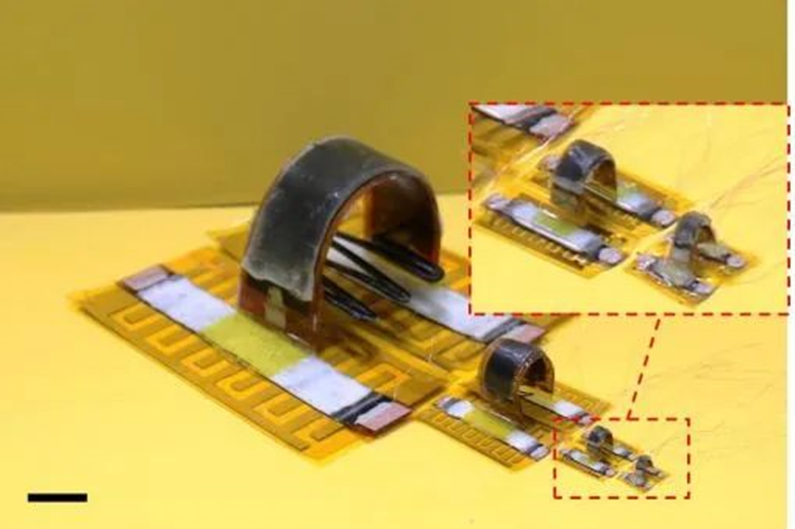
9、同济大学与马克斯普朗克智能系统研究所在《Nature Communications》(自然通讯)上合作发表了一项研究,他们开发的穿山甲机器人不钻地也不挖洞,而是进入人体内治病。这操作属实让人意想不到,其实关于这类“体内”微型机器人的研究也不在少数,它们被称为人体内的“外科医生”,为了避免对人体造成伤害,机器人的身体都是完全柔软的,而像“穿山甲”一样具有坚硬鳞片的机器人进入人体治病的还是头一个。
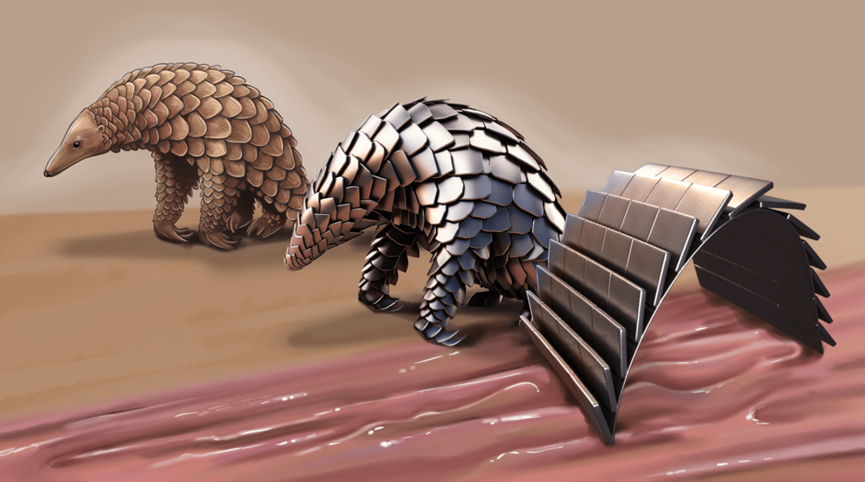
文章标题:穿山甲钻进胃里治病?同济大学&马普所联合开发微型机器人,登上 Nature子刊!(←戳文章标题了解详情)
9、清华大学航天航空学院张一慧教授课题组研发了一款机器人界的“攀爬冠军”,相关研究成果于近日在《PNAS》(美国科学院院)以《一种基于可变形三维驱动器的可在复杂表面攀爬和过渡的微型软体机器人》为题发表。该机器人具有可变形的身体和脚垫,以及连接二者的智能关节。它们均由液晶弹性体(LCEs)材料为基础制成。这是一种智能材料,在外界刺激下,例如热、光、电、磁、pH、湿度等,材料会发生宏观形变,撤去外界刺激后,又会恢复原状。机器人的脚垫还拥有一个额外的电胶层,提供攀爬运动所需的粘接力,同时可以主动变形来更好的适应不同形状的表面。
文章标题:清华微型软机器人可在多种地表攀爬,6到90毫米尺寸变化,还会翻跟头!(←戳文章标题了解详情)
10、如何寻找新换能原理的机械手驱动模式,如何设计更高效和更精密的传动机构,甚至完全摒弃传动机构已成为研制机械手的新焦点和新挑战。为此,哈工大机器人技术与系统国家重点实验室近期研发了一种四指压电机械手,如图1所示。该机械手的研发受到了人手“在手操控”的启发,主要用于解决传统机械手难以胜任的宏微跨尺度运动操控难题;该机械手不同于传统各类机械手,其核心在于以压电陶瓷的逆压电效应作为电能至机械能的转换原理,从而利用压电陶瓷在电场激励下产生的微观变形运动实现各类物体的宏微跨尺度运动操控。

文章标题:哈工大新型4指压电机械手,10余种手势可代替或辅助人手实现灵巧操控!(←戳文章标题了解详情)
11、危险环境中的探索和救援是机器人腿式运动的重要应用,用于灾害救援或野外探险的机器人往往被要求具有平坦道路上的快速移动能力和复杂地形的适应能力。基于此项难题,来自哈尔滨工业大学机电工程学院机器人与系统国家重点实验室的团队研发了一种高机动性、高适应性的液压动力自主轮腿机器人系统——WLR-3P机器人,这款机器人可以在平坦路面快速高效移动,在崎岖的地形环境中适应性也是杠杠的。该项研究以论文(Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot)为题发表于中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems中。

文章标题:哈工大的这款轮腿机器人出3.0版本了!揭秘其设计、控制和性能测试(←戳文章标题了解详情)
在此,机器人大讲堂特别感谢所有粉丝的关注和支持!新的一年,机器人大讲堂将一如既往地关注机器人、智能制造、人工智能等前沿领域发展,热忱欢迎国内外各大高校和科研机构学者、广大社会科学工作者积极投稿,鼓励前沿性、创新性、趣味性的来稿,共同推动机器人产业发展。(投稿请加堂博士微信:15611695072)最后祝机器人大讲堂的所有粉丝元旦快乐,新的一年身体健康,工作顺利!



