
动态运动操作(DLM)是指人形机器人在执行复杂或危险任务时,需展现出的同时协调行走(Locomotion)与操作(Manipulation)的能力。这类任务往往涉及对动态交互属性,如刚度、加速度和接触力的精细管理。
无论是在制造仓库中人类协调上下半身运动以将沉重箱子推入指定插槽,还是医护人员协同工作确保病床的服从性和安全性并将其引导至所需位置,都充分展现了动态运动操作(DLM)的核心价值和应用潜力。
人形机器人,凭借其与人类相似的形态和运动能力,天然地具有更好地适应人类工作环境的优势。但要真正成为有用且可靠的工具,它们必须能够执行类似人类的任务。赋予人形机器人以动态运动操作(DLM)能力,将显著提升其工作效率和安全性。
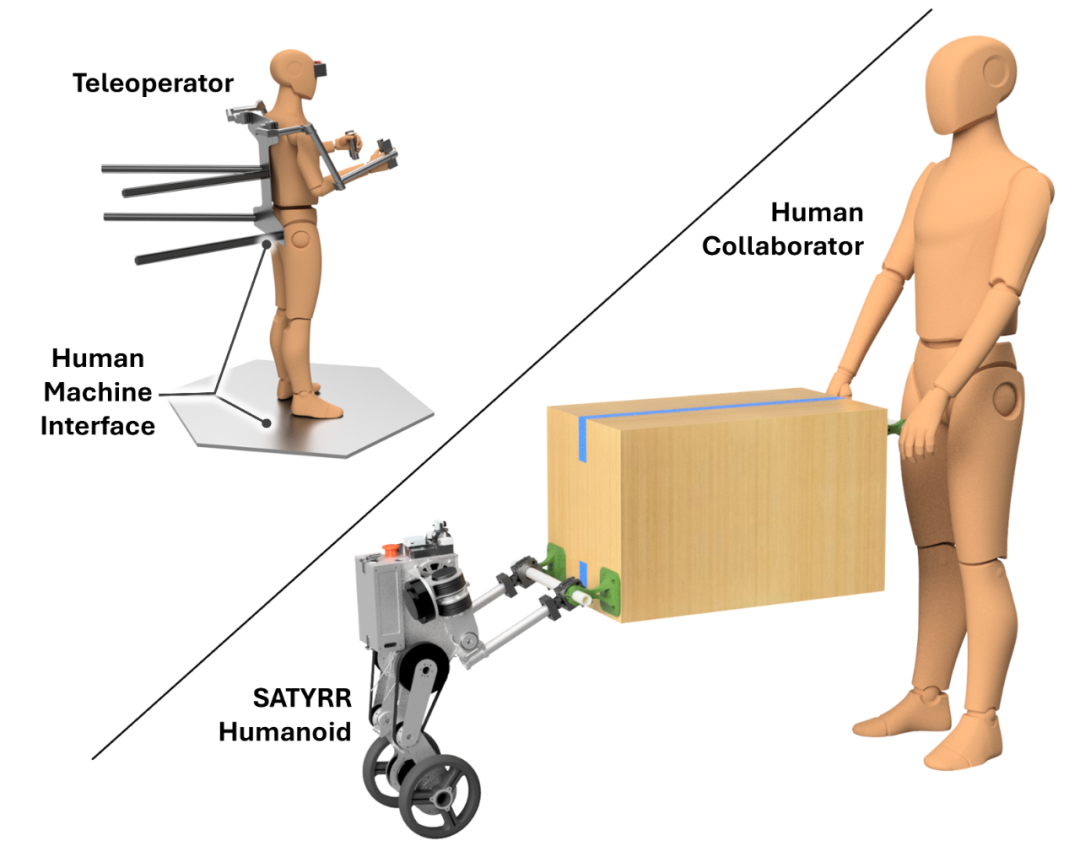
为了实现这一目标,研究人员正在探索将人类的规划和智能嵌入到机器人控制回路中的方法,即远程操作。这种方法旨在利用人类的适应性,并尝试发现自主执行这些任务的关键。通过全身运动重定向策略,机器人能够实时地利用人体运动来控制其运动,而操作员则可以直接用他们的手臂来控制机器人的操作。
▍提出新框架,赋予人形机器人DLM能力
前不久,来自美国伊利诺伊大学香槟分校的研究人员针对如何使人形机器人具备DLM能力这一关键问题展开了深入研究。他们创新性地提出了一种采用位置或力映射进行操作和运动的全身重定向框架,该框架可通过捕捉操作员的全身运动来精确控制机器人的位置和姿态,同时提供力反馈以增强操作员的感知和控制能力。
为了增强操作员对周围环境的感知,研究人员还提出了一种双边遥操作框架,从而创造了更具沉浸感的远程操作体验。具体来说,他们使用人机界面(HMI)来测量人体的俯仰角、捕捉手臂运动,并提供相应的触觉力和扭矩反馈。
通过进行实验测试,团队验证了所提方法的有效性,并充分展示了全身力矩反馈在提升操作员情境意识方面的显著作用。
尽管已有研究成功实现双足同步行走和人形机器人全身控制,但强力任务或人机协作(HRC)中的运动和操作协调尚未充分展示。该研究弥补了这一空白,展示了涉及环境互动和HRC的DLM任务,并研究了触觉反馈在提升操作员意识和DLM任务完成率中的作用。
那么,这项研究具体是怎样的呢?接下来,一起来和机器人大讲堂深入探索吧!
▍两大路径,一大方法,常用机器人远程操作策略分析
在机器人远程操作领域,全身重定向策略和操纵映射方法是两种主要的技术路径。
全身重定向策略通过将人类的躯干倾斜角映射到机器人基座的速度,实现站定和精确位置跟踪。这种方法简单直观,使操作员能够通过身体倾斜来控制机器人的移动,无需复杂的遥控器或键盘操作。然而,由于机器人的加速度与倾斜角成正比,动态响应性较差,操作员需要不断调整机器人的加速度和位置以保持精确的位置跟踪,这可能会增加认知负担。
相比之下,动态响应重定向策略直接映射人类躯干的动态成分到机器人的动态成分。这种策略允许操作员直接控制机器人的加速度,从而在动态交互任务中表现出更好的响应性。它增强了操作员对机器人动态行为的控制能力,减少了在动态任务中的认知负担,提高了操作的流畅性和效率。然而,这种策略需要操作员有更高的技能水平来精确控制机器人的加速度和倾斜角度,且在需要精确位置控制的任务中可能不如位置控制策略有效。
另一种方法则是关节空间到任务空间的操作映射,它通过捕捉操作员的手臂运动并使用逆运动学方法求解机器人手臂的期望关节角度来实现。这种方法使得操作员能够直观地通过手臂运动控制机器人手臂的末端执行器位置,实现精确的操作任务。结合力反馈技术,操作员可以感知到与环境的交互力,进一步提高操作的沉浸感和精确性。然而,逆运动学求解可能受到机器人手臂奇异构型的影响,导致在某些姿态下无法准确跟踪期望位置。此外,力反馈的精确性和稳定性也是影响操作体验的关键因素之一。
总的来说,全身重定向策略和操纵映射方法在创建直观和沉浸式机器人远程操作体验方面具有巨大潜力,但也面临一些挑战。
▍三大技术创新,优化动态定位与操控(DLM)任务
传统的机器人控制方法,如依赖机器人底座的加速度和手臂末端执行器的精确控制,虽能完成DLM任务,却往往要求操作员进行繁琐的调整以保持机器人的静止状态,从而增加了操作的复杂性。
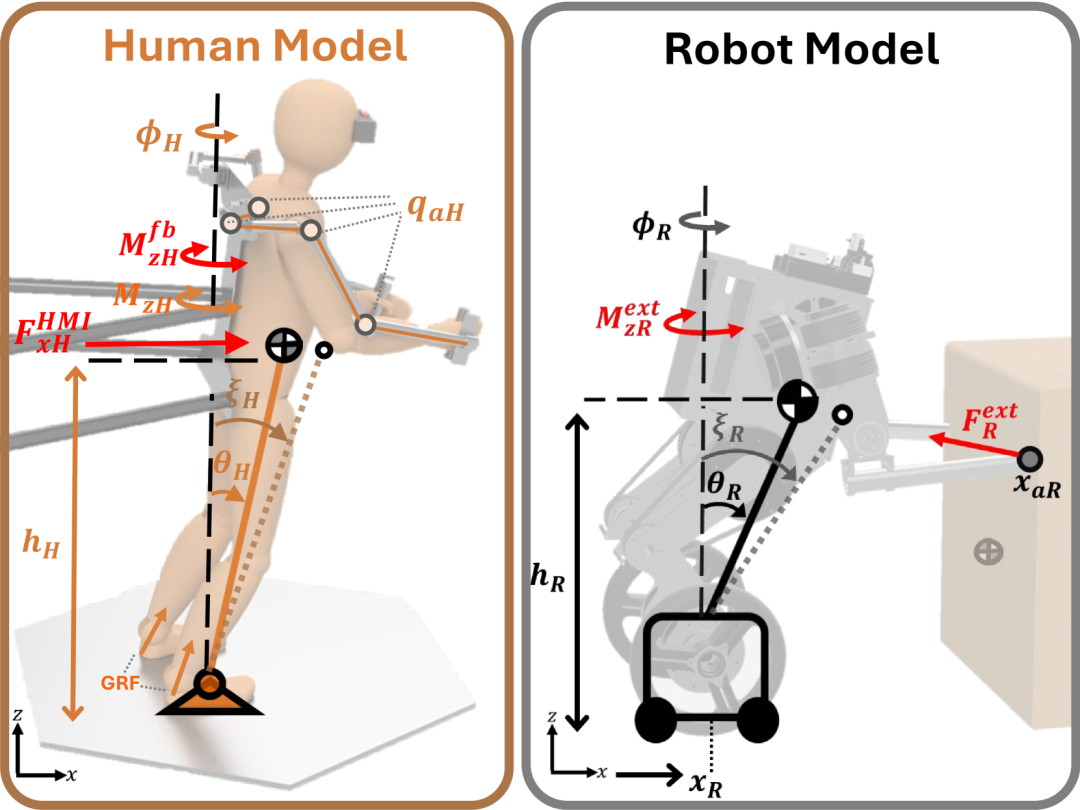
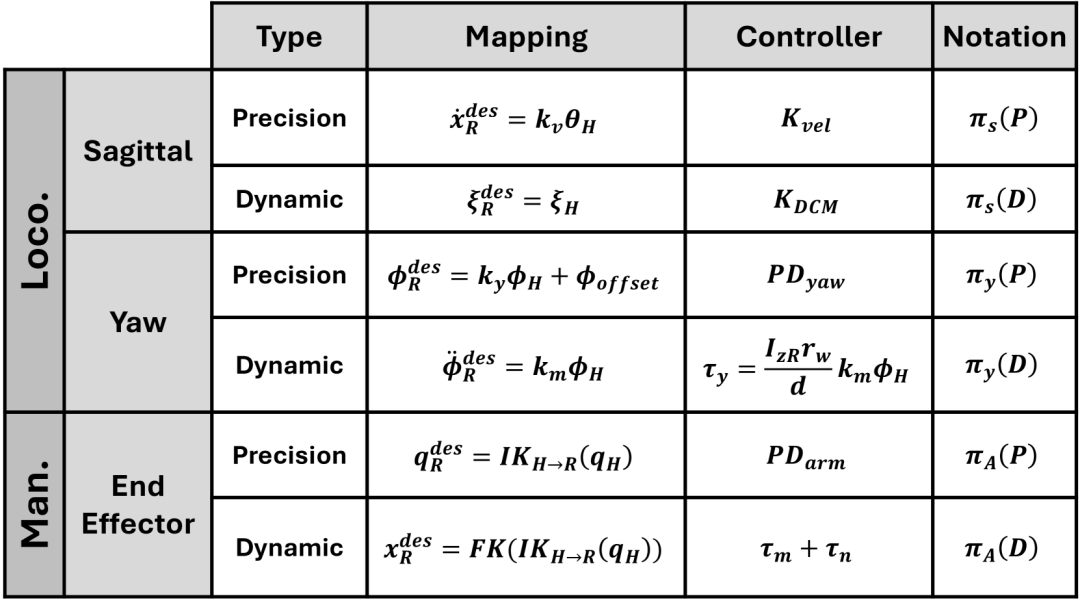
为了优化动态操纵任务(DLM)的执行,研究团队提出了一种混合位置-力映射策略,该策略通过整合平移运动和偏航运动的精确控制及动态力控制,实现了机器人的高效操控。这种策略结合了人类躯干的俯仰角与机器人基础速度的线性映射,以及躯干俯仰角速度与机器人动态成分的映射,从而提供了非动态交互场景中的精确位置跟踪和需要动态响应的场景中的直接加速度控制。在偏航控制方面,该策略将人的偏航角线性映射到机器人的偏航角,适用于不需频繁旋转的场景;同时,在需要完全旋转时,通过偏航角映射到机器人的角加速度,实现无限制的旋转控制。
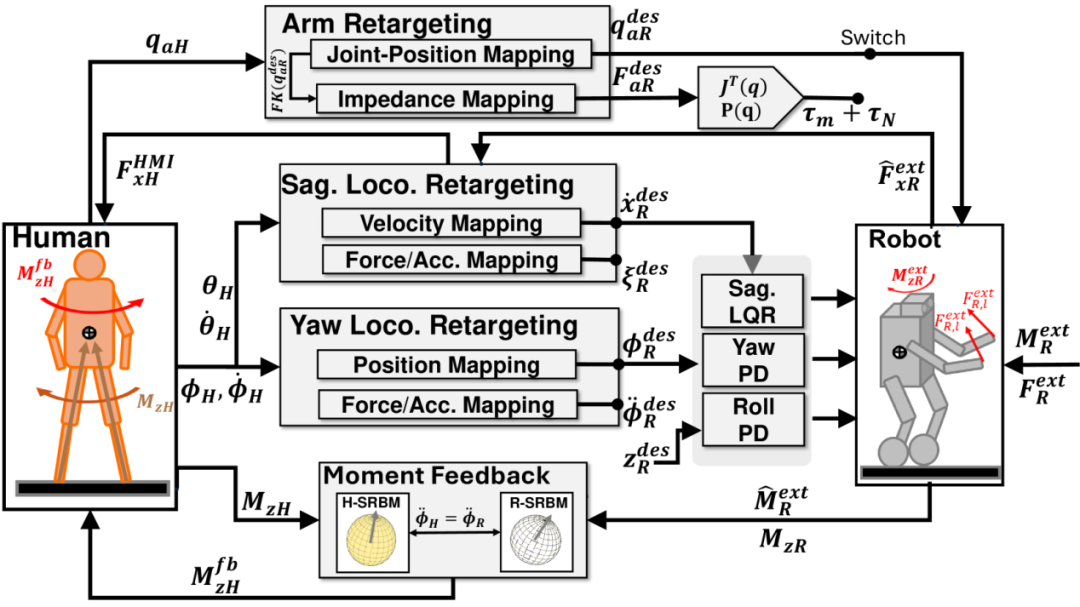
同时,团队也为末端执行器的运动控制引入了关节空间位置控制和阻抗控制两种策略。关节空间位置控制利用逆运动学将操作者臂关节角度映射到机器人关节角度,确保了精确的关节位置跟踪。这种方式适合需要细致臂部操作的任务。阻抗控制则调整末端执行器的阻抗参数来提供更好的柔顺性和安全性,这对于人机协作场景尤为重要。通过调节弹簧常数和阻尼系数,该控制策略允许末端执行器像一个三维的弹簧阻尼系统那样响应外部力,增强了操作的安全性和顺滑性。
为了增强操对机器人与环境交互的感知,团队还开发了一种触觉力矩反馈方法。这涉及到动力学建模和反馈力矩计算,通过测量人体的力矩和角加速度估算人体惯性,然后计算出施加到人体躯干的反馈力矩。实验中,团队发现直接使用人体施加的力矩作为前馈信号并不理想,因此选择不采用前馈信号,而是通过反馈力矩来同步人体和机器人的运动,并有效地传递环境阻抗信息。
这些技术的结合不仅提高了机器人操控任务的效率和精确性,还增强了操作者的情境感知和操作的直观性,为遥控操作领域带来了新的前景。
▍两大复杂应用实验,验证策略有效性和灵活性
为了在验证所提出的动态力控制(DLM)框架在复杂任务中的实际应用效果,研究团队进行了两项实验。
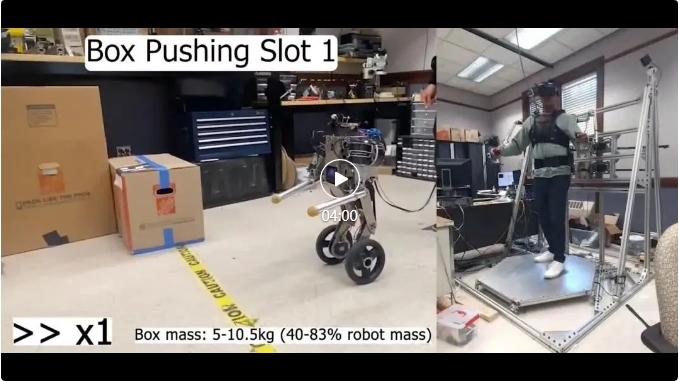
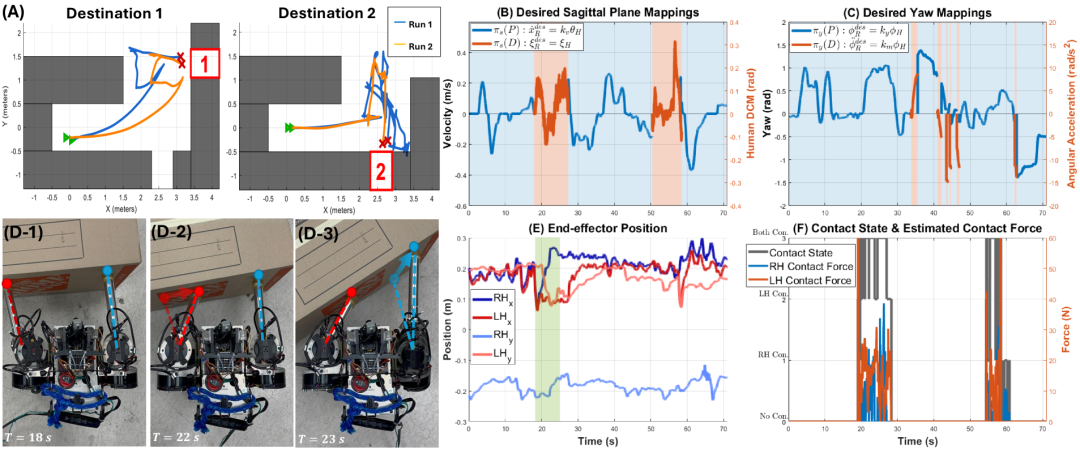
重物插槽实验
重物插槽实验的主要目的是通过操控机器人全身运动,包括位置和姿态的调整,来将重物推入预定位置。这一过程涉及多个阶段的控制切换,初步对齐阶段使用精确的速度控制模式确保机器人与箱子正确对齐。在动态推送阶段,通过动态加速度控制模式加速基座的移动,禁用轮子位置跟踪,实现箱子的动态推动。同时,偏航角的精确位置控制和动态角加速度控制在方向调整中起到了关键作用。实验结果显示,通过精确控制和动态调整的结合,成功完成了复杂的推送任务,该策略在复杂动态任务中的仍具有适应性和灵活性。
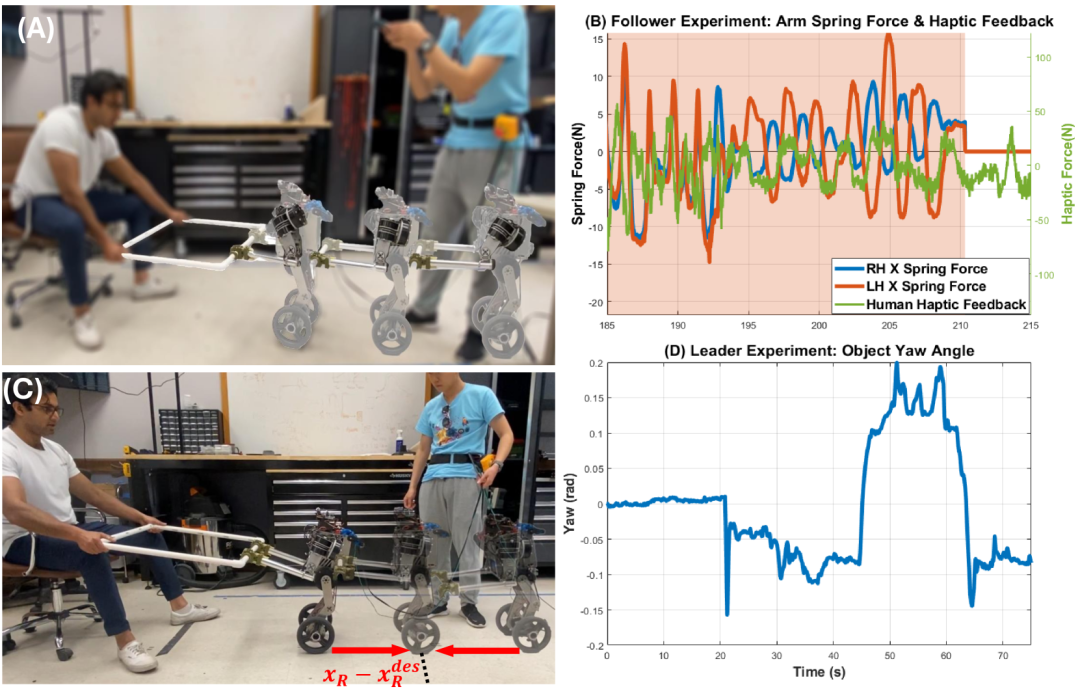
人机协作搬运实验
人机协作搬运实验重点演示了在人机协作中如何有效地搬运轻质物体。在跟随者角色中,机器人通过精确的位置控制接近并抓取物体,之后利用动态加速度控制和阻抗控制模式柔顺地跟随人类的运动。实验中,该策略展现出良好的响应性和与人类协作者的同步移动能力。领导者角色则要求机器人引导运动,并在必要时进行动态调整防止误差累积,并通过精确旋转完成了复杂操作。实验中,该策略确保了操作准确性和安全性。这项实验特别强调了在搬运和旋转过程中机器人与人类协作者的互动,证明了控制框架在实际应用中的应用价值。
这两项实验共同验证了研究团队所提出的动态力控制框架的有效性和灵活性,尤其在需要精确和动态操作的复杂任务中表现出色。实验结果不仅展示了机器人操控的高效性,还突显了在多变操作环境下,如何通过全身运动控制来实现复杂任务的潜力。
参考文章
https://arxiv.org/html/2407.12189v1



