
试想一下,如果你的一只脚(或双脚)无法适应崎岖的路面,或者无法做到脚趾弯曲来辅助你维持身体的平稳,那将是一种怎样的感受。这正是许多肢体残疾人士所面临的问题,不过目前一种实验性的新型仿生脚可能会改变这一现状。

目前,市场上的大多数假肢脚要么是完全刚性的,要么是柔顺度有限。相比之下,人类的脚能够大幅度地弯曲和伸展,这使得我们能在不平坦或倾斜的路面上保持平衡,并在行走时辅助腿部向前移动。而SoftFoot Pro假脚的设计目标,正是要将这些自然功能融入其中。
这款原型设备由意大利理工学院的Manuel G. Catalano及其研究团队共同研发,其独特优势在于无需任何外部电源供电,同时重量轻盈,仅为450克(约合1磅)。更令人惊叹的是,这款假脚具有强大的支撑力,足以支撑佩戴者高达100公斤(约合220磅)的体重。
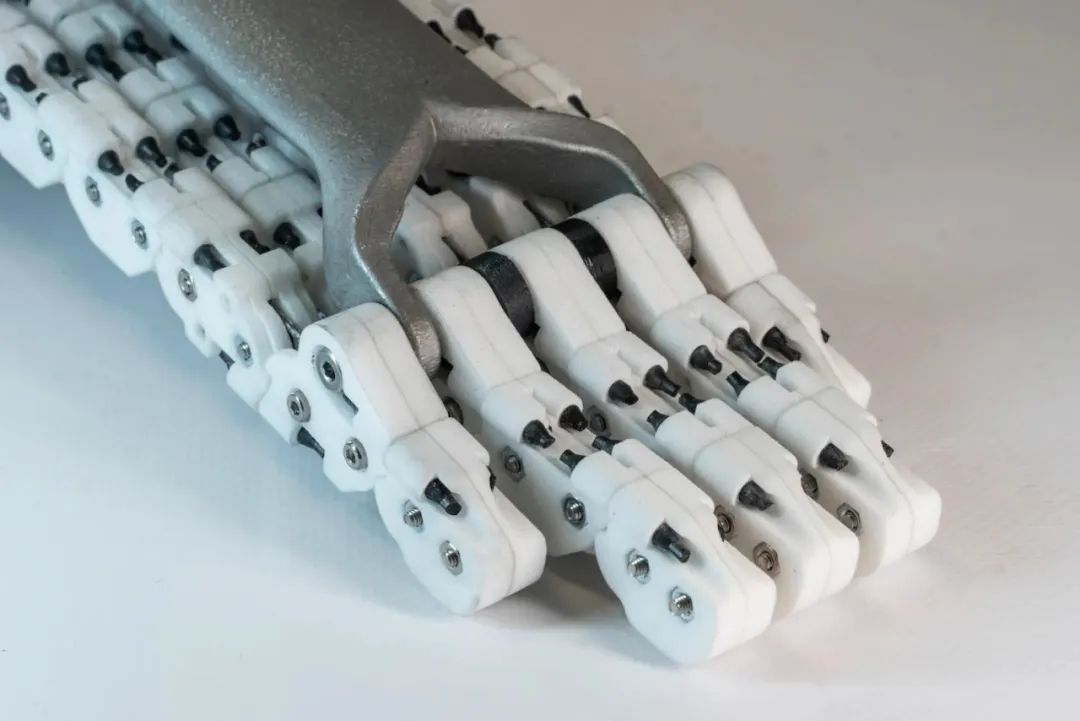
SoftFoot Pro由五条平行的高强度塑料链构成。每条链的前部模拟了指骨(趾骨)结构,而后部则复制了跖骨(从每个脚趾根部延伸至脚跟的部分)。这些链条通过弹性连接器相互连接,其长度由内部钢缆支撑,并稳固地固定在钛合金鞋跟上.

在五条链条之上,是一个钛制的足弓装置。它的一端连接到趾骨根部,另一端则连接到脚跟,且两个连接点都允许趾骨和脚跟相对于足弓进行旋转。这一装置的作用与人类足底的筋膜相似,后者是一条将脚跟骨连接到脚趾根部的组织带。
与足底筋膜在脚中的作用相类似,SoftFoot Pro的足弓机制允许它在每次迈步结束时,脚趾弯曲时储存能量,然后在脚抬离地面向前迈出下一步时释放这些能量。当假肢确实与地面接触时,其灵活的设计据称可以吸收10%到50%的冲击能量。
此外,SoftFoot Pro还允许脚趾在爬坡时相对于脚的其他部分进行弯曲,从而帮助用户保持直立姿势。同时,它也能适应不平坦的地形,防止用户翻倒。该设备还使得跪下或蹲下等动作变得更加容易,并且由于它不受水的不利影响,因此非常适用于各种户外活动。
作为汉诺威医学院和维也纳医科大学临床试验的一部分,SoftFoot Pro原型已经由单侧下肢截肢者进行了多次测试。这些测试覆盖了不同的地形条件和日常活动场景,旨在评估SoftFoot Pro原型仿生脚在实际使用中的舒适度、稳定性和耐用性。实验结果表明,SoftFoot Pro能够显著改善用户的行走体验和提高其平衡能力。

除了用户测试外,研究团队还在苏黎世联邦理工学院(ETHZ)的四足机器人Anymal和东京大学实验室的人形机器人HRP-4上成功进行了SoftFoot Pro的测试。实验结果表明,SoftFoot Pro的柔性足部设计能够显著提高机器人在复杂地形中的适应性和稳定性。
随着材料科学和仿生工程技术的不断发展,SoftFoot Pro有望在材料选择、结构设计、性能优化等方面实现进一步的升级与优化。



