
随着科技的飞速发展,现代工业和基础设施中的核心设备与结构必须接受定期检查,以确保其持续稳定运行并有效避免功能故障。然而,这些环境往往导航路径错综复杂,不仅包含难以触及的狭窄空间,如毫米级乃至亚毫米级的细小缝隙,还遍布着跨越固体、液体乃至空中等多个领域的重重障碍。
为应对此挑战,研究人员已开发出多种机器人,但大多数机器人通常仅设计有一种运动模式来跨越特定障碍物,而在实际应用中,如高价值资产、复杂建筑空间和土木工程住宅的检查,需要机器人具备多种运动模式穿越包含多种类型障碍物甚至多个领域的空间,特别是在工业环境中,机器人还需具备毫米级厚度和多模态运动能力,这仍然是一个挑战。
▍厚度仅1.7mm,实现多模态运动转换
对此,来自诺丁汉大学东昕博士团队的研究人员近日开发出一款名为Thin Soft Robot(简称TS-Robot)的“超薄软体机器人”。该机器人厚度仅为1.7毫米,创新性地结合了双驱动夹层结构与可调泊松比张紧机制,并采用介电弹性体作为驱动方式。它具备线性和波动两种步态模式,不仅能在固体和液体环境中执行多模态运动,还拥有在这两种环境之间自由转换的能力。
此外,TS-Robot性能惊人,其输出力约为自身重量的41倍,速度更是达到了1.16倍体长/秒和13.06倍体厚/秒。该机器人未来有望在高价值资产检测、工业设施维护以及危险环境探索等领域发挥重要作用。
该研究成果的相关论文已以“Multimodal locomotion ultra-thin soft robots for exploration of narrow spaces”为题发表在Nature Communications,论文第一作者为诺丁汉大学王熙,共同作者包括诺丁汉大学李思千、张容哲、刘晶、Dragos Axinte,通讯作者为诺丁汉大学东昕。
▍TS-Robots的设计与实现
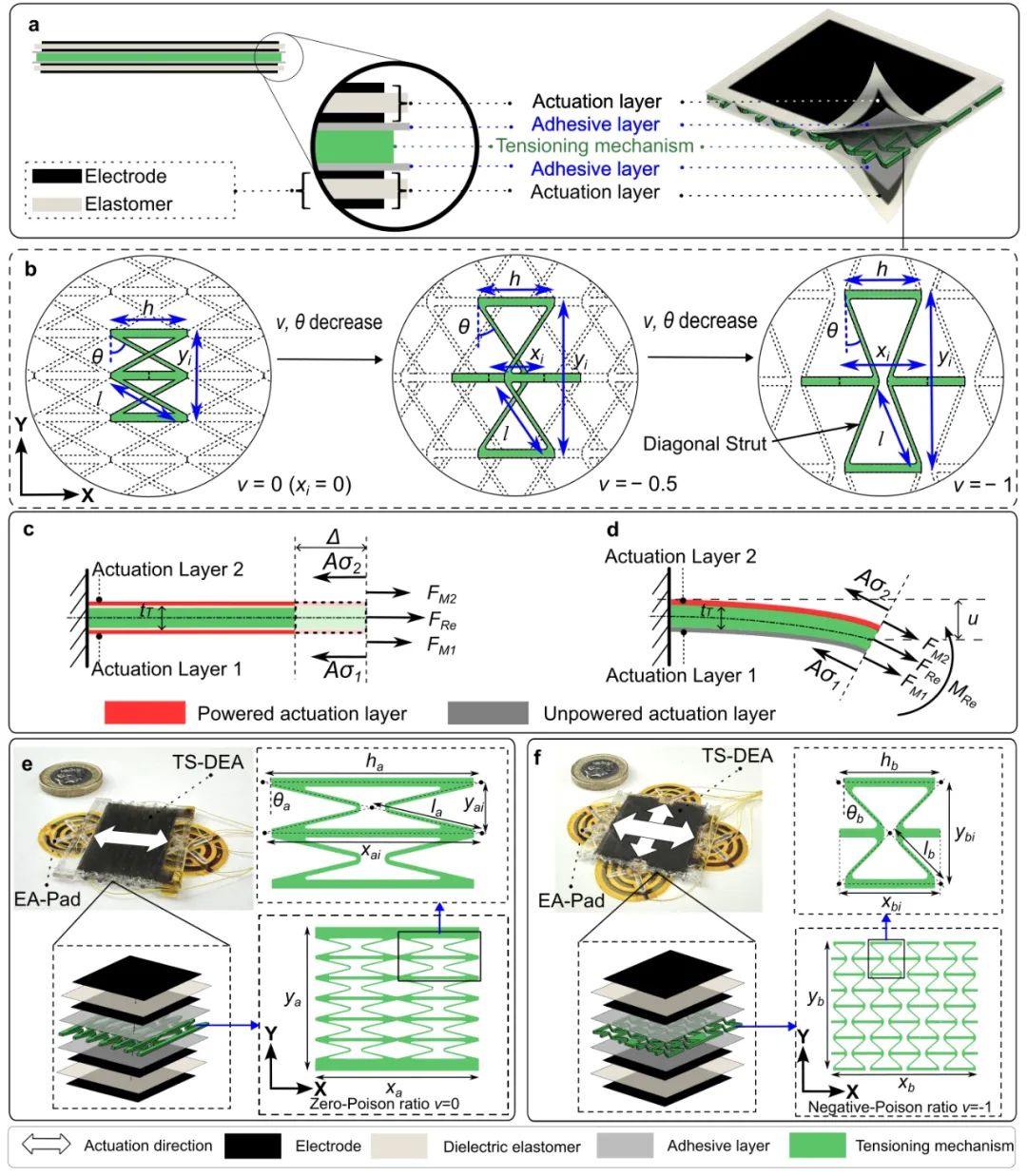
TS-Robots由两个子系统组成,包括用于产生位移和驱动力的超薄介电弹性体驱动器(TS-DEA),以及提供机器人附着力的静电脚(EA-Pad)。
TS-DEA采用双驱动夹层结构设计,包含两个驱动层,中间有一个可压缩,可调泊松比的张紧机构。每个驱动层由夹在两个电极之间的柔性弹性体组成,通过粘合层与张紧机构粘合。基于这种设计,TS-DEA可以执行两种驱动类型:通过同步两个驱动层的位移实现平面内的线性压缩/伸展变形,以及通过差异驱动两个驱动层的位移实现弯曲变形。
根据应用需求,可以选择使用丙烯酸基(用于低频驱动)或硅基(用于高频驱动)弹性体作为驱动层材料。更重要的是,这种设计使得可以通过结构设计改变张紧机构的属性(如刚度)来轻松调谐TS-DEA的共振频率,从而实现快速驱动。
为了评估超薄软体机器人的跨领域多模态运动性能,该团队研究人员提出了以下三类机器人设计:
(1)Type-A TS-Robot:该设计由零泊松比的TS-DEA(v=0,记为Type-A TS-DEA)和两个EA-Pad组成;机器人可以在一个方向上进行伸缩和弯曲运动。
(2)Type-B TS-Robot:该系统由负泊松比的TS-DEA(v=-1,记为Type-B TS-DEA)和四个EA-Pad组成;机器人可以通过伸缩运动实现X,Y两个方向爬行。
(3)Type-C TS-Robot:该系统包含零泊松比的TS-DEA和单向摩擦脚。其驱动器记为Type-C TS-DEA。
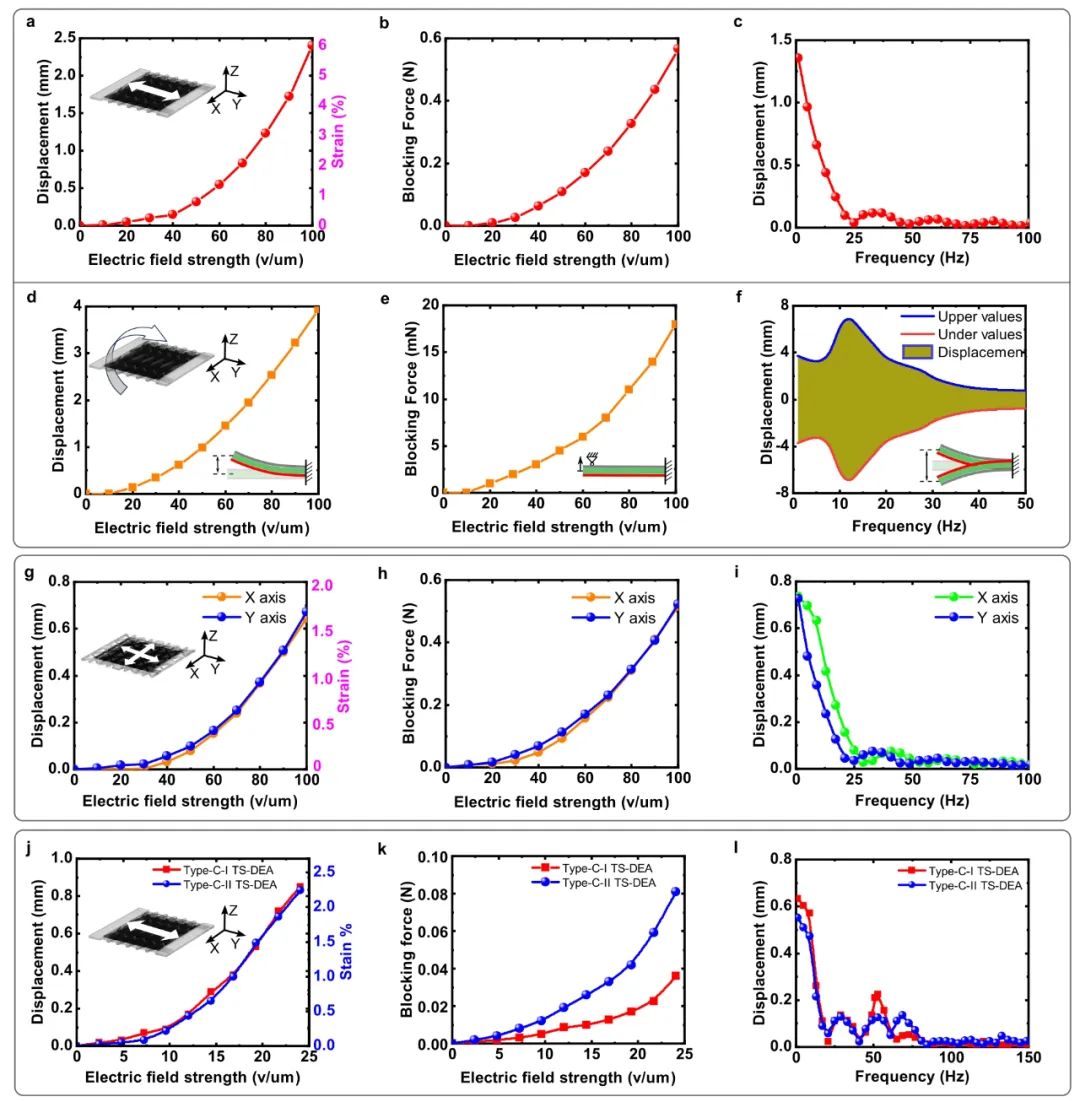
TS-DEA性能测试(a-f: Type-A TS-DEA; g-i: Type-B TS-DEA; j-l: Type-C TS-DEA)
▍TS-Robots性能实验与应用测试
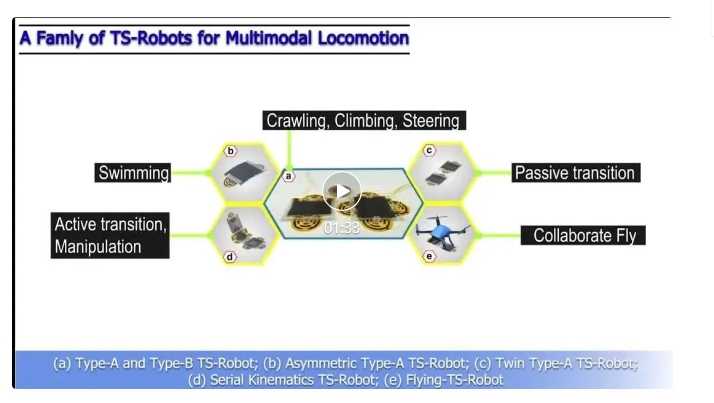
单个TS-Robot机器人能够在固体和液体领域内以及跨领域执行五种基本运动模式,包括爬行、攀爬、转向、游泳和着陆。为了全面评估其性能,研究团队进行了一系列测试,包括单个TS机器人的运动测试、多个TS-Robot机器人的运动和操控以及TS-Robot与其他类型机器人的相互协作测试。
单个TS-Robot运动性能测试
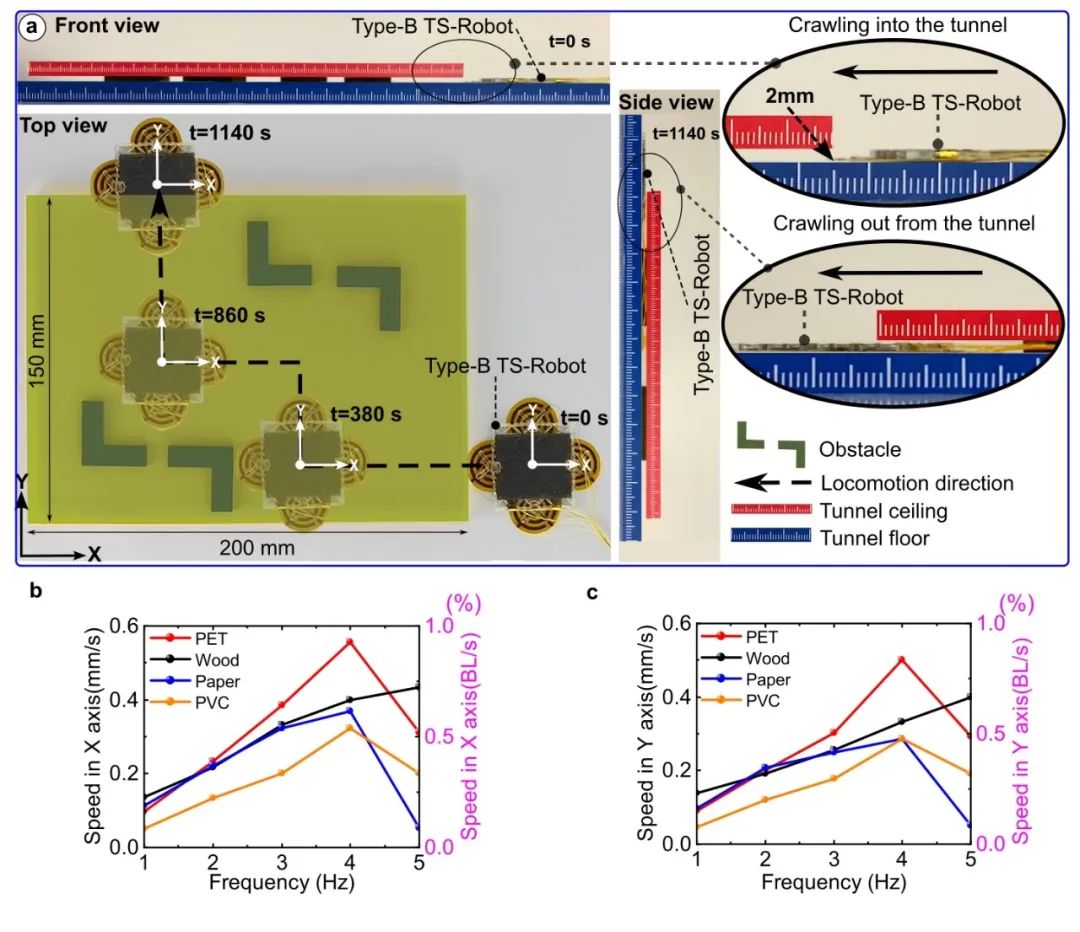
研究人员首先测试了Type-A TS-Robot在水平表面上的爬行能力和在垂直墙面的攀爬能力,实验验证了这两种情况下机器人均可穿越2毫米狭小空间。机器人的爬行速度主要由驱动器在不同频率时的位移和EA-Pad的粘附性能决定。在PET、木材、纸张和PVC等不同材质表面上进行了测试,机器人在水平和垂直PET表面上的最大速度分别达到了2.3毫米/秒(3.5%体长/秒)和1.7毫米/秒(2.8%体长/秒)。
硅基TS-DEA由于其高频驱动能力,表现出了卓越的速度性能。研究人员展示了配备有单向摩擦脚的Type-C-II TS-Robot的高速移动性能,最高速度达到43.1毫米/秒,相当于每秒1.16倍体长和每秒13.1倍体厚。此外,研究人员还测试了一种低电压(220V)驱动的新版本TS-Robot,称为低电压Type-C TS-Robot(L-Type-C TS-Robot),展示了其在86Hz谐振频率下的无线驱动潜力,最大爬行速度达到12.4毫米/秒,并能够承载高达3克的负载(2.5倍自重)。
在实际应用方面,研究团队验证了使用TS-Robot对Rolls-Royce电动航空发动机进行电机检测。在这一演示中,使用了一种变体的Type-A TS-Robot(弯曲型Type-A TS-Robot,记为C-Type-A TS-Robot,厚度0.8毫米),以评估其在电机磁场退化现场检测中的可行性。结果表明,C-Type-A TS-Robot能够在Rolls-Royce AE2100混合动力系统的模拟环境中的转子和定子之间的1.2毫米窄气隙中运动,解决了传统工具无法进入极窄空间的问题。

Type-B TS-Robot具备X,Y两个方向爬行的能力,因此,当狭窄间隙中存在障碍物时,Type-B机器人可以改变爬行方向以避开障碍物,图中展示了机器人在高度为2毫米的隧道(长度200毫米,宽度150毫米)中进行爬行和转向测试的结果。
当爬行机器人遇到液体障碍物时,可以通过模仿水蛭的波动步态在液体中游泳。研究人员系统地探索了TS-Robots在液体以及固体和液体环境之间转换的运动能力(例如油和水)。与陆地运动不同,利用TS-Robots的弯曲运动,其中一个EA-Pad作为尾部产生推力,模仿水蛭的游泳运动。机器人在液体中可以以约45.5毫米/秒(0.7体长/秒)的平均速度游泳。高速摄像机记录了机器人在液体环境中以12Hz驱动时的波动步态。

多个TS-Robots运动性能测试
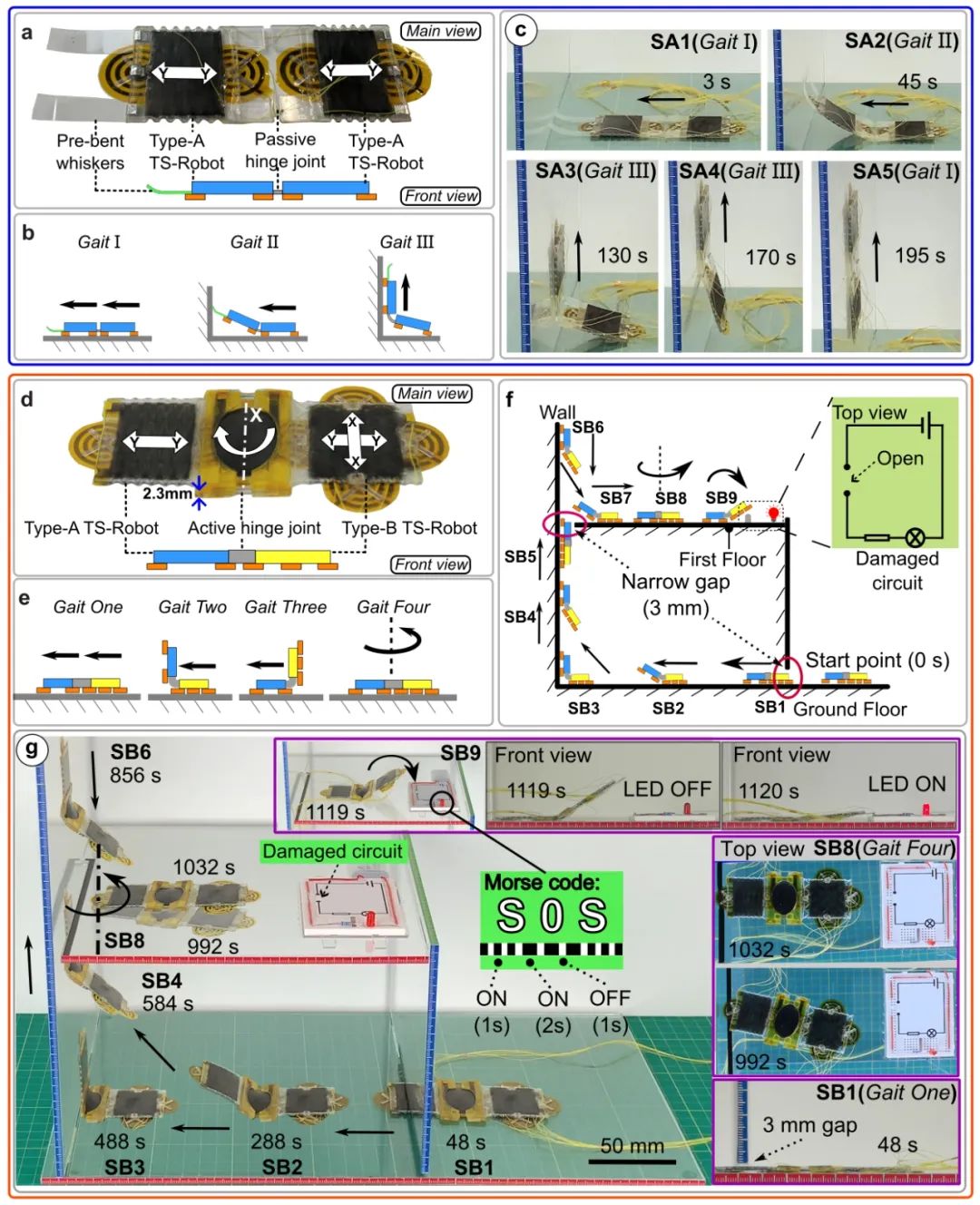
当单个TS-Robot在任务中遇到无法克服的挑战(例如在不同表面之间转换和复杂操作)时 ,TS-Robots可以组合成“组装体”以协作执行任务。通过一个主动控制铰链将Type-A和Type-B TS-Robots串联连接(SK-TS-Robot)。系统可以在主动铰链被驱动时切换到平面状态,而在未被驱动时切换到“L”形状态。因此,SK-TS-Robot的设计可以执行四种步态,以穿过狭窄缝隙、转向、在表面之间转换和作为操纵器使用。
为了展示SK-TS-Robot的运动和操作能力,研究人员构建了一个包含两个3毫米高狭缝的两层测试装置:一个在地面上的水平缝,一个在第一层的垂直缝。SK-TS-Robot从地面入口开始,通过九个步骤(SB1 – SB9),到达第一层并通过其前EA-Pad重新连接“损坏”的电路,同时通过电路中的LED发送可编程光信号(例如SOS)。
TS-Robot与其他类型机器人相互协作
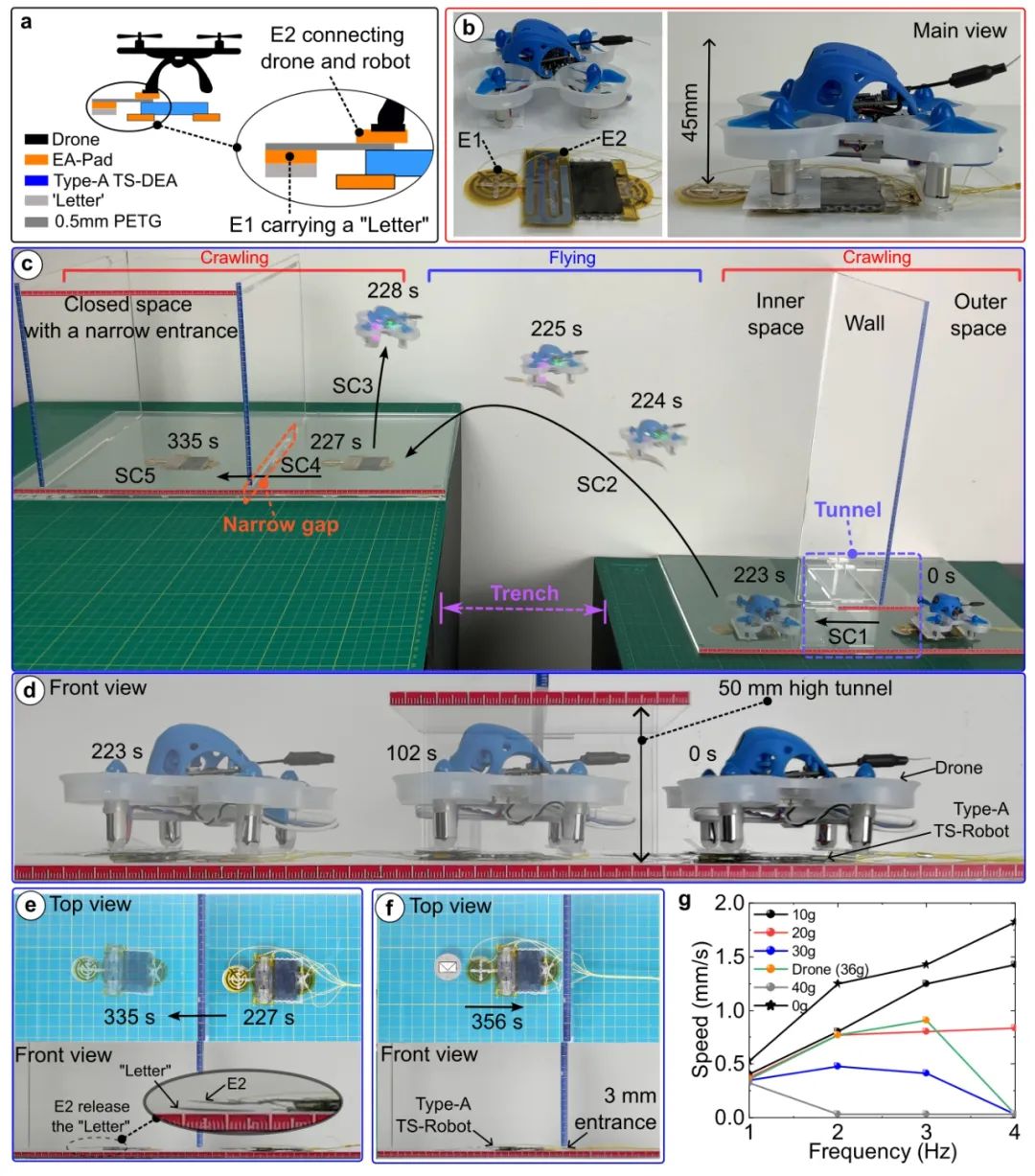
此外,TS-Robots还可以与其他类型的机器人协作作为载体,从而获得额外的运动模式,以探索更具挑战性的环境。由于TS-DEA能够产生相对于其自身重量的大推力(例如Type-A DEA:最大0.57牛顿,相当于其重量的48倍),TS-Robots可以用来携带其他机器人,例如小型无人机,使得混合系统能够在固体和空中环境中混合爬行和飞行。在这次测试中,研究人员使用了一个由Type-A TS-Robot和一个小型现成无人机组成的混合系统(Flying-TS-Robot),用于物品投递。为连接机器人和无人机,一个EA-Pad(E2)位于Type-A TS-Robot的顶部,通过开启EA-pad进行连接。另一个EA-Pad(E1)通过一根0.5毫米厚的PETG杆件集成在机器人的前部,用于电粘附和携带轻物品(例如信件)以执行投递任务。
▍结语
在软体机器人领域,通过采用不同的驱动方法(例如静电和压电),可以实现超薄机器人的设计。这些方法已被应用于构建能够在平坦表面上迅速移动的昆虫级机器人。然而,介电弹性体执行器(DEAs)展现出了显著的优势,如高度柔性、大应变以及高功率密度,这使得单个或多个机器人能够实现多种运动模式。
据作者介绍,与同类型的介电弹性体驱动的软体机器人相比,本研究中的超薄软体机器人在狭小空间中的移动速度最快(以速度除以机器人厚度来衡量),因此更适合探索复杂的环境,尤其是在需要进入接近毫米和亚毫米高度的狭窄空间(例如大型机器或工业厂房内部组件之间的缝隙)时。此外,TS-Robots还是首个能够与无人机协作的小型软体机器人,为两者都增添了额外的爬行运动模式。
参考文章
https://www.nature.com/articles/s41467-024-50598-1



