
近日,太原理工大学的研究团队在仿生工程学报(Journal of Bionic Engineering)杂志上发表了一项创新研究,聚焦于四足机器人单腿的数字孪生技术。这篇题为" Research on the Virtual-real Interaction System and Interaction Characteristics of a Single-leg of Quadruped Robots Based on Digital Twin "的论文提出了一种基于数字孪生的虚实交互系统,为四足机器人的远程操控提供了全新的解决方案。
论文地址:
https://link.springer.com/article/10.1007/s42235-024-00573-9。
图1 最新发表文章首页
四足机器人具有良好的环境适应性、运动灵活性和动态稳定性,是非结构化和受限环境下的远程移动作业平台。然而,四足机器人的组成复杂,其稳定运行通常受到许多因素的影响,如硬件和软件系统、平衡控制和步态规划算法、智能避障策略。任何环节出现问题都可能造成四足机器人变得不稳定,甚至摔倒,最终导致任务失败。
为解决这些问题,研究团队提出了基于数字孪生的虚实交互系统,该系统可对四足机器人的运行状态进行及时、安全、高效的监测,以及验证其控制和规划算法,为四足机器人远程稳定运行提供了较为可行的方案。
以下为虚实运动交互系统的运行效果。
▍虚实运动交互系统框架
整体的系统框架为:物理实体(Physical model)、虚拟模型(Virtual model)、控制系统(Control system, CS)、数据服务系统(Data server, DS)和通信系统(Communication System)。
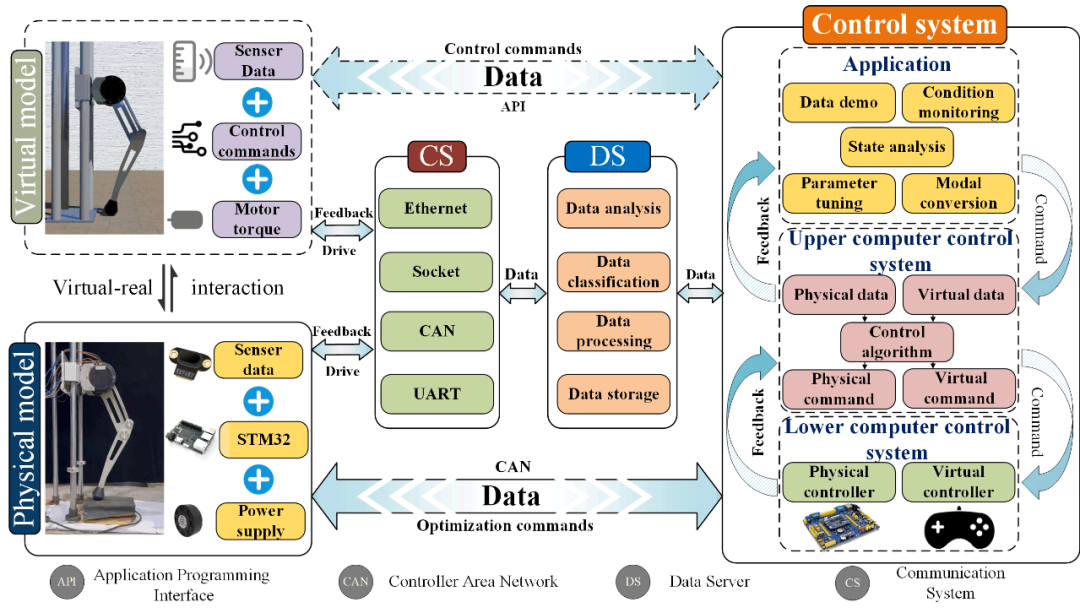
图2 系统整体框架
在面对复杂环境下的远程作业时,研究人员主要关注两个方面:(1)虚拟模型的高保真性,高保真模型可确保虚拟模型无论是否与机器人实体相连接,均能真实的映射机器人实体的运行状态。(2)双边控制策略,既控制系统能同时向机器人和虚拟模型下达控制指令,又能单独运行虚拟模型以验证新的控制策略。
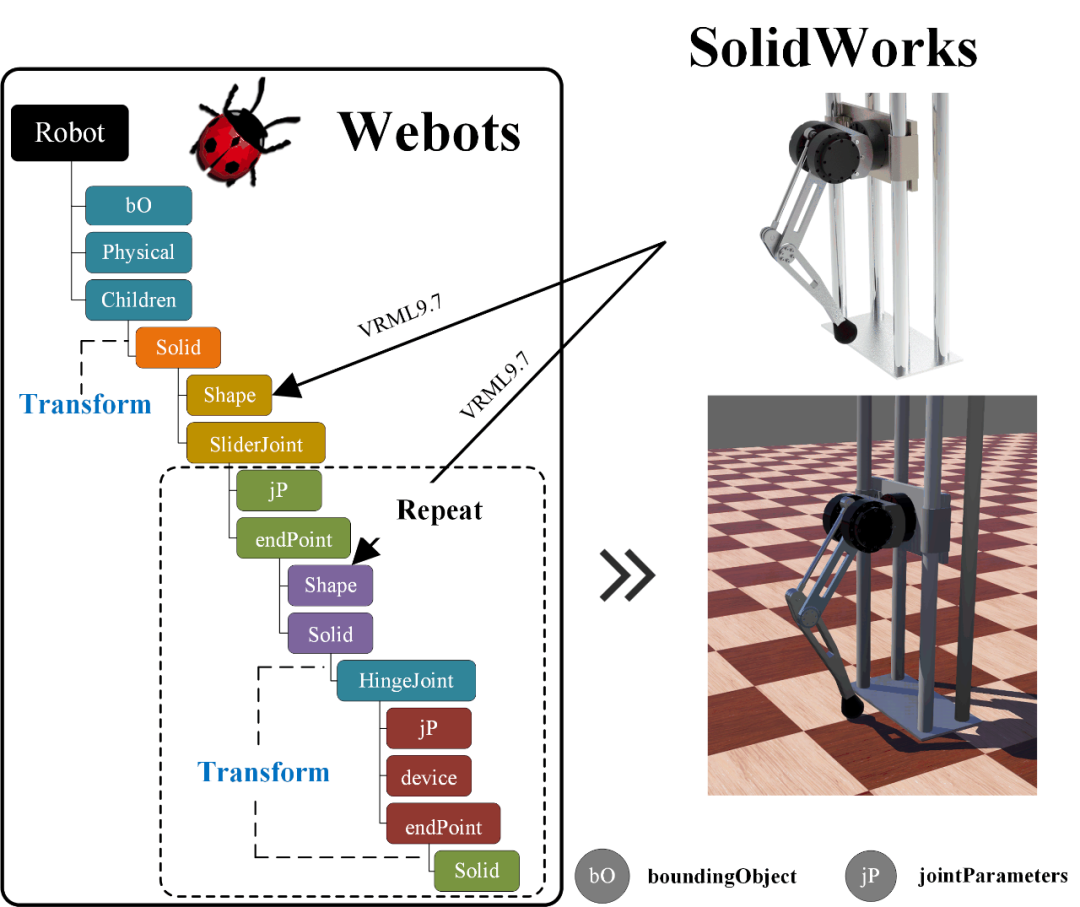
图3 虚拟模型构建流程
▍交互性能分析策略
为了保证虚实交互系统的准确性和快速响应性,团队提出了虚实交互系统的交互性能分析策略。
(1)系统延迟特性
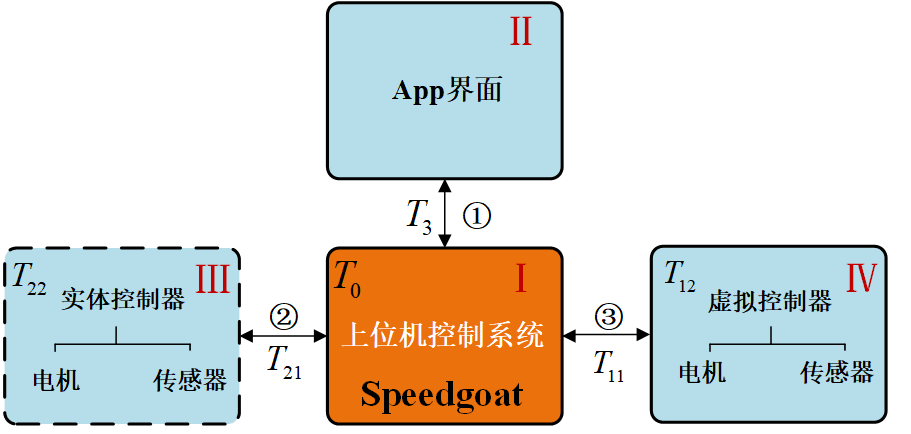
图4 系统延迟分支分析
以Speedgoat为中心,分别测试上位机控制系统与App界面、物理实体控制器、虚拟模型控制器之间的响应时间。
(2)虚实交互性能
本系统框架可实现四足机器人虚拟模型的位置控制和力控制。在位置控制时,虚实运动交互注重虚拟模型对运动指令的精确执行,即虚拟模型实现对物理实体的精准轨迹跟踪;在力控制时,虚实交互注重虚拟模型对外力的响应,即通过传感器反馈信息,实现单腿虚拟模型的姿态与外力作用下的单腿实体的姿态保持一致。
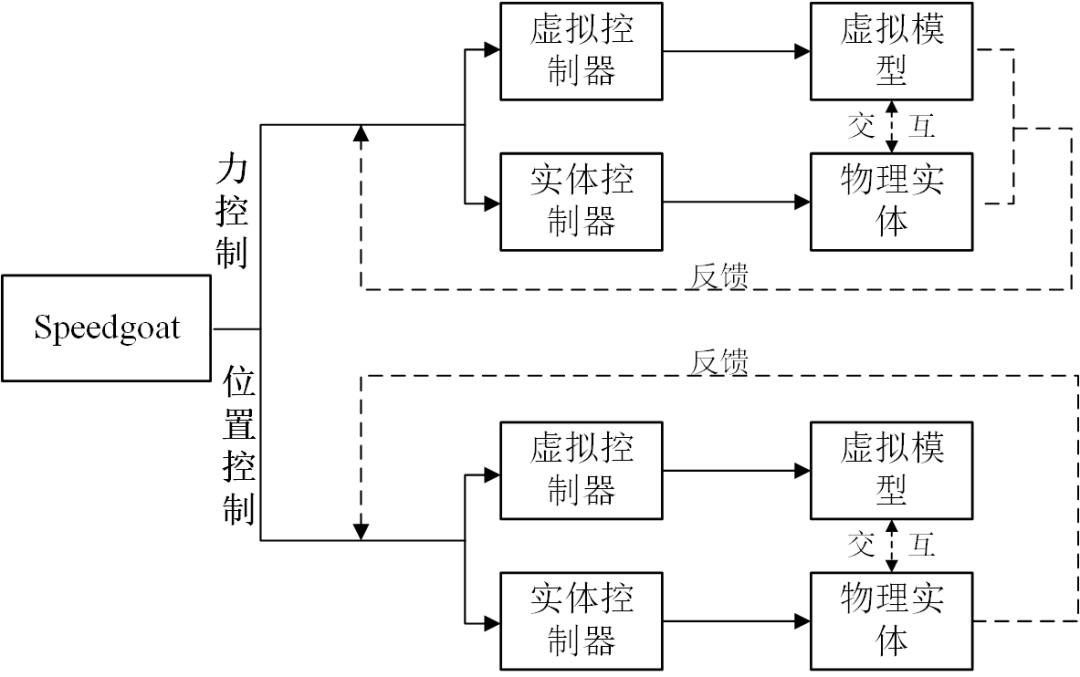
图5 控制性能分析框图
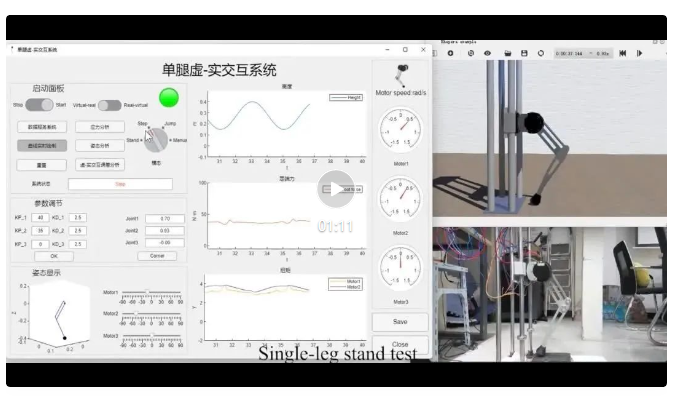
▍虚实交互系统的实验测试
下图展示了单腿站立和单腿跳跃的虚实交互效果。
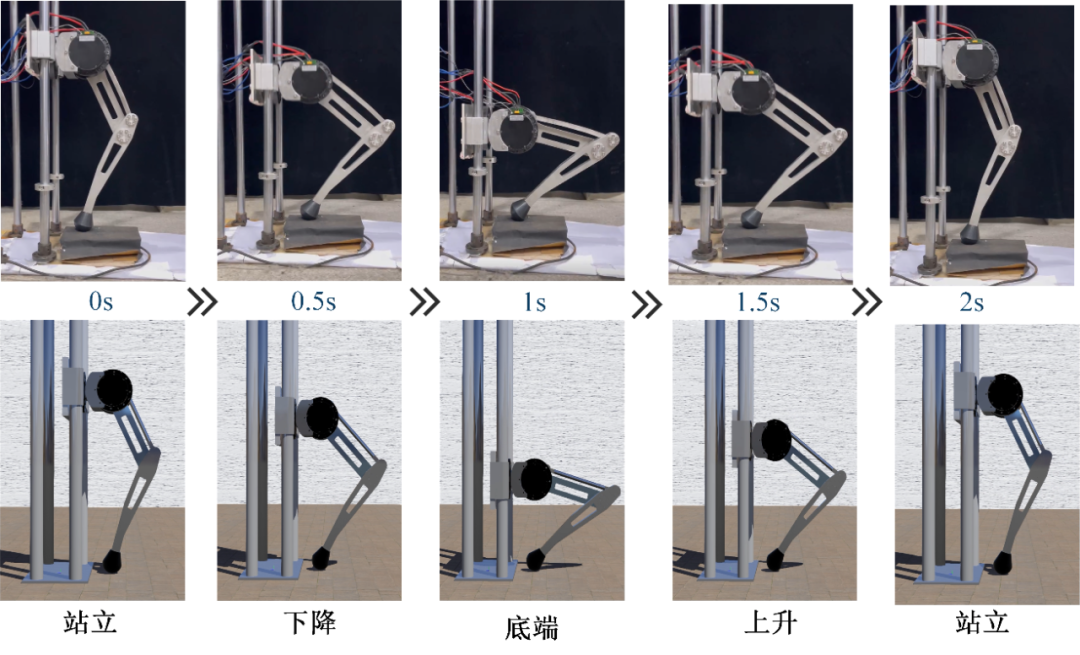
图6 单腿站立效果
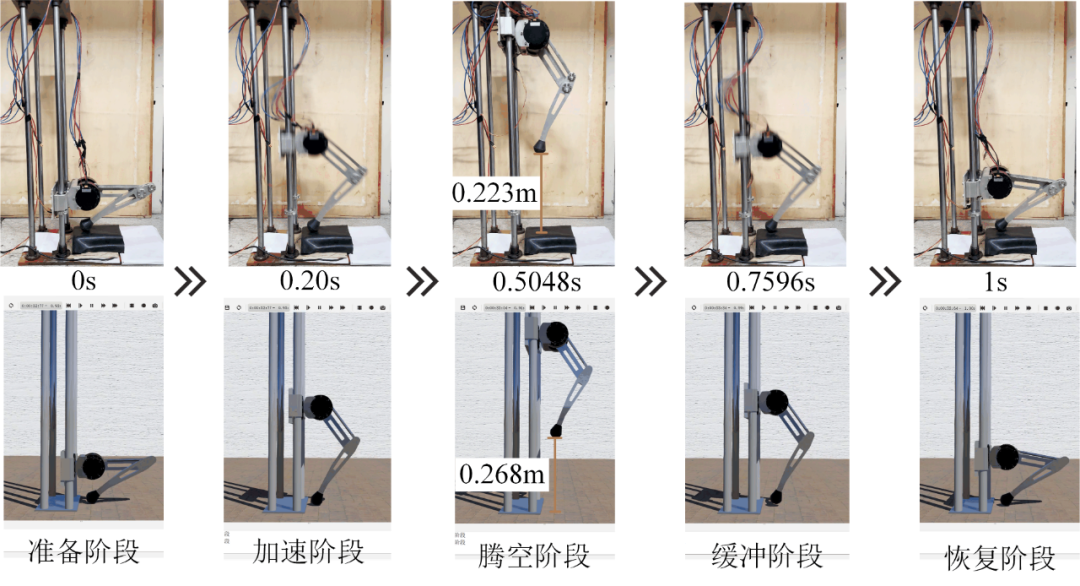
图7 单腿跳跃效果
除了机器人单腿的实验测试外,团队做还了一些其他的相关测试,包括单腿实映虚、整机独立仿真和整机虚实交互。
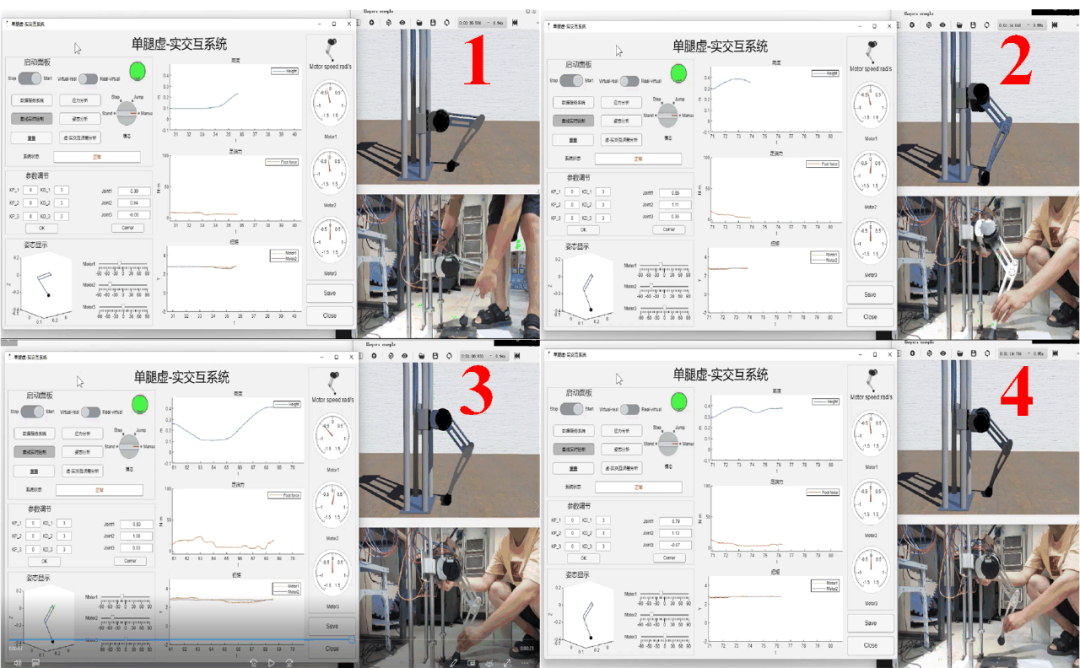
图8 单腿实映虚
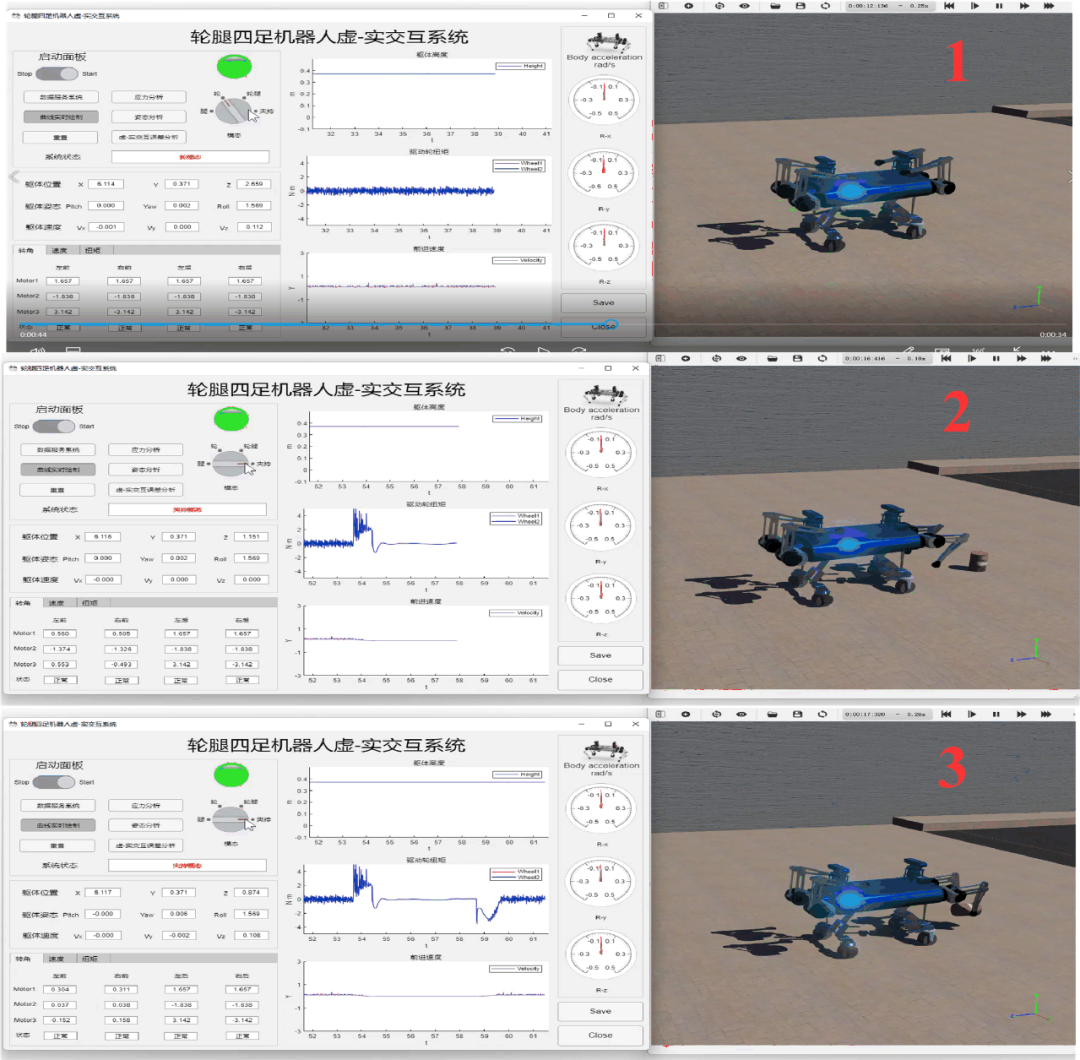
图9 整机独立仿真
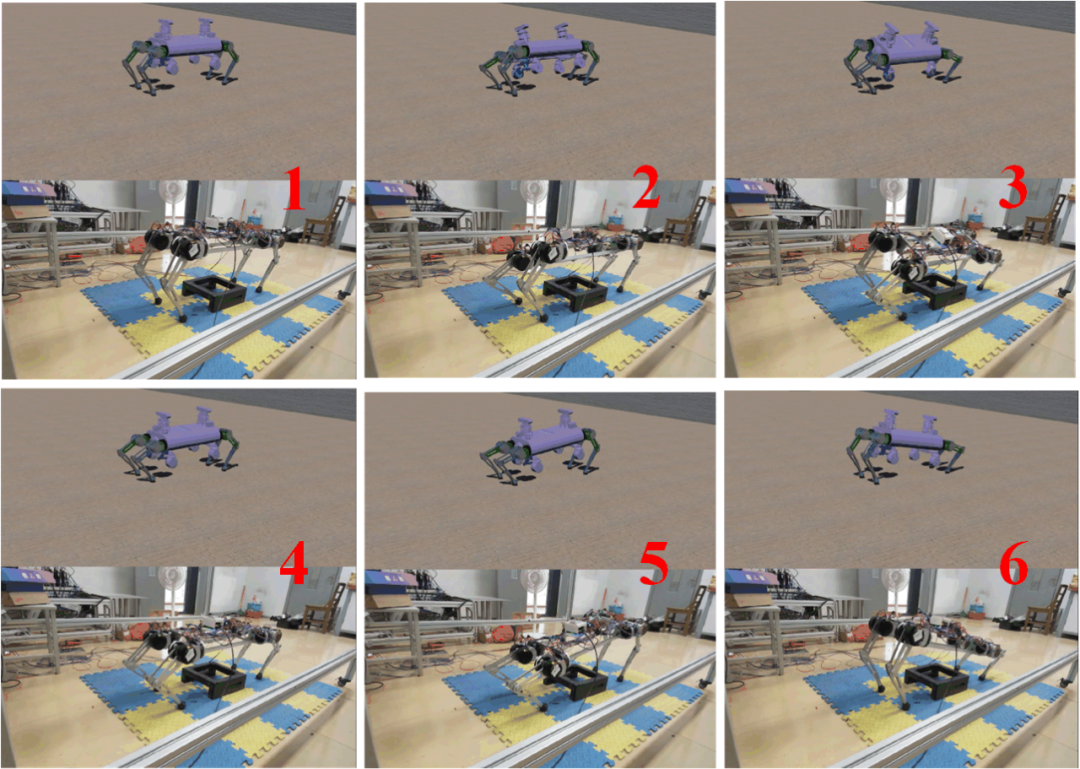
图10 整机虚实交互效果
上述实验效果显示,该四足机器人的虚实交互系统具有通讯延迟低、控制精度高、虚实交互性强的特点。
▍结语
本研究为四足机器人的远程状态监测和控制提供了新的思路。通过建立高保真虚拟模型,实现了物理实体与虚拟模型之间的映射和交互控制。系统的低延迟和高精度特性为四足机器人的远程操作和智能化奠定了基础。
机器人大讲堂认为,随着技术的不断迭代,这一基于数字孪生的虚实交互系统有望在四足机器人的远程状态监测与控制中发挥重要作用,为非结构化环境下的远程作业提供更可靠的技术支持。



