
乌龟作为一种典型的爬行动物,步态不仅稳定,而且拥有较低的能量消耗,这得益于其独特的肌肉结构和步态模式。在运动状态下,虽然乌龟的肌肉收缩速度较慢,但具有较高的能量效率。另外乌龟在行走时,其腹部会与地面接触,其姿态有助于分散足底受力,减少关节负荷,进一步提高运动能效。
为此,大韩民国科学技术研究院机器人与机电一体化工程系教授Dongwon Yun领导的研究小组开展的有关提高受乌龟启发的腿式机器人能源效率的研究,并模仿乌龟的步态和腹部拖动姿态,设计一款采用腹部拖动的对角线步态爬行四足机器人,该研究成果刊登在2024年5月《Advanced Intelligent Systems》封面上。
▍乌龟四足机器人是如何设计出来的?
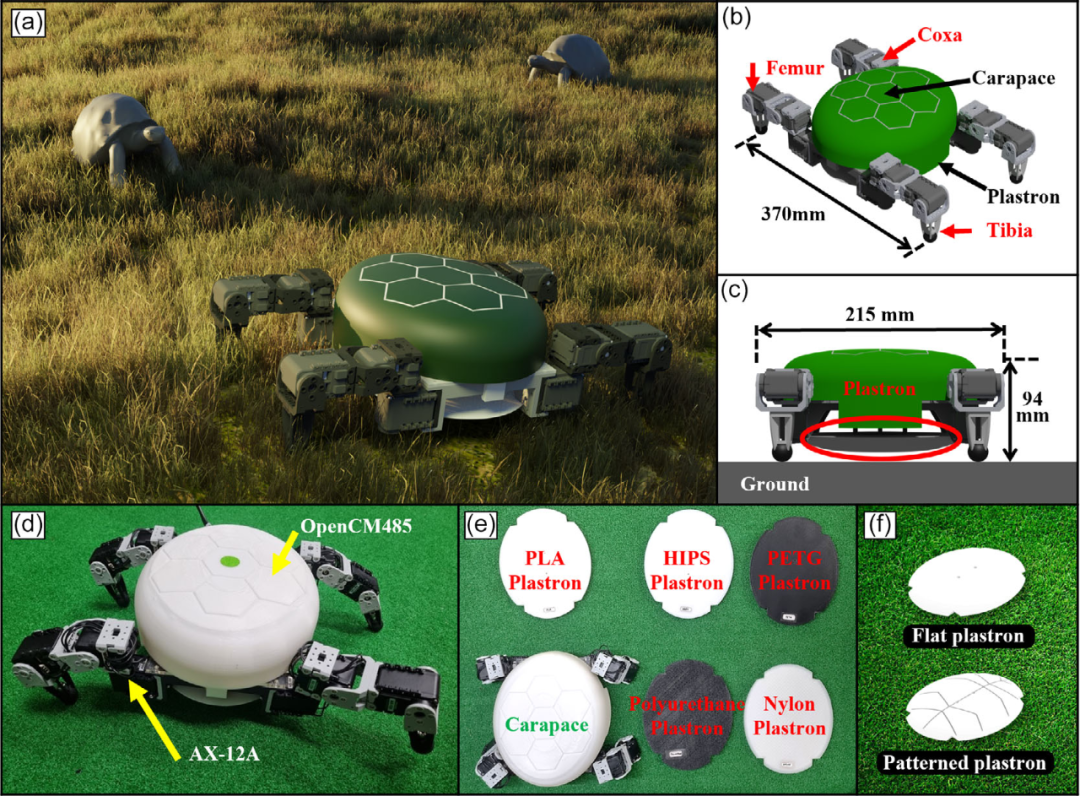
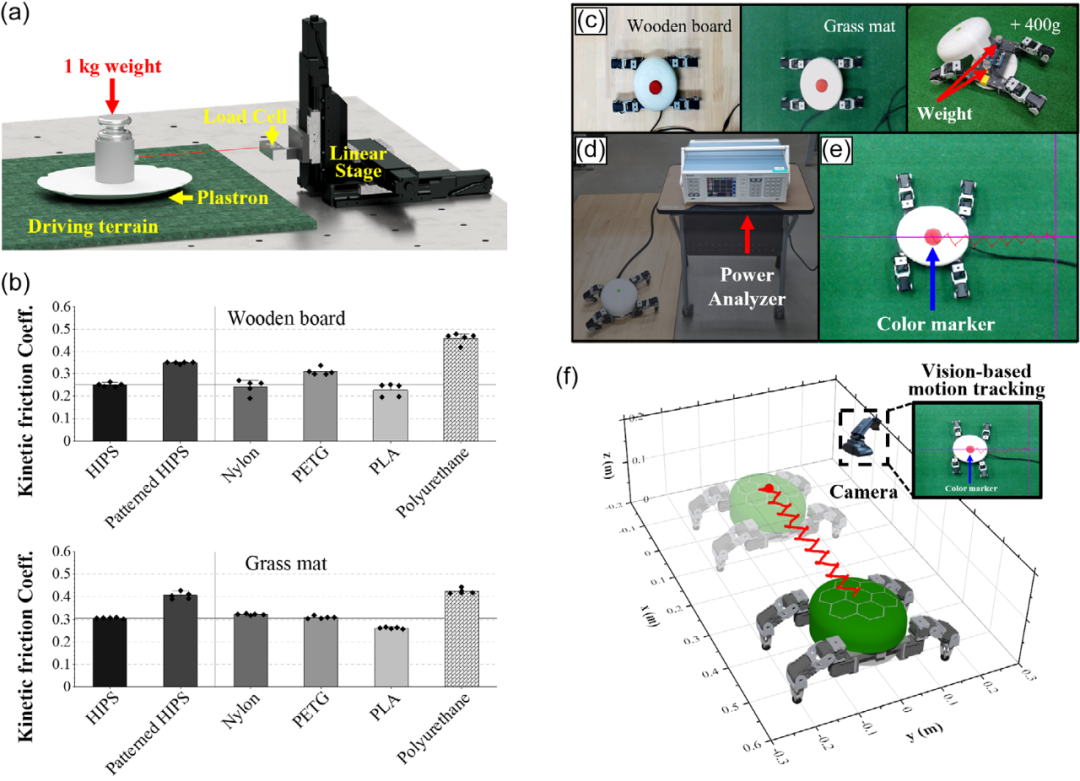
Dongwon Yun教授团队采用3D打印技术制造了四足机器人本体,关节的结构与蔓延姿态均模仿了乌龟的真实形态。为了实现更好的腹部拖动效果,研究团队在机器人底部安装了3D打印的腹甲。在腹甲材料方面,研究团队测试了包括聚乳酸(PLA)、高抗冲聚苯乙烯(HIPS)、改性聚对苯二甲酸乙二醇酯(PETG)、聚氨酯和尼龙在内的多种材料,最终发现发现聚乳酸(PLA)材料具有最低的摩擦系数,因此选择PLA作为制作腹甲的材料。
▍两种运动控制和三种不同姿态的优势与短板
在运动控制方面,研究团队对比了两种典型的四足步态,即三角形步态和对角线步态。
三角形步态,也被称为漫步步态,是一种四足动物常用的步态之一。在这种步态中,四条腿按照特定的顺序逐一移动,形成类似三角形的稳定区域。移动顺序通常是左前腿(LF)→ 右后腿(RH)→ 右前腿(RF)→ 左后腿(LH),形成一个闭环的步态周期。
三角形步态在每一步中至少有三条腿同时接触地面,因此机器人或动物的重心(CoB)能够始终保持在由支撑点形成的三角形稳定区域内。这种步态在低速移动时能够提供很高的稳定性,尤其对于那些肌肉收缩速度较慢、无法快速调整不期望位移的动物(如乌龟)来说尤为重要。
尽管三角形步态提供了良好的稳定性,但其能效相对较低。因为在每一步中,只有一条腿处于摆动相(Swing Phase),而其余三条腿则处于支撑相(Stance Phase),这导致了较高的关节角速度和相对较慢的前进速度。此外,为了补偿重心偏移,三角形步态还需要额外的侧向运动,进一步增加了能耗。
为此,对于四足机器人运动控制来讲,三角形步态或许并不是一个很好的方案。
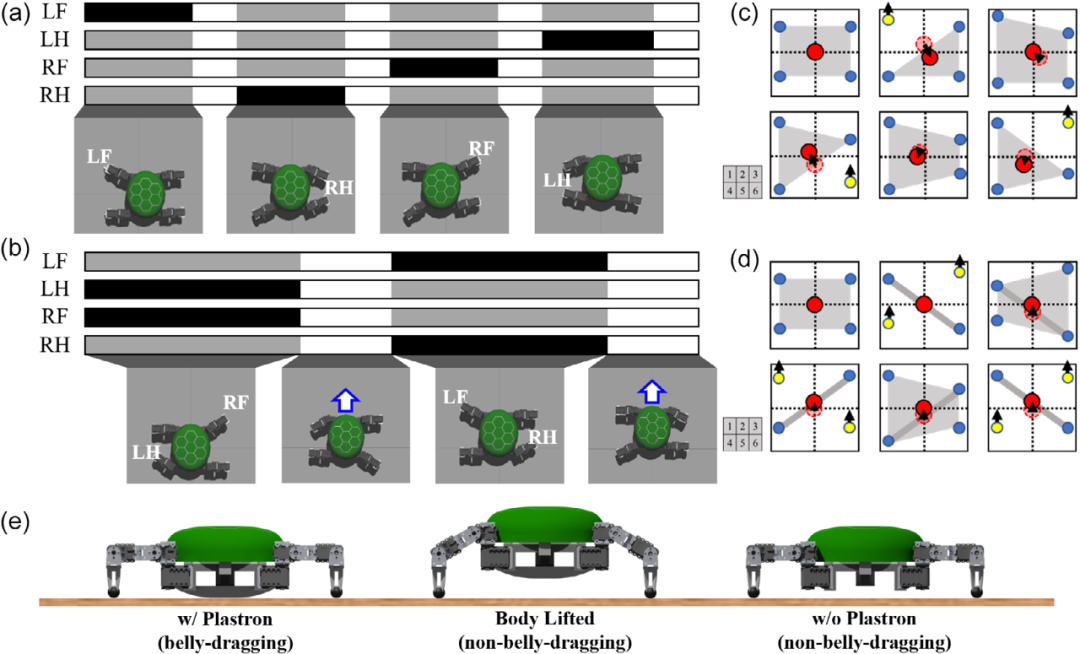
对角线步态,也称为小跑步态,是另一种常见的四足步态。在这种步态中,一对对角线上的腿(如前左腿和后右腿)同步移动,形成直线稳定区域。具体来说,移动顺序通常是左后腿(LH)和右前腿(RF)→ 左前腿(LF)和右后腿(RH),随后重复这一过程。
对角线步态在每一步中通常只有两条腿同时接触地面,但通过合理选择对角线上的腿来移动,机器人或动物的重心能够始终保持在由这两条腿形成的直线稳定区域内。这种步态虽然稳定性略逊于三角形步态,但由于其较高的灵活性和较低的关节角速度,使得在移动过程中能够更有效地利用能量。
整体来看,对角线步态在能效方面表现出色。由于对角线上的腿同步移动,机器人的前进速度更快,同时关节角速度相对较低,减少了不必要的能耗。此外,对角线步态还减少了由于重心补偿所需的侧向运动,进一步提高了能效。
此外,研究团队还讨论了三种不同的姿态对机器人能效的影响,这三种姿态分别是:带腹甲拖动(w/Plastron)、无腹甲拖动(w/o Plastron)和提升身体(Body Lifted)
带腹甲拖动姿态下,机器人通过其底部的腹甲(Plastron)与地面接触,模拟乌龟等爬行动物的腹部拖动行为。腹甲的接触分散了原本施加在腿部关节上的力,减少了关节的扭矩需求,从而降低了能耗。此外,腹部拖动还有助于减少足尖滑移,提高运动的稳定性和效率。
无腹甲拖动姿态下,机器人移除了腹甲,因此不再进行腹部拖动。机器人的腿部需要完全承担体重和推进力,没有额外的支撑点来分散负载。相比带腹甲拖动,其能效显著降低。由于缺乏腹甲的支撑,腿部关节需要承受更大的负载,导致扭矩增加和能耗上升。此外,无腹甲拖动时机器人更容易受到地形不平的影响,导致足尖滑移和不必要的能耗增加。
提升身体姿态下,机器人通过调整腿部关节的角度,将身体提升至一定高度,使得腹甲虽然仍然附着在机器人底部,但不与地面接触。这种姿态模拟了乌龟等爬行动物在不进行腹部拖动时的站立状态。提升身体的姿态在能效方面介于带腹甲拖动和无腹甲拖动之间。由于身体被提升,腿部关节需要承担一定的负载来维持身体平衡,但相比无腹甲拖动,其负载分布更为均匀,扭矩需求相对较小。然而,提升身体也会增加机器人的重心高度,使其在不平地形上更容易失去稳定,且没有腹部拖动的辅助来提高能效。
▍通过动态仿真环境进行测试验证
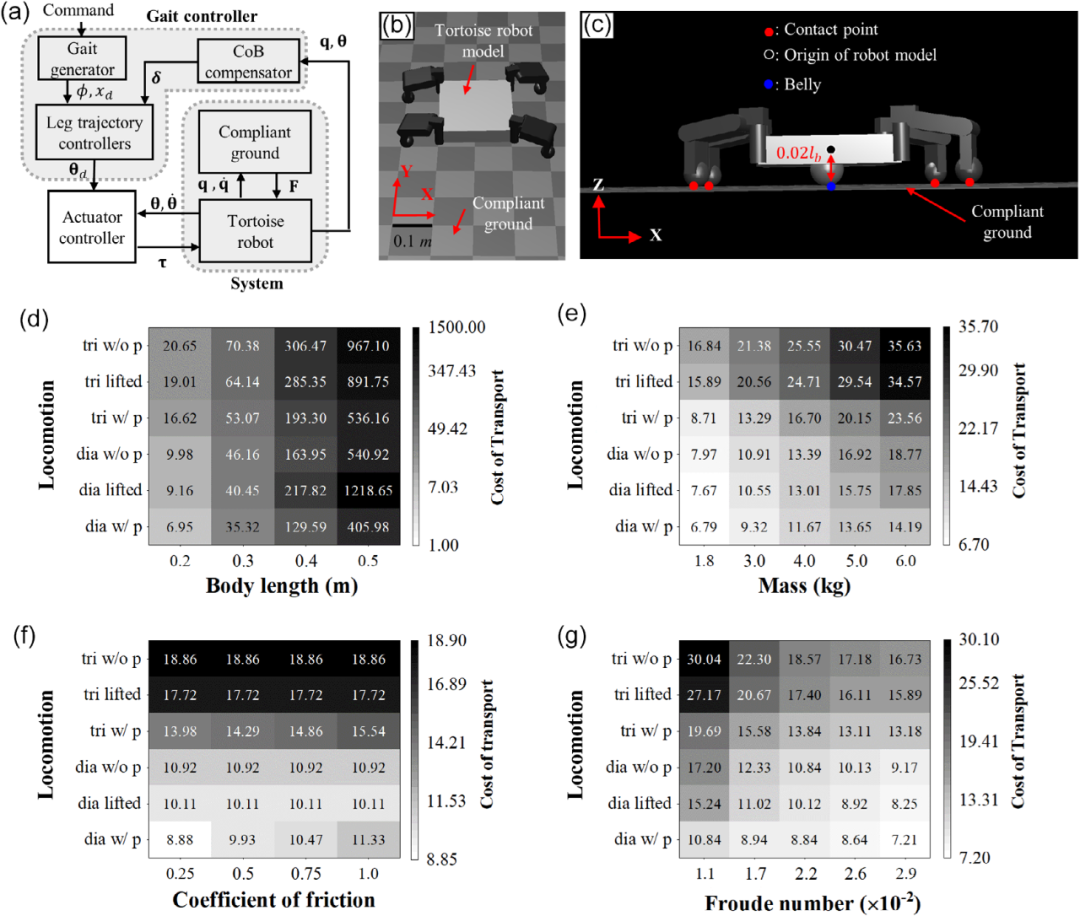
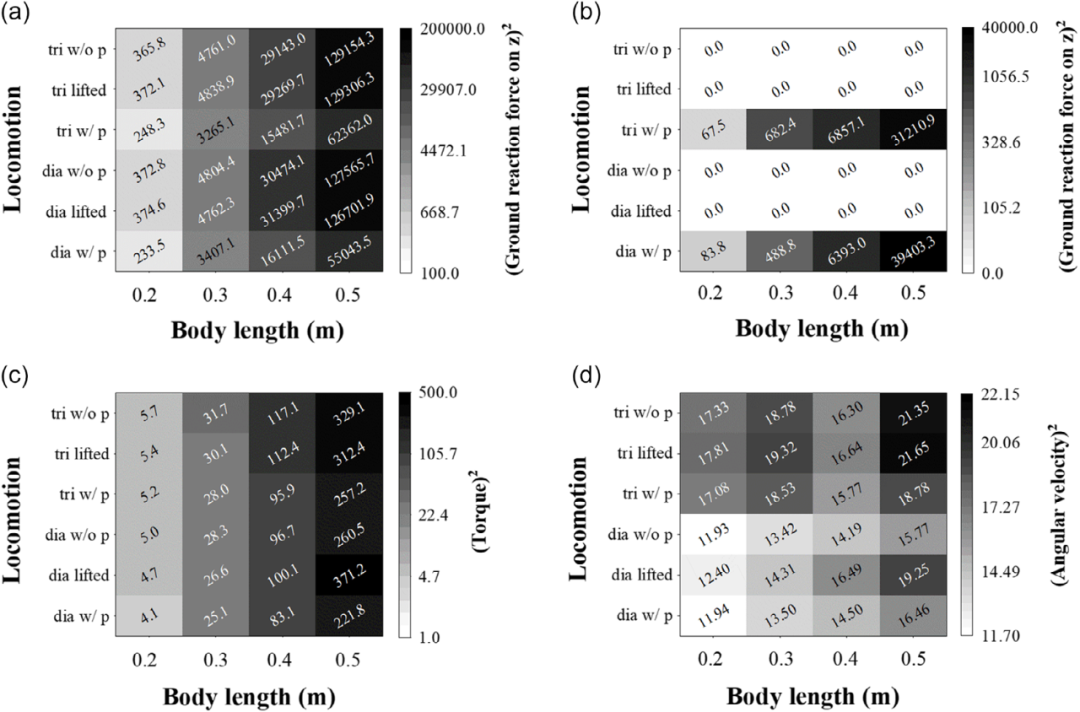
为了更好的验证模仿乌龟步态和腹部拖动对机器人能效的影响,研究人员设计了一系列仿真实验,并且考虑了不同的机器人尺寸、质量、腹甲摩擦系数和Froude数等参数,通过MATLAB的Simulink环境进行展开。
在仿真动态设置方面,动态仿真基于MATLAB的Spatial_v2库进行,该库利用6D空间向量计算动力学,相较于传统的3D向量方法具有计算优势。仿真中,机器人的命令参数(如步态类型和运动速度)作为输入,通过步态生成器、腿部轨迹控制器和重心补偿器组成的步态控制器进行处理,最终计算出所需的关节角度并输入到执行器控制器中。
仿真结果显示,对角线步态相比三角形步态在能效方面具有显著优势,这主要归因于其较低的关节角速度和较高的前进速度。此外带腹甲拖动的姿态通过分散负载和增加稳定性,显著提高了机器人的能效。相比之下,无腹甲拖动的姿态能效较低,而提升身体的姿态则介于两者之间。综合来看,在大多数情况下,对角线步态结合带腹甲拖动的姿态均表现出最高的能效。
▍实际测试验证仿真数据的可靠性
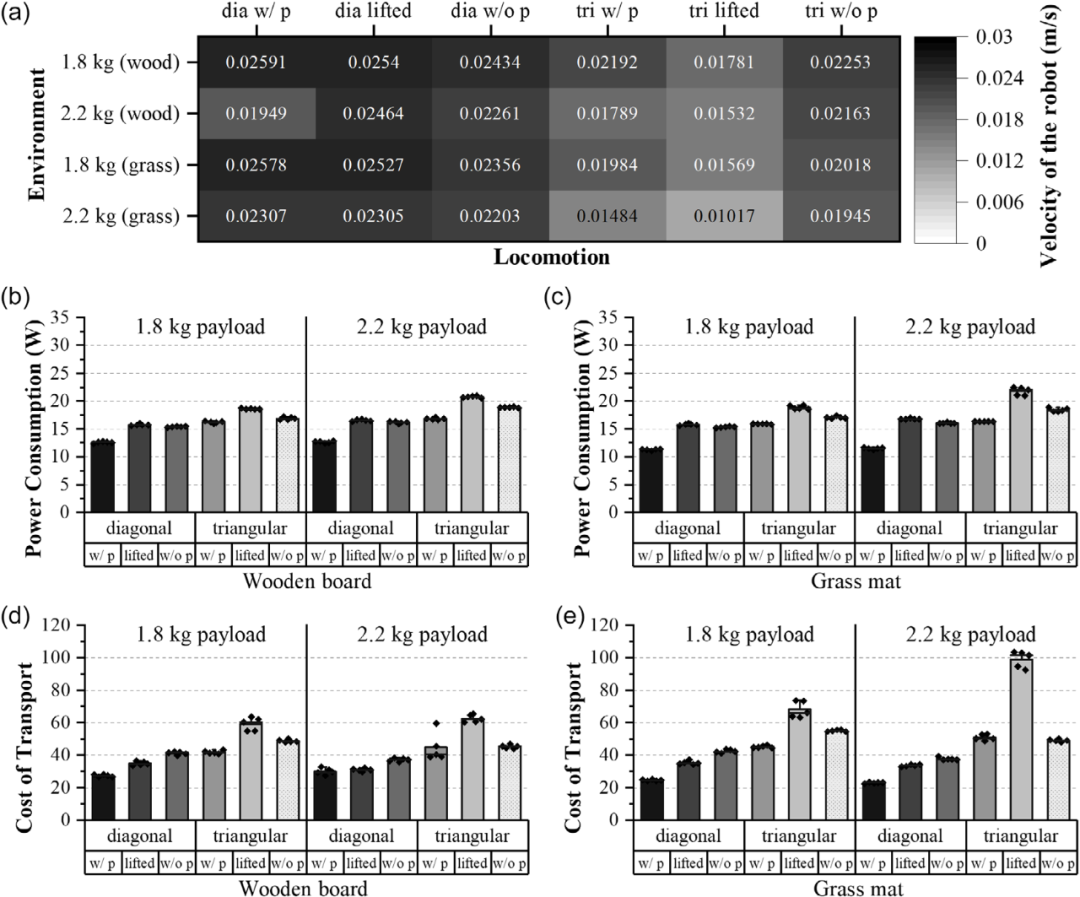
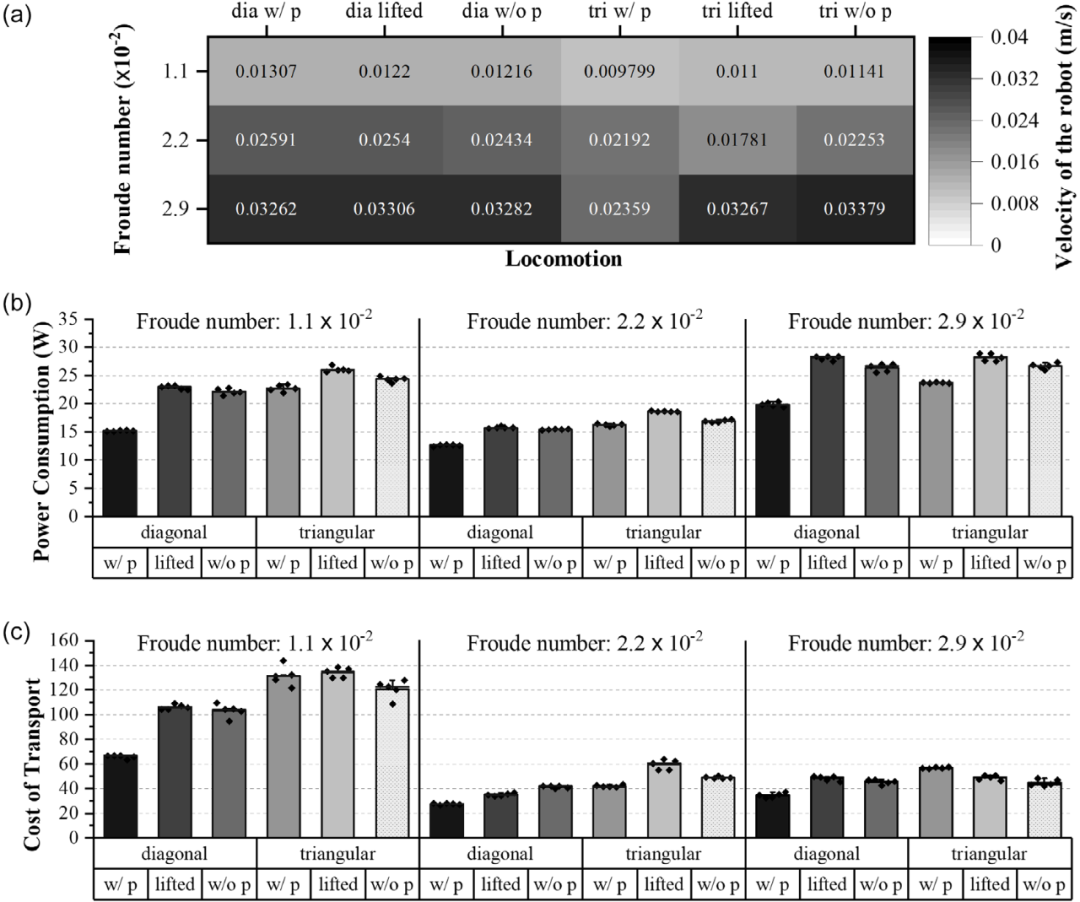
为了验证仿真结果的可靠性,研究团队进行了实际测试。他们在木制板和草地两种不同环境下,测试了机器人在不同载荷和弗劳德数条件下的能效。实验过程中,研究人员使用功率分析仪测量了机器人的功率消耗,并使用视觉分析工具测量了机器人的速度和轨迹。通过计算运输成本,研究人员详细分析了每种运动模式的能效表现。
数据表明,实际测试与仿真结果保持高度一致。即模仿乌龟步态和腹部拖动的对角线步态模式在所有测试条件下均表现出最低的运输成本(CoT)和功率消耗,这一发现也为生物模仿技术在机器人设计中的应用提供了新的思路和方向。



