
还记得那个曾创下百米赛跑世界记录的双足机器人界“博尔特”吗?

它就是Cassie。单个Cassie是跑步冠军,那么当三个Cassie凑到一起,会发生什么?
你以为是超跑阵容?不不不,其实是组团搬砖!
还是得老老实实地搬砖打工(bushi)。
言归正传,多机器人协作可以更好地在复杂环境实现高效、稳定的运输任务。最近,俄勒冈州立大学团队提出了一种分散多双足控制器(decMBC)的架构和训练方法,首次实现了多个双足机器人的有效载荷协作运输!
三个 Cassie 双足机器人一起搬运货物:
转弯 180度:
用力推其中一个,依然稳稳当当:
▍首个可扩展可重构的多双足运输系统
多机器人协作能够克服单个机器人系统的局限性,特别是在处理大型、重型有效载荷等任务中,轮式机器人是一种比较常见的方案,它们易于控制、有效性高、且车轮配置可扩展,但在非结构化的复杂、崎岖地形中就无计可施了。

为了突破该限制,同时保留多轮系统的控制和可重构性,俄勒冈州立大学研究团队提出了“多双足运输”系统,他们的想法是:将车轮或轮式机器人替换为可以任意附着在载体上的双足机器人。这种设置可以实现多机器人系统在各种复杂地形上运输,扩展到更具挑战性的环境。
不过“多双足运输”也是一个巨大的挑战,有腿机器人通常是不稳定且高度动态的,这使它们比轮式机器人更难控制。在运输有效载荷和协调多个有腿机器人的同时保持稳定性,进一步增加了控制问题的复杂性。
为了克服这一挑战,研究团队提出一种叫做分散多双足控制器(decMBC)的架构和训练方法,不限类型、不限配置、不限数量,该方案可以有效地应用于任何双足机器人的高级运动控制上,而且可以任意增加双足机器人数量或配置,无需重新训练,具有高度可适应性、可扩展性、可访问性!
▍分散控制器架构:避免机器人互相通信
先前关于“多双足运输”系统的工作主要集中在基于模型或学习的方法上,这些方法依赖于机器人交互的精确建模和明确的机器人间通信,对系统有很强的假设性,只能实现固定的机器人配置和数量,且受到重量的限制,无法灵活处理更重的负载,限制了“多双足运输”的可扩展性和实用性。
研究团队设计了一种分散的控制器架构,它避免了机器人之间的通信,利用联合电机动作来控制每个机器人控制点的高度、线速度、角速度等。具体架构包括:

神经网络架构:使用循坏神经网络架构来表示 decMBC,该架构允许通过循坏内部记忆进行依赖历史的动作选择。具体来说,网络由两个长短期记忆(LSTM)层组成,每个层包含64维隐藏状态。这些层在每个时间步处理 decMBC输入以形成内部隐藏状态,然后由一个线性层处理,产生一个10维的动作向量,为 Cassie 的每条腿指定5个电机设定值。
训练集生成与学习:使用独立近端策略优化方法 (Independent Proximal Policy Optimization, IPPO)对训练数据集进行4阶段的训练:
第一阶段:只对单个机器人进行训练,目标是学习在其附着点为载体命令操作的鲁棒运动步态。
第二阶段:在载体上添加扰动力和扭力的训练,使机器人能够抵抗扰动力。
第三阶段:在没有任何扭转力的情况下,增加两到三个机器人构型的训练。这一阶段确保每个机器人学会在远离其附着点的随机放置的载体控制点上操作。
第四阶段:除了随机化连接机器人的刚性杆的质量外,还要对机器人的基座和载体施加扭转力。这确保了每个机器人在相对于载体控制点操作时经历扰动力和变化的质量。

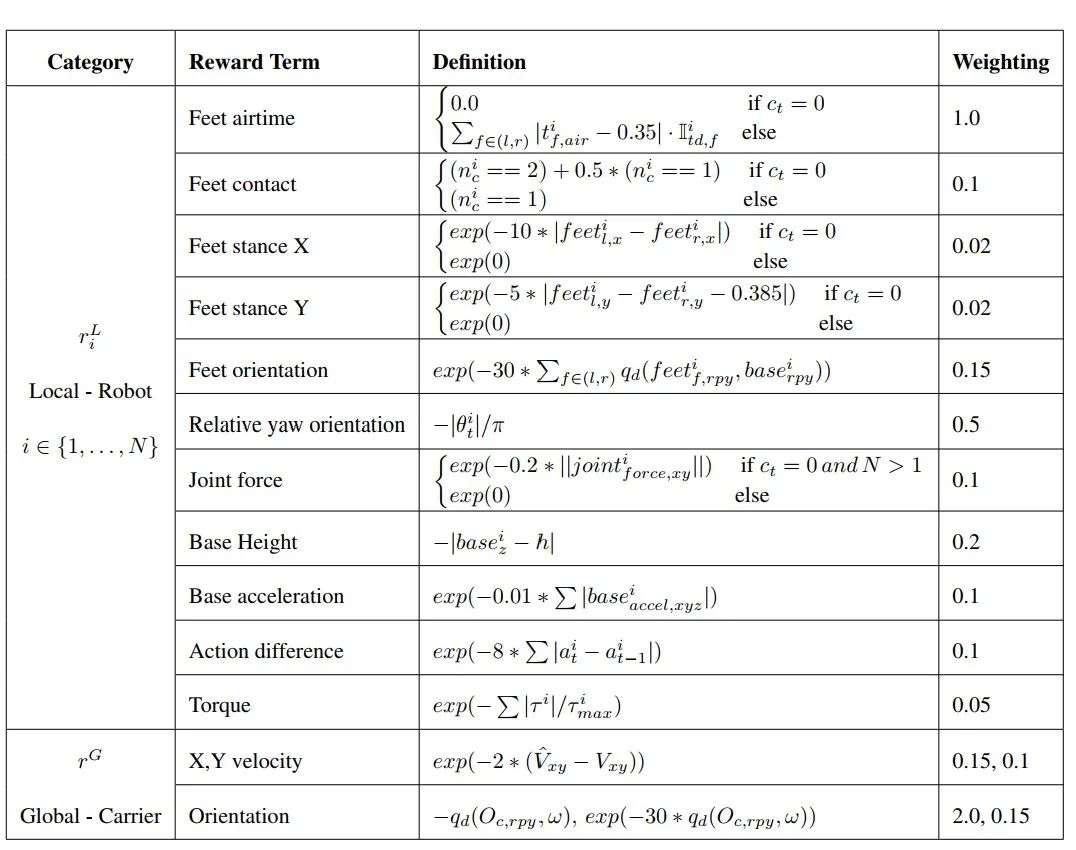
奖励设计:旨在让系统产生稳定的运动行为,同时确保机器人协同遵循载体控制点的命令运动。由两部分组成:局部奖励和全局奖励。
局部奖励用于每个机器人稳定的运动行为,奖励保持一致的基座高度,惩罚机器人的突然运动,规范适当的足部对齐和步进频率。同时,最大限度地减少电机的扭矩,以惩罚过度的能量消耗,并最大限度地减少站立时在载体上的附着点施加的力,确保机器人不会相互拉或推,而是保持载体稳定。
全局奖励关注的是所有机器人在执行载体指令时的联合行动表现,目的是最小化命令与实际的x速度、y速度、角偏航速度和控制点高度等之间的偏差。
▍实证评估:2-10个双足机器人协作任务
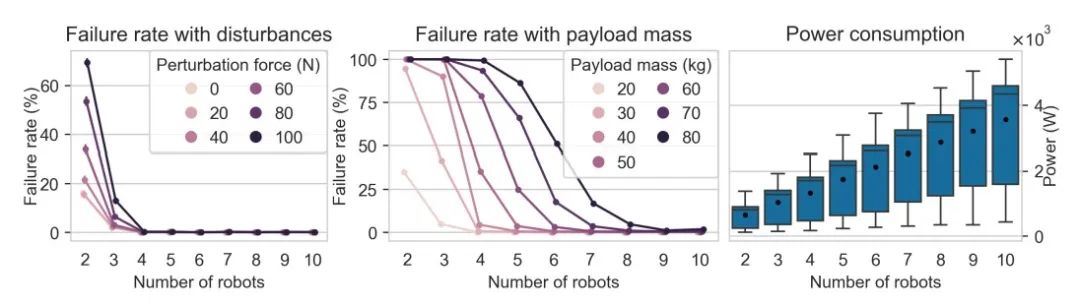
研究团队使用 Cassie 双足机器人平台对decMBC控制器进行了实证评估,在仿真中分别测试了数量从2个到10个的双足机器人协作任务,让它们协作搬运一个矩形载荷。机器人的放置方式确保它们均匀分布,以保持静态稳定性。

在矩形货物搬运测试中,两个机器人在原地测试中表现明显较差,可能是因为两个机器人为矩形载体提供的有限横向支撑导致稳定性降低。随着机器人数量的增加,故障率急剧下降,几乎为零,而功耗随之增加。值得注意的是,功耗与机器人数量近似成线性关系,这表明机器人可以有效地合作,而不会对彼此施加过多反作用力。
除了矩形外,研究团队还在仿真中测试了不同重量的载体(搬运货物),比如麻袋(圆形)、长条木板及原木(圆柱体),展示出了系统保持稳定性、有效协调和适应不同有效载荷运输任务的能力。
在现实环境中,研究团队测试了2-3个Cassie 机器人多足系统,它们被刚性连接在一个重量支架上,还在重量架上增加了有效载荷,用作载体控制点。
▍结语与未来
这项研究由俄勒冈州立大学的协同机器人与智能系统(CoRIS)研究所提出,文章预发表在arxiv上,标题为“Learning Decentralized Multi-Biped Control for Payload Transport(负载运输的分散多双足控制学习)”
“多双足运输”系统突破了目前多轮式机器人系统在复杂地形运动的限制,实现了多双足机器人系统的稳定运行、有效协调,可适应不同有效载荷等功能。重要的是,该方法可以灵活配置不同类型和数量的双足机器人,大大增加了系统的灵活性和可扩展力。研究人员表示:这是第一个在模拟和现实世界中展示这种可重构性水平的多足运输系统。
不过,该系统目前仅在平坦表面上进行了仿真和测试,虽然理论上双足机器人穿越复杂地形的能力很强,但还需要进一步验证。另外,decMBC的仿真结果显示了多达10个机器人的可扩展性,但真正从仿真走到现实世界的只有2-3个Cassie 机器人,更多数量的机器人协作运输任务也需要进一步验证。
除此之外,decMBC控制器目前完全依赖本体感觉传感和相对机器人位置,而没有纳入额外的传感模式或解决自主导航和高层决策挑战。研究团队计划未来将decMBC与感知、规划和控制模块集成,进一步增强其在复杂环境中的能力。



