
由弹性材料构成的连续体机器人,不仅能承受连续变形,还可在复杂环境中自如移动,凭借其灵活性、柔韧性和高度交互安全性,在医疗和工业应用等多个领域展现出巨大应用潜力和广阔市场前景,也因此成为研究热点。
然而,这一新兴技术也面临着不小的挑战。连续体机器人的控制技术目前仍处于探索阶段,许多技术难题尚待解决。由于这类机器人结构的特殊性,如何为其开发出精准高效的控制算法,已成为行业发展的关键所在。为了实现连续体机器人的最优性能,研发一套有效、精确且稳定的控制系统显得尤为重要。
▍聚焦HCR,提出BPAC控制系统
当前,连续体机器人控制所面临的挑战主要有两方面:一是传统的控制方法往往难以达到理想的任务空间性能,例如在收敛时间和误差控制方面存在不足,且通常需要进行繁琐的参数微调;二是由于机器人种类的多样性,开发一个通用的控制系统变得异常复杂,不同的机器人可能需要不同的控制模型,这无疑增加了研发的成本和时间。
针对这些问题,来自中山大学的研究团队对异构连续体机器人(HCR)的任务空间行为和通用控制进行了深入研究。近日,他们成功研发出一种新型控制器,这种控制器能够实现对连续体机器人的精确运动控制和视觉伺服,而且无需进行繁琐的参数调整。同时,该研究还创新性地融合了速度级运动学映射估计器,成功构建了一个无模型的控制系统,从而进一步提升了控制的自适应性和灵活性。此外,该研究团队还提出了一个可重新调整的性能函数,以确保在外部干扰存在的情况下,所提出的控制系统的有效性和鲁棒性。
与以往多数研究不同,该团队的研究焦点并非局限于特定机器人的设计、感知、建模和控制,而是放眼于各类HCR的通用运动控制。这一研究视角的转变,不仅拓宽了连续体机器人控制技术的应用范围,也为行业带来了新的思考维度。
值得一提的是,该研究首次引入了PPC理论到连续机器人的任务空间控制中,实现了理论应用的创新。同时,为增强控制系统的稳定性和抗干扰能力,团队还创造性地提出了新的性能函数,对PPC理论进行了精细化处理。

该研究成果的相关论文以“Behavior-predefined adaptive control for heterogeneous continuum robots”为题发表在《International Journal of Robotics Research》上。论文第一作者为中山大学计算机学院副教授谭宁。该研究成果不仅为连续体机器人的控制技术发展提供了新的思路,也为相关领域的研究者提供了宝贵的参考和借鉴。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍行为预设控制器
在过去的研究中,连续体机器人的运动控制方法主要可以分为基于模型、自适应和数据驱动三类。
尽管这些方法各有优势,但也存在明显不足。自适应方法虽能快速适应不同的机器人平台,但多数仅在单一机器人上进行了验证,缺乏广泛适用性的研究。而基于模型或数据驱动的方法,虽在某些连续机器人上进行了测试,但其通用性和性能仍有待提升。
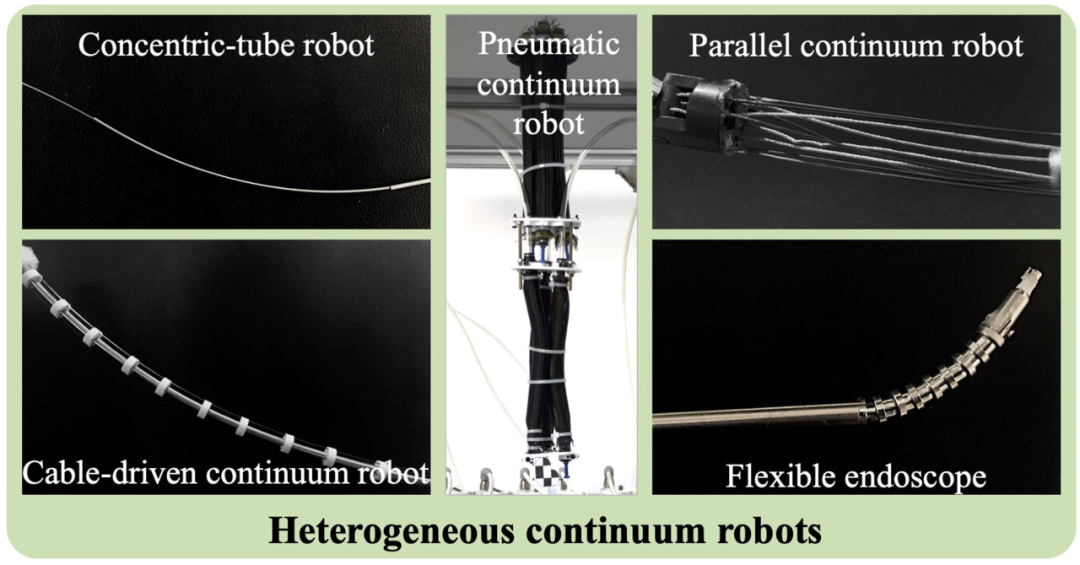 异构连续机器人示意图
异构连续机器人示意图
尽管构型空间PPC已有研究,但任务空间PPC的探索尚属空白。为达到预期的任务空间性能,现有控制方法往往需要精细调整控制或建模参数。部分研究能设定任务空间误差的收敛时间,然而对瞬态误差和稳态误差的关注却寥寥无几。
为弥补现有方法的不足,该研究团队创造性地提出了一种全新的通用控制系统——BPAC系统。BPAC系统的显著优势在于其任务空间性能的可预定义性以及对各类连续体机器人的迅速适配能力。用户在利用BPAC系统操作连续体机器人前,仅需预设期望的性能参数。
在构建BPAC系统时,研究团队首先设计了行为预设控制器。此控制器旨在使连续机器人在执行运动任务时精确达到参考点或轨迹,并在预定时间内完成任务。
为实现这一目标,团队运用了允许用户规定瞬态误差收敛速率和边界的性能预置控制(PPC)理论。鉴于现有的PPC方法多适用于无外部干扰的理想状况,而连续机器人易受外部负载或环境交互引起的形变影响,团队引入零化动力学方法,利用传感器反馈估算模型信息,以此消除模型不确定性。团队通过该方法初始化和适应机器人的未知雅可比矩阵,以优化运动控制。
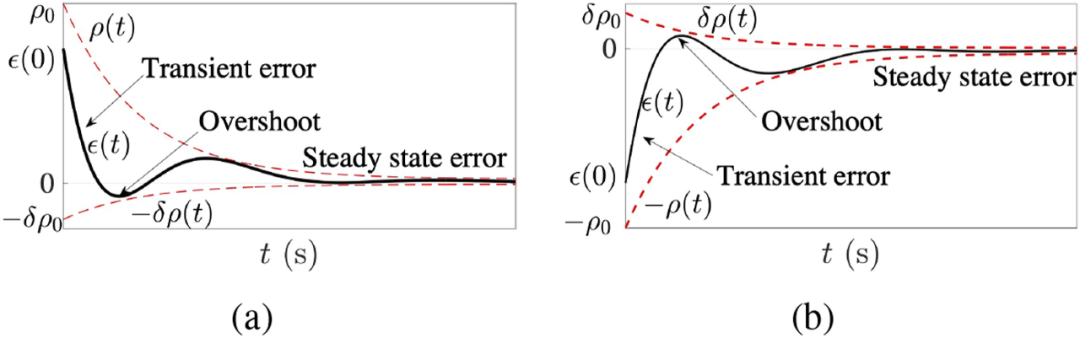
预设跟踪误差图示。(a)非负初始误差ϵ (0) ≥ 0的情况下的预设性能。(b)负初始误差ϵ (0) < 0的情况下的预设性能
此外,通过结合简单的初始化步骤和零化动力学模型,团队简化了控制器的操作,避免了复杂建模和不确定性问题。最终,该控制器实现了对连续体机器人进行精确的运动控制和视觉伺服操控,可让用户预先设定机器人的任务行为和性能,同时确保驱动信号满足空间约束,保护机器人的驱动器。
▍速度级运动学映射估算器
在机器人技术领域,连续体机器人的运动控制一直是研究的难点。这类机器人在与外部负载交互或处于多变环境时,常会发生难以预测的形变,使得传统的基于预设模型的控制方法难以应对。
无模型或自适应的控制策略利用传感器实时反馈来估算模型信息,并动态调整控制参数,从而巧妙地解决了模型不确定性带来的困扰,也因此备受研究者的青睐。
在本研究中,为了摆脱对机器人精确模型信息的依赖,研究团队巧妙地引入了零化动力学方法,对连续体机器人的速度级运动学模型进行了精准估算。零化动力学,这一特地为解决各类时变问题而设计的技术,能够深入分析系统的动态特性,进而准确预测并掌控机器人的运动状态。
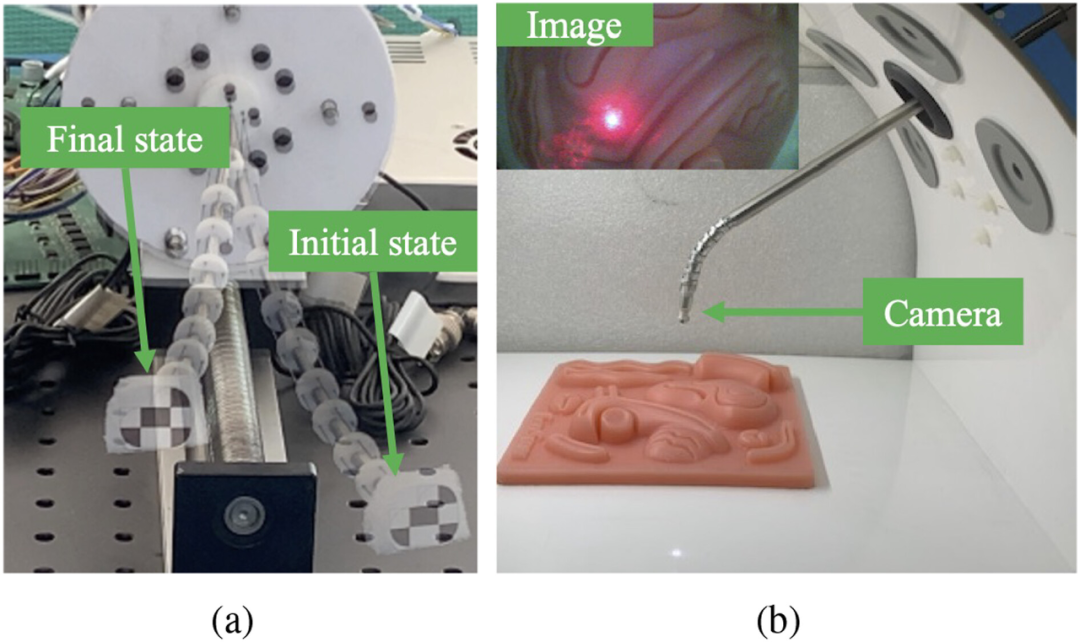
(a)绳驱连续机器人的运动控制。(b)柔性内窥镜的手眼视觉伺服
在实施过程中,研究团队首先明确定义了任务空间和驱动空间的状态向量,并给出了前向运动学模型的形式。该模型能够清晰地揭示驱动状态与机器人末端执行器位置和方向之间的复杂非线性关系。紧接着,通过计算任务空间速度向量相对于驱动状态向量的导数,得出了实现自适应控制不可或缺的雅可比矩阵的表示方法。
在实验验证环节,研究团队利用实际的驱动输入和任务空间输出数据来精确初始化雅可比矩阵,以确保其准确性。考虑到执行任务过程中机器人的形变引起的雅可比矩阵变化,他们采用零化动力学方法在线估计和调整雅可比矩阵的估计值。
最终,在零化动力学理论的指导下,通过定义任务和驱动空间状态向量、建立前向运动学模型、推导速度级运动模型,模型初始化以及在线更新等一系列精心设计的步骤,研究团队成功地估算出了连续体机器人的速度级运动模型。这一重要成果使得他们能够精准预测并有效控制连续体机器人在执行任务时的运动状态。
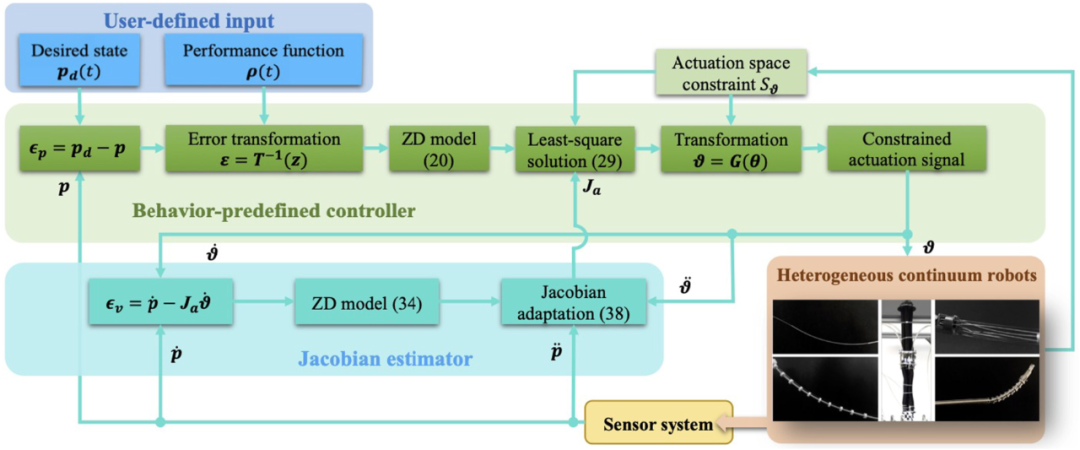
针对异构连续机器人提出的行为预定义自适应控制(BPAC)系统图
通过将新型控制器与速度级运动学映射估算器相结合,研究团队成功开发出了一种高效的无模型控制系统。这一系统不仅降低了对精确机器人模型信息的依赖,更通过实时反馈和调整模型参数,显著提升了控制系统的自适应能力和灵活性,为连续体机器人在复杂多变环境中的应用开辟了新的可能。
▍可重新调整的性能函数RePF
为了提高控制系统的稳定性、鲁棒性以及对外界干扰的抵御能力,研究团队还提出了一种全新的可重新调整的性能函数RePF。这一函数的引入,有效确保了任务空间误差能够维持在RePF所设定的边界之内。
传统的性能函数如指数性能函数(EPF)虽然在理论上能够使任务空间误差指数级收敛到某个上界,但在实际应用中,由于任务执行时间有限,EPF需要的时间过长,显得不切实际。而预定义时间性能函数(PPF)虽然能够直接规定性能函数和任务空间误差收敛到任意小值所需的时间,但在面对不确定性和外部干扰时,其性能往往大打折扣。
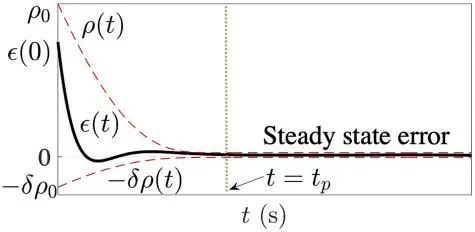
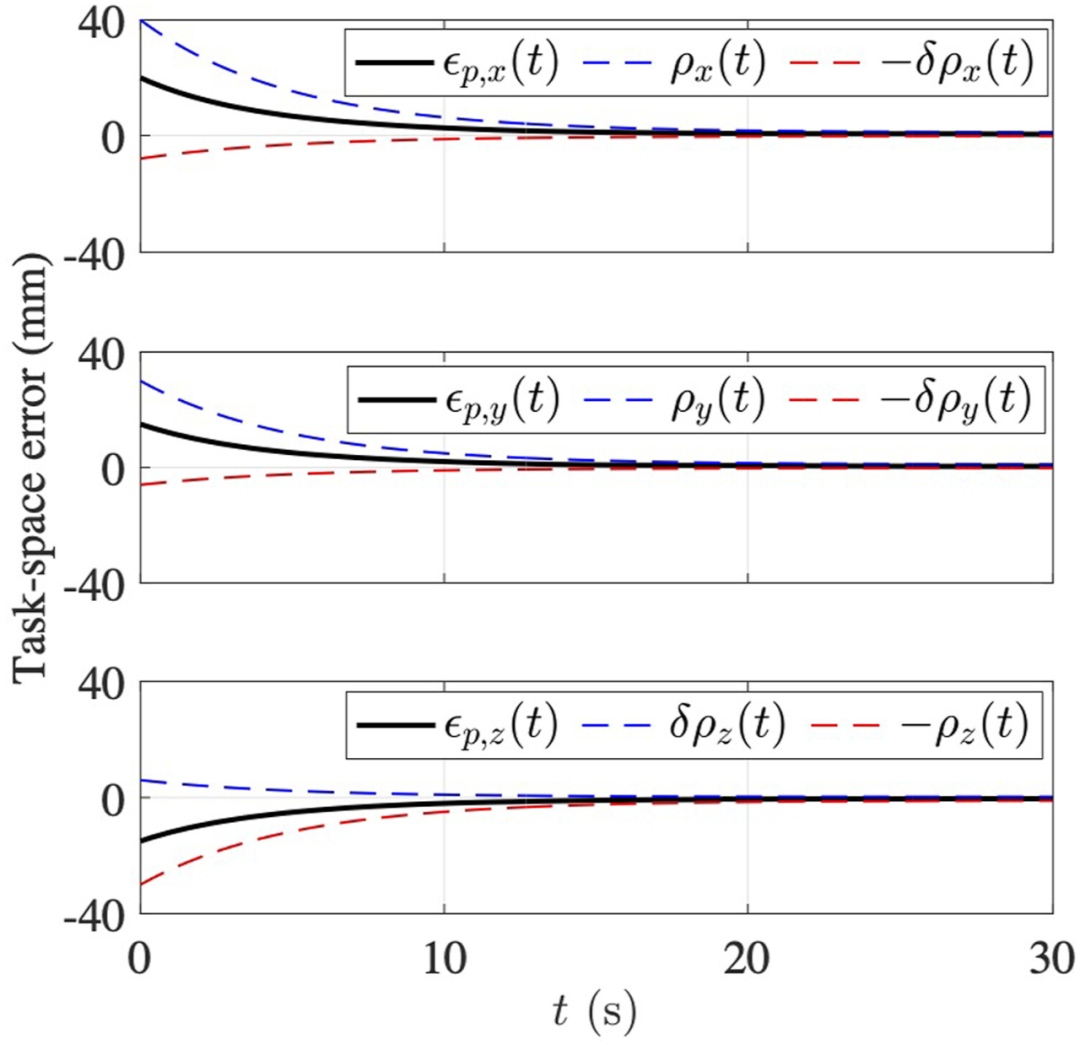
具有预定义时间收敛的预设性能控制说明。任务空间误差ϵ ( t ) 不仅符合性能函数ρ ( t ),而且在预定义时间t p之前收敛到稳定状态。
为了克服这些局限性,研究团队创造性地提出了RePF。该函数结合了PPF与任务空间误差的一个调整项,实现了对性能边界的动态调整。这种设计不仅使得RePF能够像软边界约束一样工作,还有助于在存在干扰的情况下,确保控制系统的收敛性和鲁棒性。具体而言,RePF能够在干扰发生时重新调整其约束边界,确保任务空间误差始终保持在设定的边界内,有效避免了控制失败的风险。
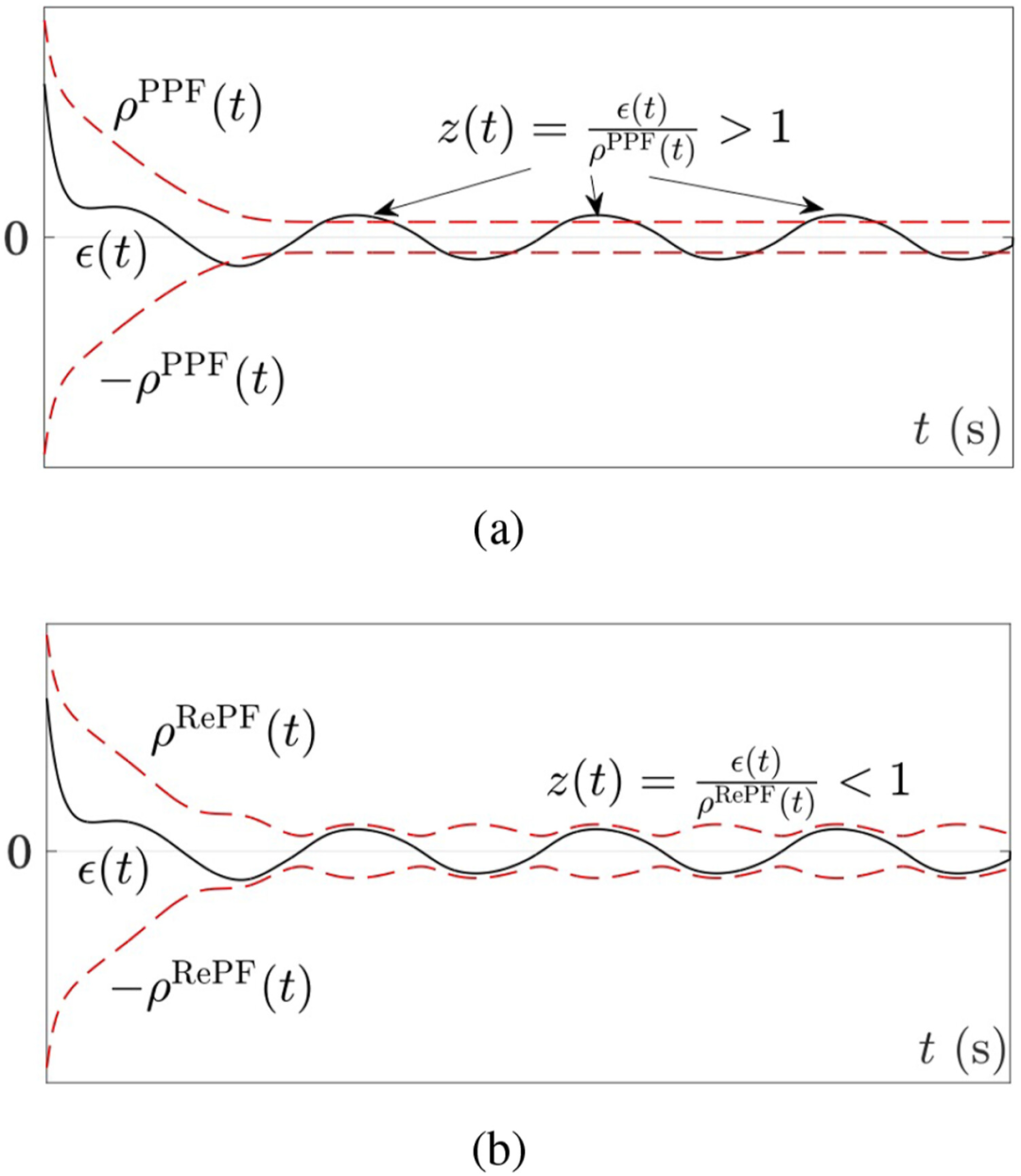
正弦扰动下性能函数说明。(a) 采用PPF时,误差ϵ ( t )可能会超出PPF的边界,导致z ( t )>1。在这种情况下,z ( t )超出了T -1的定义域,从而导致误差转换和控制器失败。(b) 采用提出的RePF时,调整边界以确保z ( t )<1,从而保持误差转换函数T -1是良定义的
作为一种创新的性能函数,RePF通过动态调整性能边界,显著增强了机器人控制系统在面对外部干扰时的稳定性和鲁棒性,为机器人技术在复杂多变环境中的应用提供了强有力的支持。
▍BPAC控制系统可行性测试
为了验证所提BPAC控制系统的有效性,研究团队进行了一系列详尽的实验验证。
在初步测试中,研究团队采用基于PCC理论的仿真机器人,对雅可比矩阵自适应法则的效能进行了评估。他们控制一个两段式连续型机器人(CCR)执行圆形路径跟踪任务,并对比了有无雅可比自适应的情况。实验结果显示,在无自适应法则的情况下,机器人末端执行器的实际运动轨迹与参考路径存在显著偏差;而启用自适应法则后,机器人能够精确地沿参考路径移动。
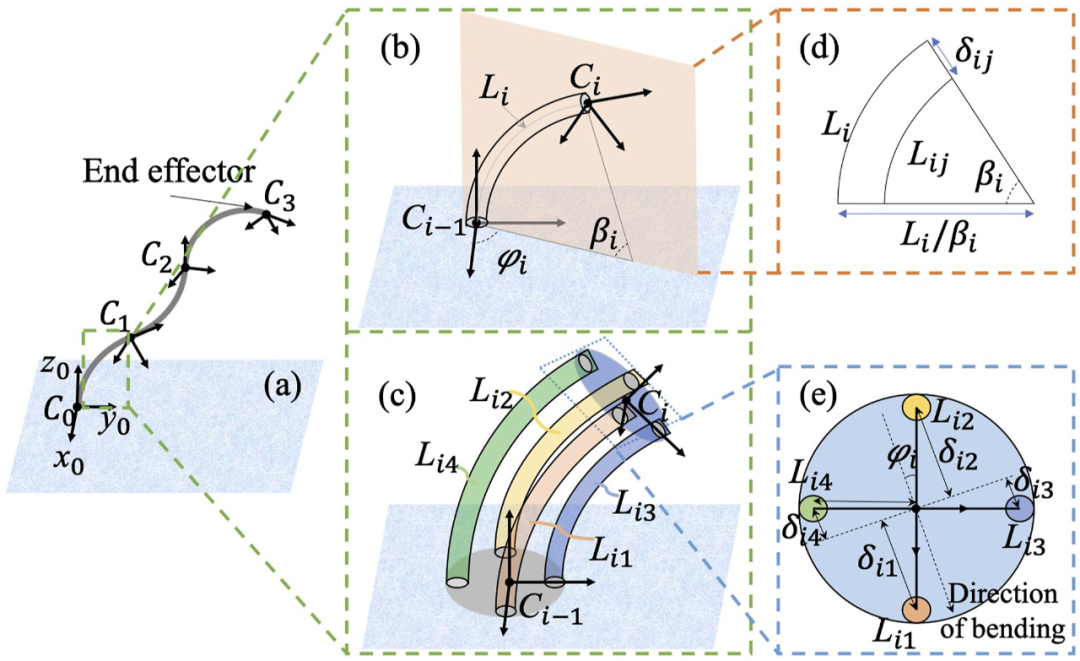
基于改进的分段常数曲率软机器人状态参数化的CCR模型说明
为进一步探究控制频率对实验结果的影响,团队在仿真环境中以不同的控制频率操控CCR完成五角星路径跟踪任务。实验数据表明,降低控制频率会导致收敛时间延长、末端执行器速度减缓以及残差误差增大。此外,低频控制还削弱了系统对显著外部干扰的处理能力,使得任务空间误差在受到干扰后的恢复速度变慢。
模拟研究中执行五角星路径跟踪任务的连续机器人的一些构型
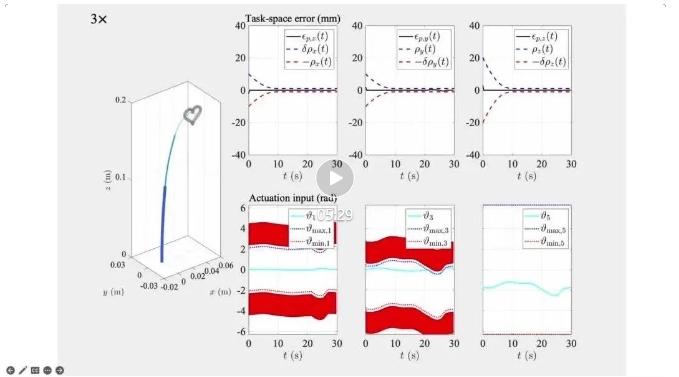
在具体的一项实验中,CCR被要求在工作空间内用其末端执行器追踪一个五角星路径。任务持续180秒,控制频率为10Hz。通过采用预测性能滤波器(PPF),并设定10秒的收敛时间,实验结果显示性能函数和任务空间误差均在预期内的10秒内收敛至设定值。值得一提的是,末端执行器沿参考路径的稳态误差小于2毫米,这一结果有力证实了BPAC控制系统在实现连续型机器人预定任务空间性能方面的可行性。
在模拟研究中执行五角星路径跟踪任务时 CCR 的指数性能函数 (EPF) ρ ( t ) 和任务空间误差ϵ p ( t ) 的曲线
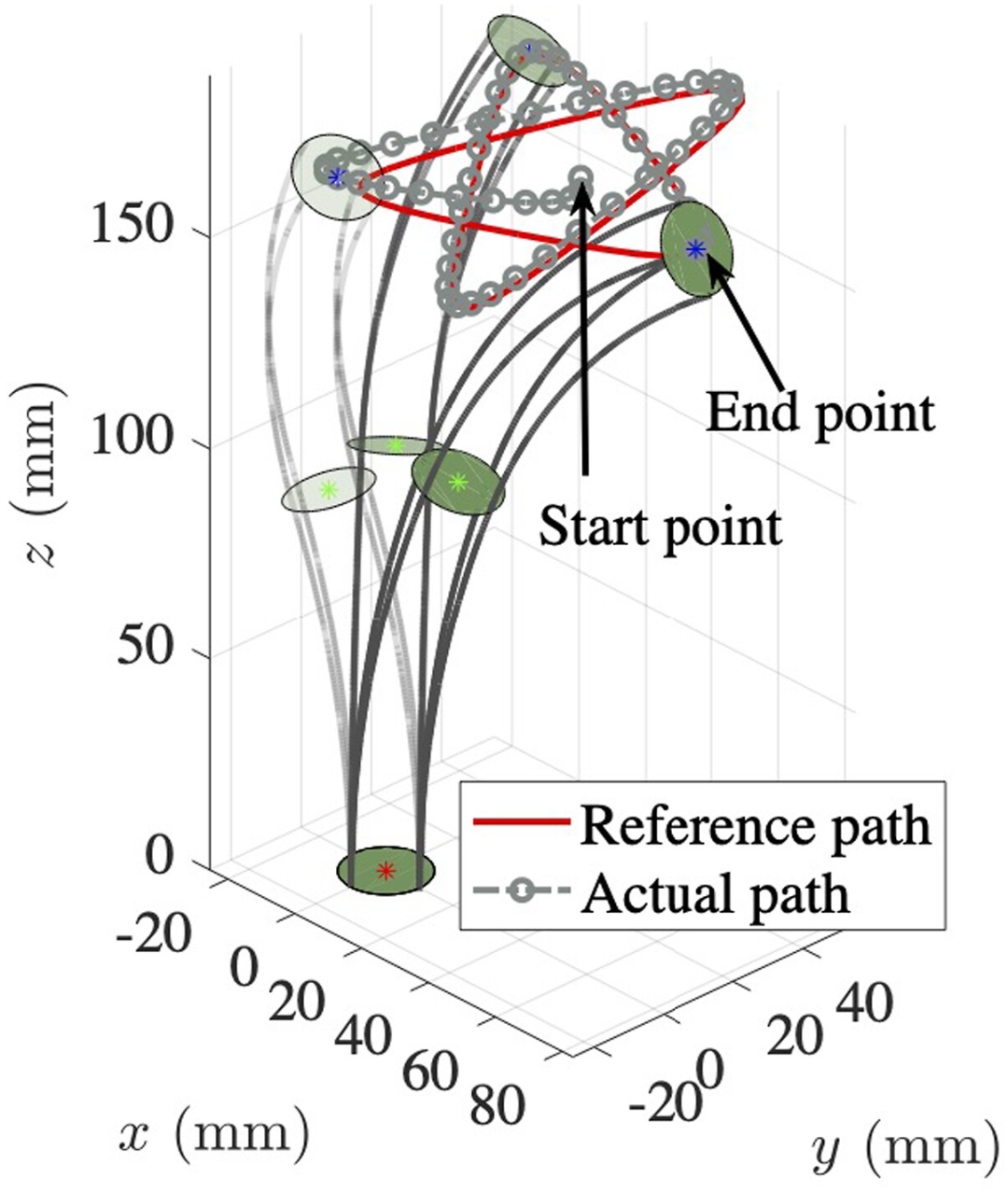
最后,为验证BPAC控制系统在实际应用中的表现,研究团队在实验室环境下使用五种不同类型的HCRs进行了物理实验。实验装置包括机器人、高精度相机以及个人电脑。通过相机精确测量机器人末端执行器的位置,并在10Hz的控制频率下进行操作。实验结果表明,控制系统能够有效应对信号传输延迟和计算开销,实现高效的控制。此外,雅可比矩阵的初始化过程极为迅速,可在数秒内完成,进一步提升了系统的实用性。
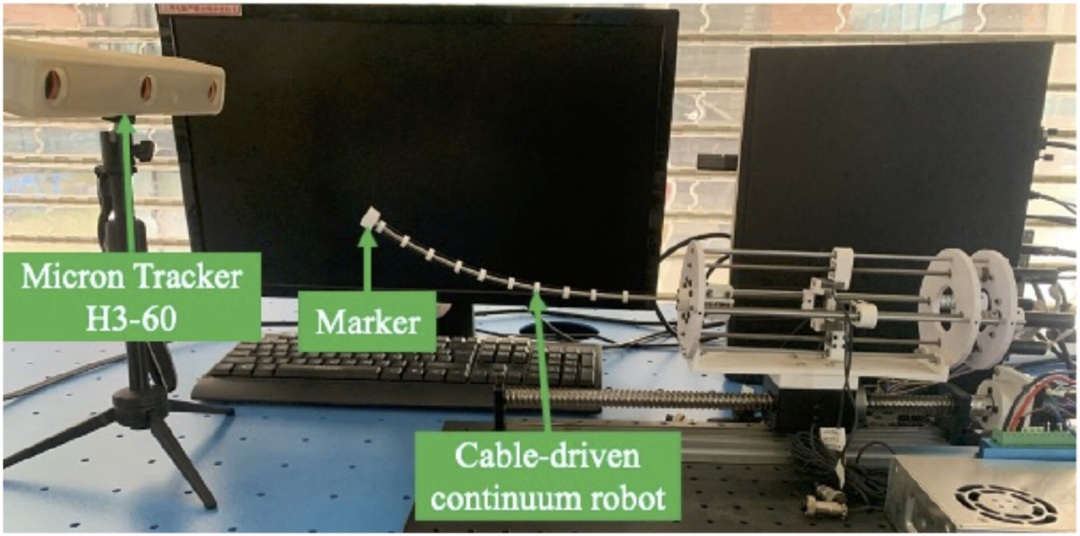
绳驱连续机器人实验平台
通过一系列严格的实验验证,研究团队成功证实了BPAC系统及其雅可比矩阵自适应法则的可行性与高效性,为连续型机器人在复杂任务中的精确控制提供了有力支持。
参考文章:
https://doi.org/10.1177/02783649241259138



