
6月20日,中国煤科机器人公司在深圳举办“粤港澳具身智能机器人中试基地”启用与产业生态建设大会--暨第二届“特种机器人产业链”榜单榜主工作推进会--暨《煤矿安全规程》修订专题“基于巡检机器人条件的瓦斯检查工优化配备总体技术方案”论证会圆满成功。上午日程安排主要是揭牌仪式及机器人、榜单榜主工作推进等主题报告环节,下午是“基于巡检机器人条件的瓦斯检查工优化配备总体技术方案”论证会。

参会领导有国家矿山安全监察局党组成员、副局长周德昶,中国煤炭科工集团党委副书记、总经理赵永峰,原中国矿业大学(北京)校长、中国工程院院士葛世荣,深圳市工业和信息化局副局长林毅,中国煤炭工业协会副会长刘峰,国家矿山安全监察局广东局党组书记、局长冯国祥,国家矿山安全监察局政策法规和科技装备司(正司局长级)监察专员张文杰,国家矿山安全监察局广东局党组成员、副局长唐际华,重庆大学教授胡千庭,深圳市福田区副区长余枫,深圳市河套深港科技创新合作区深圳园区发展署副署长余杰,深圳市工业和信息化局装备工业处处长王文华,华为技术有限公司矿山军团副总裁陈文丰,国家安标中心原副主任杨大明等。会上,周德昶、赵永峰、林毅分别致辞。
会议同时进行了“粤港澳具身智能机器人中试基地”、河套具身智能机器人中试平台,清华大学共建研究生专业实践基地,国家机器人检测与评定中心(重庆)共建矿山机器人标准及检测技术联合研究中心,中电海康集团小微特机器人联盟-特种机器人联合实验室,深圳市人工智能产业协会共建矿山人工智能产业基地等揭牌仪式。
▍主题报告环节
王雷研究员做《煤矿机器人2.0路径思考》分享。王雷提出了应将煤矿机器人发展过程分阶段探讨,首次提出煤矿机器人进入到2.0阶段的概念,并对煤矿机器人1.0阶段进行了解析,对2.0阶段的发展路径思考做详细阐述,同时介绍了机器人公司在2.0阶段具体研究进展,在行业发展、央地协同共建等方面提出了规划与展望。

王雷指出,煤矿机器人1.0阶段,产品、技术、重点单元以及产业链方面都已经有所进展,具体表现为:巡检类机器人具备了自主移动、自主感知、部分自主决策;辅助作业类机器人从无到有,部分井下应用,但实用性不高;救援类机器人:关键技术及整机并未攻克;技术体系还不成熟,开发混乱,没有形成通用产品平台;机器人底盘、固定场所导航等技术较成熟,AI视觉识别、运控、长距离导航等技术还尚未攻克;管控平台仅能实现少量同构、异构机器人任务调度、运维管理等集群管控;梳理出上下游产业链,形成产业链图谱、供应链图谱,以及核心技术清单;缺少已经发布的国家标准和行业标准,检测检验能力缺失;已经吸收部分高水平科研人员进入煤炭行业,煤矿机器人从业单位约115家。自此,煤矿机器人完成1.0阶段,行业初步诞生,绝大部分产品实现从无到有,生产厂家逐渐增加。
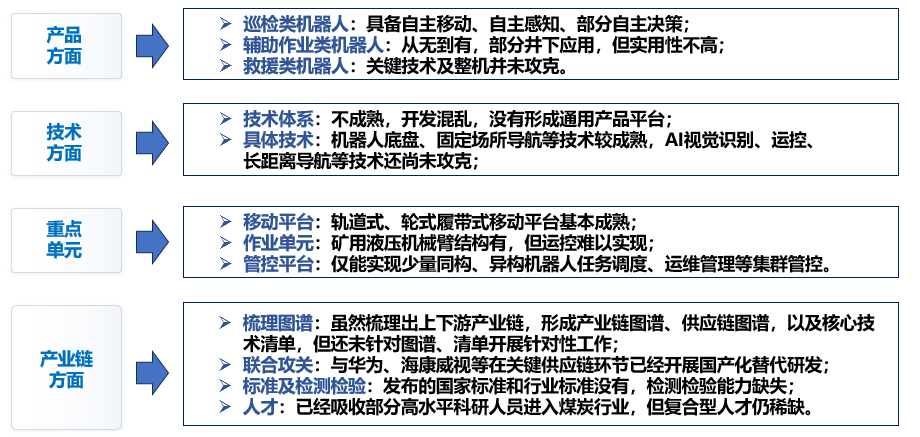
1.0阶段基本特征总结
机器人公司在1.0阶段也针对“煤矿机器人是什么?煤矿机器人有什么问题?煤矿机器人路径怎么走?”等问题进行了深度思考,成立第一个“机器人+”行业组织,第一个发布煤矿机器人分级体系,形成了多项煤矿机器人引领性认知,在技术、产品、人才等方面迅速积累了大量丰富成果。针对本体可靠性及环境适应性提出煤矿机器人十大共性技术;在核心零部件、软件技术机器人化的应用工艺等方面进行了共性堵点卡点分析;研制出了7种、22款巡检类机器人,6种、12款辅助作业机器人,已在百余家煤矿现场取得应用。
总结1.0阶段行业核心问题发现,虽已部分应用,但产品凌乱、技术离散,产业链不健全,检测检验能力急需提升,人才匮乏。巡检类机器人智能化水平、长期可靠性及品质亟待提升,AI、大模型等技术未能充分在煤矿场景下应用;辅助作业类机器人设计理念和技术脉络尚未清晰,基础理论与工艺性关键技术尚未突破;煤机机器人智能化路径不清晰,受限于传统思维进展缓慢,没有有效和人工智能企业及机器人企业相结合;供应链薄弱,产业链不完善,标准及检验检测规范等缺失,测试基地、中试基地缺失,既懂煤矿、又懂机器人的中高端研发人才严重供给不足。
王雷指出,煤矿机器人的移动机构(脚)、执行机构(手)、感知系统(眼耳口鼻)的机构和功能方面已经在1.0阶段完成,2.0阶段重点要解决的是运动控制、手脚协同、自主作业、感知精度、信息调用和智能决策的问题,因此,提出具身智能煤矿机器人。
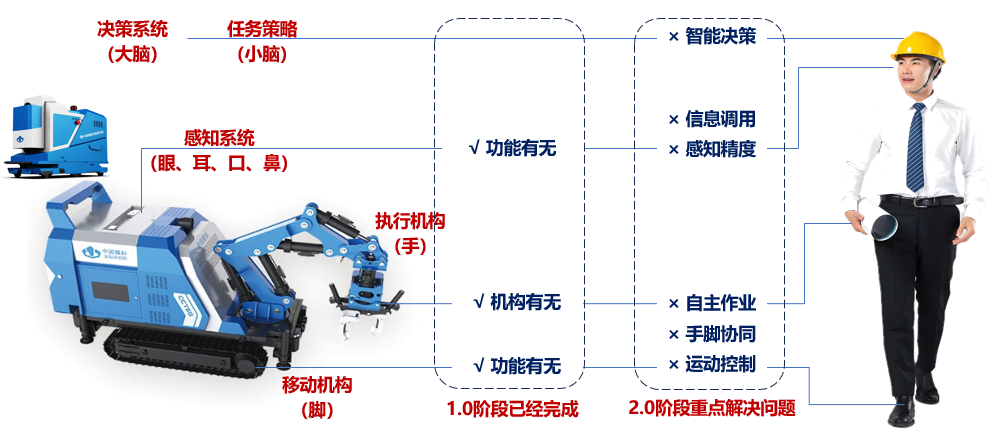
2.0阶段的煤矿机器人应参考法规、环境、工艺等要素,加快决策系统(大脑)和任务策略(小脑)的开发,在感知、决策、作业、移动等多维度实现智能化。“离线自主、在线智能、数据融入、行为管理”是2.0阶段煤矿机器人系统的重要特征,机器人实现自主感知决策与作业后,嵌入矿上生产系统、安全管理系统、及信息管理系统,并能够与其他智能设备及其他厂家机器人形成联动,真正实现打通全矿井数据信息,精准化管理。
王雷总结了2.0阶段完成时应具备的特征:具身智能矿山机器人基本成型,更高的稳定性和智能化水平,更强的操作性能和融入系统的能力;产业链供应链初具规模,产品被大多数客户接受;用户量增长迅速。其中,重点分析了巡检机器人和辅助作业机器人进入2.0阶段应具备的特征。巡检类特征主要体现在覆盖场景更多、感知要素更全,续航里程和可靠性大幅提升,AI技术机器人化实现场景应用,具备推理决策能力,任务部署更加便捷,任务可配置,不断融合传统煤矿法规条例,人机交互性更强。辅助作业类特征主要体现在本体能力和可靠性更强,具身智能体系完成,多臂协同、车臂协同、人机交互能力更强,具备作业效果评价与自学习训练能力,工艺上下游任务配置能力提升。
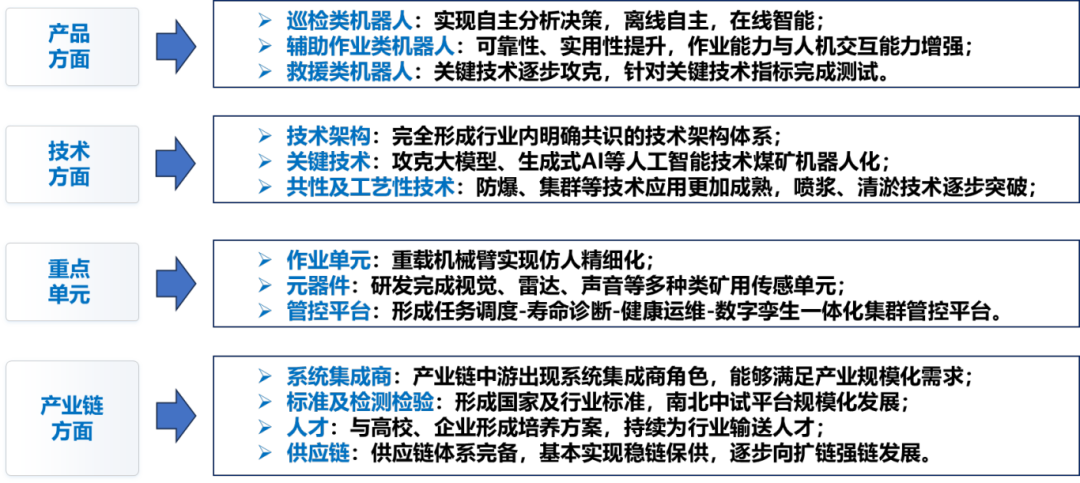
2.0阶段完成时特征
机器人公司2.0阶段具体的研究进展主要体现在巡检和辅助作业两类机器人的产品、技术、元器件方面。巡检类机器人方面,主要解决了“为什么都觉得巡检机器人没用”的问题,重点成果包括瓦斯巡检机器人重定义、高精准实时动态巷道三维建模技术、机器人化巡检大模型研究、机器人自诊断与任务可编辑技术研究、轻量化非金属轨道、巡检消防机器人研发等方面。王雷指出,随着煤矿智能化进程加速,井下必然会有越来越多设备智能化,需要大量人员进行巡检,也就需要大量巡检机器人替人;机器人可实现灵活抵近观察,检测精度、认知理解、分析决策能力更智能,巡检类机器人未来应该蓬勃发展!辅助作业机器人方面,主要解决了“大家都认为有用,但为什么现在不好用的问题”,通过将工艺解耦为机器人技术,逐步攻克了喷浆机器人、水仓清淤机器人等现场使用过程中的问题,提出了对应解决方案;基于国家重点研发计划“智能机器人” 重点专项——大型煤矿井下巷道辅助作业机器人关键技术与应用示范项目,构建完成了打钻、抓管、冲尘、清理4种机器人6种参数化工艺模型。
机器人公司在2.0阶段,首次发布面向行业的煤矿机器人通用技术架构;在本体、AI、感知技术作业单元、任务策略及仿真4个技术领域,设置导航、视觉、音频、三维重建等17条技术线;提出人工智能加持下煤矿机器人工艺性技术的十大方向;申报三项国家标准项目,包括地下矿山用机器人通用安全要求、通用技术条件和实验方法;与国家机器人检测与评定中心(重庆)合作,成立联合研究中心;基于承担的国家重点研发计划“智能机器人专项”制定辅助作业机器人测试标准,真正推动煤矿机器人行业的煤矿安全标准和机器人行业的正规检验标准深度结合。在深圳-沈阳两地都开展了中试基地建设,打造煤矿机器人产业根基。
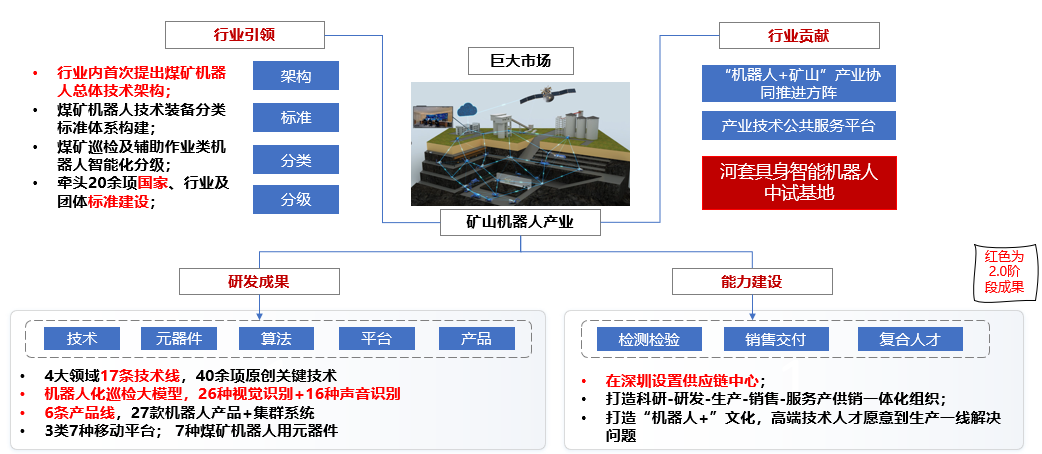
2.0阶段体系成果一览图
会议同步召开了工信部、国防科工局、国务院国资委、深圳市人民政府联合举办的第二届特种机器人产业链“揭榜”活动——矿山机器人榜主工作推进会,中国煤科机器人公司科创中心主任朱玉芹做主题报告。从活动背景、揭榜情况、榜主工作推进情况及下一步计划等多方面,讲解了机器人公司承担的榜单榜主工作开展情况,并发布了矿山机器人产业链图谱。
▍《煤矿安全规程》修订专题“基于巡检机器人条件的瓦斯检查工优化配备专题工作方案”论证会
机器人公司前期开展了大量工作,调研了64家煤矿企业,进行了系统性论证,于行业内首次提出了全系瓦斯巡检机器人替代方案。本次会议邀请相关部委领导及行业顶级专家进行论证,并安排下一步工作,进一步夯实《煤矿安全规程》修订工作基础。

2023年9月,受国家矿山安全监察局委托,中国煤科机器人公司牵头论证修订的《煤矿安全规程》方案中有关巡检机器人替代瓦检员部分;2023年10月,中国煤科机器人公司接到国家矿山安全监察局发布的“关于开展煤矿安全规程修订工作调研的函”;2024年2月,国家矿山安全监察局发“关于开展巡检机器人替代瓦检工部分工作试点的函”,同意中国煤科机器人公司在陕西、山西等3处煤矿开展巡检机器人替代瓦检工部分工作的试点。
机器人公司作为官方指定的牵头单位,高度重视规程修订工作,制定了详细的专题工作方案,设立专题工作领导小组,领导小组下设方案编制小组和3个应用试点项目组,确保项目按照既定的目标、战略和计划进行。同时,基于踏勘调研进行了全系瓦斯巡检机器人系统性梳理,提出了从需求解读到瓦检机器人重定义,从试点煤矿实施方案到测试与应用评价,最终提出规程修订意见的总体工作流程。
机器人公司作为最早开始规划瓦检员替代工作的单位,从2023年7月起就进行了大量踏勘与调研工作。项目组赴安徽、山东、新疆、山西、陕西、内蒙古等区域共计64家煤矿进行了实地调研和深入的研究,并对陕西榆林、内蒙古鄂尔多斯等地各类巡检机器人应用较为广泛的13处煤矿进行了实地重点调研。
机器人公司于行业内首次提出全系瓦斯巡检机器人解决方案,结合试点煤矿实际场景和管理现状,按“一矿一策”的具体要求,制定了详细的试点煤矿现场实施方案。
与此同时,在保障巡检机器人出厂测试及产品现场应用过程中的测试及评价准确性方面,与国家机器人检测与评定中心(重庆)合作,成立联合研究中心,制定瓦斯巡检机器人测试标准,对机器人功能、性能、稳定性进行验证,并针对数据时效性、准确性、完成性的传输分析和管理进行验证,以及所有报警机制、风险辨识等进行测试验证。
领导及专家组听取了专题汇报后,经过质询和讨论后,同意通过该工作方案。周德昶局长和赵永峰书记进行了总结讲话,对机器人公司所做的工作为《煤矿安全规程》相关条款的修订提供了强大的数据和技术支撑,对机器人公司的历史贡献表示肯定,并对下一步工作做出指示。
中国煤科机器人公司将加快专题实施进度,尽快提出对规程相关条款的修订建议,持续引领矿山机器人产业变革,为解放井下百万矿工生命财产安全做出贡献。



