
 想象一下,如果能把多个无人机连成一串,像龙一样在空中自由弯曲,会是什么样子?
想象一下,如果能把多个无人机连成一串,像龙一样在空中自由弯曲,会是什么样子?
这就是空中骨骼系统的基本概念。它结合了多旋翼技术和机械臂的优点,创造出一种前所未有的飞行形态。
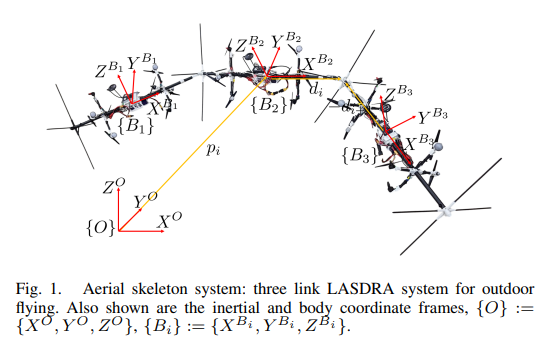
 韩国首尔国立大学的研究团队最近在这个领域取得了新的突破。他们开发的LASDRA系统不仅能稳定飞行,还能在空中实现复杂的姿态变化。
韩国首尔国立大学的研究团队最近在这个领域取得了新的突破。他们开发的LASDRA系统不仅能稳定飞行,还能在空中实现复杂的姿态变化。


还能平稳着陆!

这为高空作业、搜救任务,甚至太空探索带来了新的可能。
如此灵活如蛇,稳定如鹰的飞行系统,是怎么做到的?
▍飞天骨骼的姿态估计有多难?
虽然空中骨骼系统看起来很炫酷,但要实现它的精准控制可不是件容易的事儿。尤其是在室外飞行时,系统的姿态和位姿估计就成了一个巨大的挑战。
 为什么这么说呢?首先,为了最大化系统的灵活性,大型分布式旋翼驱动空中骨骼系统采用缆绳连接两个链节。这样可以实现链节之间完全的3自由度旋转,但同时也给测量带来了困难。
为什么这么说呢?首先,为了最大化系统的灵活性,大型分布式旋翼驱动空中骨骼系统采用缆绳连接两个链节。这样可以实现链节之间完全的3自由度旋转,但同时也给测量带来了困难。
传统的编码器难以准确测量这种大范围的旋转,因此LASDRA系统选择在每个链节上安装IMU(惯性测量单元)来估计姿态。
 但是IMU估计的链节绝对姿态误差会随着时间累积,并且会沿着骨骼系统向末端传播,最终导致链节位置估计产生很大的误差。这对系统控制来说是个大问题。因为如果骨骼系统要保持某个特定姿态飞行,就需要将这个目标姿态分解为每个链节的位置和姿态控制。
但是IMU估计的链节绝对姿态误差会随着时间累积,并且会沿着骨骼系统向末端传播,最终导致链节位置估计产生很大的误差。这对系统控制来说是个大问题。因为如果骨骼系统要保持某个特定姿态飞行,就需要将这个目标姿态分解为每个链节的位置和姿态控制。
如果链节位置估计误差太大(比如骨骼链节数量很多时),就可能导致链节位置控制出现过大偏差,与自身或相邻链节的姿态/位置控制相冲突,最终可能导致骨骼系统崩溃坠毁。
那么在每个链节上加装GNSS(全球导航卫星系统)模块来修正位置估计误差是不是个好主意呢?可惜这也不太靠谱,因为普通GNSS的精度太差(误差在米级),还是无法满足空中骨骼系统对运动一致性的要求。
那么研究人员是如何解决这个难题的呢?让我们继续往下看!
▍超强算法来帮忙,飞天骨骼不再"手足无措"
面对空中骨骼系统姿态估计的挑战,韩国首尔国立大学的研究团队提出了一种新颖的姿态和位姿估计框架。他们的方法是这样的:
 首先,在每个链节上都安装IMU传感器和GNSS模块,利用标准的SE(3)运动扩展卡尔曼滤波(EKF)来估计各链节的状态。这种分布式的传感器配置可以让骨骼系统具有"模块化"特性,同时通过冗余/独立的GNSS传感器显著提高位置感知精度。
首先,在每个链节上都安装IMU传感器和GNSS模块,利用标准的SE(3)运动扩展卡尔曼滤波(EKF)来估计各链节的状态。这种分布式的传感器配置可以让骨骼系统具有"模块化"特性,同时通过冗余/独立的GNSS传感器显著提高位置感知精度。
然后,将空中骨骼系统的运动学约束(即通过缆绳连接的两个链节之间的点约束)应用到所有链节的EKF估计结果中,以确保运动学的一致性,从而显著提高估计精度。
为了实现这一点,研究团队采用了平滑约束卡尔曼滤波(SCKF)框架。在SCKF中,非线性约束被线性化并作为带有一些人工噪声的测量更新重复应用。相比其他约束卡尔曼滤波技术,SCKF在约束误差收敛性能方面表现更为出色,这对于确保骨骼系统的运动学一致性至关重要。
研究团队还对标准SCKF进行了扩展,以适应多维运动学约束、误差状态公式和SE(3)运动估计中常见的流形结构。
 不仅如此,为了解决当链节数量变得非常大时的可扩展性问题,研究团队还设计了一个半分布式版本的估计算法。该算法将骨骼系统划分为若干组,在每组内部执行完整的SCKF,在组与组之间执行部分SCKF,从而大大提高了计算速度。
不仅如此,为了解决当链节数量变得非常大时的可扩展性问题,研究团队还设计了一个半分布式版本的估计算法。该算法将骨骼系统划分为若干组,在每组内部执行完整的SCKF,在组与组之间执行部分SCKF,从而大大提高了计算速度。
这套估计框架不仅解决了姿态估计的难题,还兼顾了系统的可扩展性。这样一来,飞天骨骼就不会"手足无措"了。
▍实验结果大揭秘,飞天骨骼初露锋芒
那么,这套算法在实际应用中效果如何呢?研究团队进行了仿真研究和真实的室外飞行实验来验证他们的理论。
 首先是仿真实验。研究团队对不同链节数量的空中骨骼系统进行了仿真,以验证他们提出的半分布式算法的可扩展性。结果显示,随着链节数量的增加,半分布式算法的计算时间增长速度明显慢于集中式算法。这意味着,对于大规模的空中骨骼系统,半分布式算法可以更高效地进行姿态估计,为实时控制提供了可能。
首先是仿真实验。研究团队对不同链节数量的空中骨骼系统进行了仿真,以验证他们提出的半分布式算法的可扩展性。结果显示,随着链节数量的增加,半分布式算法的计算时间增长速度明显慢于集中式算法。这意味着,对于大规模的空中骨骼系统,半分布式算法可以更高效地进行姿态估计,为实时控制提供了可能。
更令人兴奋的是真实的室外飞行实验!研究团队使用了一个由三个链节组成的LASDRA系统进行测试。他们将系统悬挂在一个大型起重机上,模拟不同的飞行场景。实验结果令人振奋:
姿态估计精度大幅提升:与单纯使用EKF相比,加入SCKF后的估计框架显著提高了系统的姿态估计精度。尤其是对于末端链节的位置估计,误差减小了近80%!
运动学一致性得到保证:实验中,即使在系统进行大幅度运动时,各链节之间的相对位置关系也能够很好地保持,证明了算法在确保运动学一致性方面的有效性。
控制性能明显改善:基于更精确的姿态估计,系统的控制性能也得到了显著提升。在跟踪预设轨迹时,系统表现出更高的稳定性和准确性。
抗干扰能力增强:在模拟外部扰动(如风力)的情况下,采用新算法的系统表现出更强的鲁棒性,能够快速恢复到期望姿态。
 这些实验结果无疑给了研究团队一剂强心针。它们不仅验证了理论的正确性,更证明了这套姿态估计框架在实际应用中的巨大潜力。
这些实验结果无疑给了研究团队一剂强心针。它们不仅验证了理论的正确性,更证明了这套姿态估计框架在实际应用中的巨大潜力。
▍未来展望: 飞向更广阔的天空
从最初的固定翼飞机到如今的多旋翼无人机,人类对飞行器的探索从未停止。空中骨骼系统的出现,无疑为这个领域注入了新的活力。它打破了传统飞行器的界限,为我们展示了一种全新的飞行概念。
 那么,这项技术未来可能会有哪些应用呢?让小编来畅想一下:
那么,这项技术未来可能会有哪些应用呢?让小编来畅想一下:
想象一下,一个灵活的飞天"机械臂"在摩天大楼外墙上自由穿梭,进行清洁、维修或安装工作,是不是比传统的吊篮方式更酷炫;在矿井、隧道或管道等狭长空间中,空中骨骼系统可以像"蛇"一样灵活前进,进行检查或应急救援任务。
在主题公园或大型演唱会上,由多个空中骨骼系统组成的"飞行舞团"可以呈现出绚丽的空中表演;多个空中骨骼系统协作,可以搬运形状不规则或体积较大的物品,为物流运输带来新的可能;在低重力环境下,空中骨骼系统的优势可能会更加明显,未来说不定能在月球或火星表面看到它们的身影!
 当然,要实现这些美好的愿景,还有很长的路要走。比如,如何进一步提高系统的负载能力和续航时间,如何在复杂环境下实现更稳定的控制,以及如何保证长时间运行的可靠性等,都是未来需要解决的问题。
当然,要实现这些美好的愿景,还有很长的路要走。比如,如何进一步提高系统的负载能力和续航时间,如何在复杂环境下实现更稳定的控制,以及如何保证长时间运行的可靠性等,都是未来需要解决的问题。
不过,正如这项研究所展示的,科学家们正在一步步攻克这些难关。相信在不久的将来,我们就能看到更多令人惊叹的空中骨骼系统应用!
本文视频:
可前往公众号:机器人大讲堂,查看




