
引言
当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,湖州正着眼战略需求和前沿先机,打造仿生机器人与数控机床新兴产业链。浙大湖州研究院在机器人领域有很强的科研实力,未来,如何把握时代浪潮,助推湖州市机器人产业发展,是个值得思考的问题。为此,编写组推出若干期机器人行业观察文章,以抛砖引玉、共话发展。
▍一、农业机器人概述
农业机器人是指面向农业场景的自主作业装备,通常具备精准感知、自主决策、智能控制和自动执行的能力,其核心结构包括精准信息感知系统、决策控制系统、作业执行机构和自主移动平台,如图1所示。
农业机器人在实际应用中与人工智能、大数据、云计算、物联网相结合,已在施肥、植保、估产、巡检、采摘、运输等环节以及禽畜养殖管理中较多应用。然而,与工业机器人相比,农业机器人面临着作业环境复杂、作业对象生物特性显著、设备成本要求严格、使用维护人员技能不足等挑战,离广泛应用尚有较长的路要走。
在国际上,自上世纪80年代开始,一些发达国家就已经开始致力于农业机器人的研发工作,并相继研制出了施肥、除草、嫁接、扦插、移栽和采摘等多种农业生产机器人并逐渐商业化应用。例如,2007年出现了能够扫描果实并收集土壤、种子数据的Ag Tracker机器人;2012年诞生了能够在植物育苗室内移动盆栽树苗的机器人HV-100和能够除去生菜土地里多余种子的机器人Lettuce bot。目前,全球农业机器人高端市场由日本、美国、德国等国家占据,全球农机巨头如约翰迪尔(John Deere)、天宝导航(Trimble)、凯斯纽(CNH Global)、洋马(Yanmar)等,以及科技型初创企业如以色列FFRobotics、德国Deepfield Robotics等都投入重金开展农业机器人的研发、制造和应用,进而为这些国家智慧农业的发展带来了巨大推动。
中国农业机器人研究与开发方面起步较晚,起步于20世纪90年代中期,进入21世纪初,随着中国经济的快速腾飞,以及乡村振兴战略的持续推进,中国农业农村数字化转型的进程不断加快,农业机器人的市场需求也进一步扩大,各项政策持续发力,例如《“机器人+”应用行动实施方案》中提出研制果园除草、精准 植保、采摘收获、分选以及畜禽养殖精准饲喂与巡检的农业机器人。2022年工信部装备一司、农业农村部农机化司联合发布《农业领域机器人应用优秀场景公示名单》,期望形成一批可复制可借鉴的农业机器人成果并加强推广应用。在市场需求与国家政策的双重推动下,国内涌现了一批该领域的代表企业,例如苏州博田、广州极飞、中联农机、丰疆智能、悟牛智能、博创联动等,同时许多高校、科研院所的团队也都投入了力量进行研究。但总体来看,国内农业机器人市场还处于初期,大规模应用的场景还不多见,在国际上未形成竞争优势,未来还有很大的发展潜力。
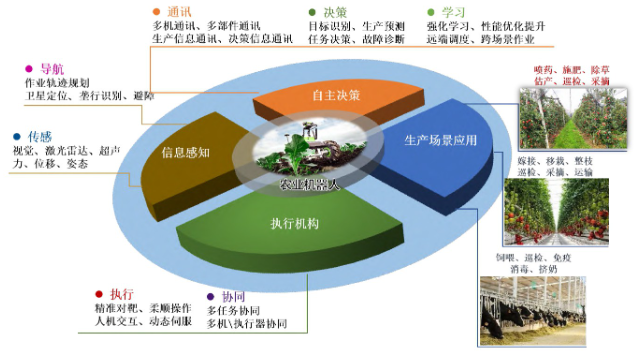
图1 农业机器人核心组成部分级应用场景
▍二、农业机器人分类
农业机器人大致分为大田生产农业机器人、设施农业机器人和农产品加工机器人,其中又包括施肥机器人、耕耘机器人、除草机器人、喷药机器人、蔬菜嫁接机器人、收割机器人、采摘机器人等细分领域。
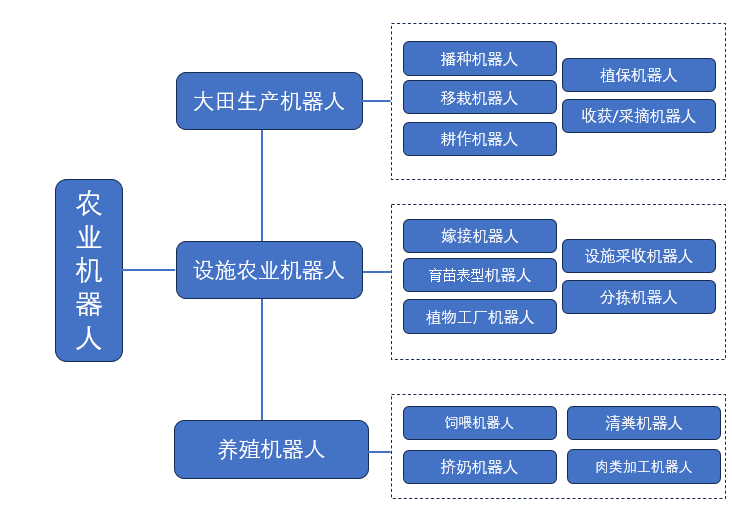
图2 农业机器人分类
2.1 大田机器人
大田农业机器人是指在大田环境下从事土地耕整、 施肥施药、精量播种、作物收获等任务的无人化、 自主化作业装备,包括播种机器人、收获/采摘机器人、植保机器人、耕作机器人以及移栽机器人等。
大田播种/耕作/移栽机器人:播种机器人是指通过自主导航、智慧决策和精准化作业等技术,实现大田生产土地耕整一致性、播种精量化、移栽智能化的机器人。它们能够精确投放种子,确保均匀种植,保障大田种床平整度,降低播种移栽成本,提高农作物产量和质量。这些机器人可以适应不同类型的农作物和土地条件,在小麦、玉米、大豆等作物的种植中发挥着重要作用。播种/耕作/移栽机器人主要技术难点在于高精度高程图实时绘制、对特殊形态种子的精量播种、漏播监测和补种、以及移栽中的高速识苗取苗剔苗补苗等。在美国、德国等发达国家,播种/耕作/移栽机器人已经得到了广泛应用。
丹麦FarmDroid 公司的播种机器人FD20,以高精度 GPS 技术为基础,由太阳能板供电,可提供 21 小时的自主运行时间,无需充电,在播种时利用 GPS 信号标记作物的位置,后续可将植株行与行之间生长至土壤中1~3 cm的杂草清除,一星期内能种植20公顷的甜菜,是全球第一个可以兼顾播种和除草的全自动太阳能机器人,目前市场价格约为75000欧元。

图3 FD20播种机器人
德国大型农机企业Fendt的Xaver田间机器人,最新版配备了20升的圆盘种子播种机,可以装载大约0.5公顷的种子,而每公顷大概需要9万粒种子,单个谷物种子由电驱动系统以厘米级的精度按距离播种。Xaver最大负载重量高达250公斤,空重只有150公斤,配置了三个大轮进行运动控制,单一后轮能够转向,可以全轮驱动,后轮除了驱动机器人外,还起到在播种时封土的作用,其对土壤压力很轻。未来Xaver田间机器人还将配备传感器以测量土壤水分、土壤温度、有机质含量和植物残留量,来确定种子的正确深度,目前市场价格未定。

图4 Xaver田间机器人
国内祝清震等研制了宽苗带冬小麦分层施肥播种联合作业机,以及基于CAN总线通信技术研制了配套使用的精量排肥/排种控制系统,可对深层肥、浅层肥和小麦种子的施播量进行精准闭环控制;联适导航公司研制的自主平地机器人根据机载高精度北斗卫星实时测量平地机具在作业轨迹点的高程信息,并绘制高程图,继而与方案图中目标高程进行对比,系统作业时通过实时计算不同定位点的高程差自主调整平地铲高度,从而精准获得平地效果。
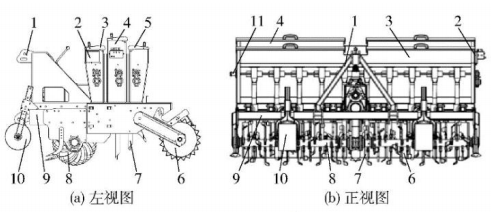
图5 宽苗带冬小麦分层施肥播种联合作业机示意图
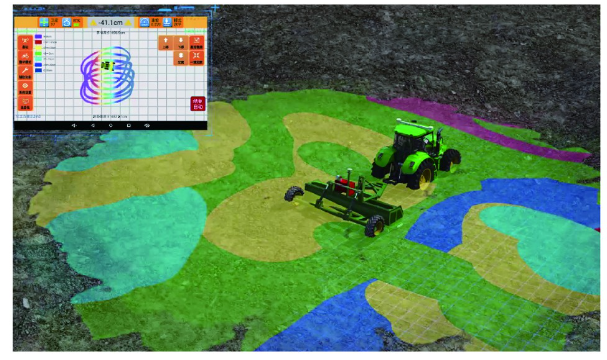
图6 自主平地机器人根据卫星图像进行平地
大田收获/采摘机器人: 大田果蔬采摘作业是农业生产链中最耗时和费力的环节之一。由于采摘作业具有季节性强、果蔬生物特性差异大、劳动强度大、费用高的特点,保证果实适时采收、降低收获作业强度及用工费用成为农业增收的重要途径。然而,由于采摘作业的复杂性,自动化程度仍然较低。目前,全球水果采摘作业主要依赖人工进行,费用占成本的30%~50%,且存在集中、劳动强度大、工时紧张等问题。大田果蔬采摘机器人在降低工人劳动强度和生产费用、提高劳动生产率和产品质量、保证果实适时采收等方面具有巨大的发展潜力。
荷兰AvL Motion公司研发的白芦笋选择性收获机器人AVL S9000,重4500公斤,具有自适应速度控制,最高速度3.6公里/小时(1米/秒)。采用光学视觉手段检测出土笋芽,设计了基于回转链循环的多末端执行器,实现了垄上多个白芦笋的入土、切割、柔性夹持和出土集箱过程,每株平均收获时间为1.3 s,最大可在一小时内收获 9,000 根芦笋。

图7 AVL S9000收获机器人
美国CROO Robotics研发了大田高垄草莓收获机器人,每台收割车配置 16 个独立工作的机器人,利用草莓与茎叶的位置差异,设计了柔性茎叶和草莓果分离末端执行器和开合式硅爪采收轮,通过旋转光学相机识别定位目标草莓,实现了快速采收、输送和集箱。
图8 大田高垄草莓收获机器人
茶叶采摘的自动化是大田农业中较难的部分,技术难点茶叶体积较小,新芽和老叶往往难以区分,且茶叶种植一般在山地较多,对于机器人的环境适合性要求高。浙江理工大学农业机器人与装备创新团队研制的采茶机器人,通过机器视觉识别茶叶的新芽和老叶,并通过机械臂进行采摘,目前该机器人还在实验室阶段,已迭代更新6次,最新版取代了原先的轨道式移动而采用履带式,能适应更多地形,准确率可达85%以上,目前已在杭州的多个茶园进行了测试。

图9 采茶机器人
翟长远等人将无人驾驶技术、机器视觉与甘蓝收获技术结合,研制了大田甘蓝自主收获机器人,通过北斗系统定位种植行后将采收臂与甘蓝对齐、机器视觉微调后完成对行采收作业,同时通过传输通道将甘蓝运至协同运输的自动行驶车辆。

图10 大田甘蓝自主收获机器人
以美国为代表的发达国家已经将研究重点转向果园采摘机器人技术研发与应用并取得较好的成果,如苹果、柑橘采摘机器人已初步实现小规模产业应用。当前果园采摘机器人可分为无人机飞行采摘、关节机械臂+负压吸附采摘、并联机械臂+负压吸附采摘以及多组机械臂+夹持旋拧采摘四种类型。代表性成果包括以色列Tevel Aerobotics公司的果园采摘飞行无人机FAR(图11A)(Barnett & Work, 2021)和澳大利亚Ripe Robotics公司的水果采摘机器人EVE(图11B)。这些成果基于机器视觉技术和自主导航规划路径技术,可在果园中自主移动、定位和检测水果成熟度,并采用集成的抓取臂结合负压吸附的方式获取成熟水果,具有较高的商业化应用能力。
中国的果园采摘机器人研制相对较晚,在国内一些高校和科研机构的努力下,取得了一些成果,涉及目标识别、末端执行器和路径规划等方面,但产业化应用推进仍较为缓慢,多数机器人及相关技术仍处于实验室研制阶段。赵春江团队研发的"采-收-运"一体式果园多臂采摘机器人Auto Picker(见图11C),采用基于多任务深度学习的立体视觉技术和启发式任务规划算法,通过四臂并行采摘执行部件,每小时收获数量超过500个,其综合性能与国外产品相媲美。杨福增团队研发的苹果双臂采摘机器人(见图11D)是一个整机采摘—转运多机器人系统,采用仿生旋转拉拽的方式,平均每秒单臂采摘速度约为7.5个果。

图11 (a) 以色列采摘无人机FAR;(b) 澳大利亚Ripe Robotics EVE机器人;(c) 果园多臂采摘机器人AutoPicker;(d) 果园双臂采摘机器人。
大田植保机器人:植保机器人是指通过自主导航、视觉识别与定位和精准作业控制技术完成除草、喷药、追肥等功能的机器人。传统的植保机械以手动和小型机动喷雾为主,但会造成操作人员中毒现象,且劳动强度较大。相比于人工,植保机器人能够持续作业,并能够精确识别农田中的作物生长状况、病虫害分布,并进行针对性的防治,大大提高了作业精度,而且还能够根据作物需求进行精准施肥和喷药,减少农药和化肥的使用,从而降低对环境的污染。植保机器人的主要技术难点在于作物杂草高精度实时识别、精准对靶作业等。
植保无人机是目前应用较为广泛的植保机器人之一,通过控制无人机飞行从而进行大规模农药的喷洒,目前已在我国多地融入到实际生产之中。2016年前后国内植保无人机快速增长,数据显示,2021年,中国植保无人机保有量增长至9.8万架, 2022年在13万架左右。国内代表企业有大疆、极飞、极目、拓攻等,其中大疆和极飞占据了绝大部分市场份额。无人机植保相比于人工效率更高,且可以节约50%的农药使用量和90%的用水量,一定程度上可以降低资源的成本。

图12 植保无人机
美国 Verdant 公司研制了SprayBox植保机器人,由 50个喷嘴和复杂的计算机系统组成,综合应用计算机视觉、机器视觉等技术,以20次/s的速度瞄准单个杂草和农作物,并以毫米的精度喷洒除草剂或肥料,每小时喷洒面积高达3.75 英亩,可识别和处理超过50万株植物,化学除草剂使用量可比传统喷洒技术节约95%左右,已经规模化应用于胡萝卜种植。

图13 SprayBox植保机器人
西班牙公司AGRobot研制的Bug Vacuum全自动吸虫机器人,具有双风扇真空系统,通过精确的风扇高度控制最大限度吸引虫子,主要用于防治盲蝽害虫。该机器人通过激光雷达实现自主导航和智能避障,相比于农药喷洒式对于环境的危害要小得多。
图14 Bug Vacuum全自动吸虫机器人
瑞士EcoRobotix公司研发的除草机器人由太阳能提供动力,通过 GPS RTK、相机和传感器实现精准定位,并在智能图像识别后使用两个关节臂喷洒微剂量的除草剂,然后通过并联机械臂以高响应速度将小剂量的除草剂直接喷到杂草上,可减少农药用量20倍。

图15 EcoRobotix除草机器人
Jiang 等设计了面向复杂农田环境的损伤施药除草机器人,如图16,所使用的化学药剂仅为推荐计量的15%,在对抗性杂草的防除效果尤佳;李南等人设计了电驱动田间锄草机器人,以中小功率拖拉机为配套动力,机器视觉系统实时对作物和杂草进行识别与定位,伺服电动机驱动月牙形锄草刀对行护苗锄草,伤苗率小于10%,杂草锄净率约为90%。

图16 面向复杂农田环境的损伤施药除草机器人
2.2 设施农业用机器人
设施农业机器人指的是在塑料大棚、玻璃温室等设施生产环境下,应用于育苗、生产管理、采摘等复杂场景的智能化、自主化作业设备。包括嫁接机器人、育苗表型机器人、设施采收机器人、植物工厂机器人和分拣机器人等。
嫁接机器人:嫁接机器人是指利用传感器和计算机图像处理技术,实现嫁接苗子叶方向的自动识别、判断的机器人。嫁接机器人能完成砧木、穗木的取苗、切苗、接合、固定、排苗等嫁接过程,包括蔬菜嫁接机器人和油茶嫁接机器人等。嫁接机器人能够有效提高作业效率和嫁接苗成活率,被公认为是能够最先投入实际生产应用的设施园艺机器人。
荷兰设施园艺自动化生产装备技术世界领先。荷兰 ISO Group 公司面向茄果类种苗研制的蔬菜嫁接机器人Graft 1200, 配备有秧苗机器视觉识别系统和秧苗输送系统,精准获取秧苗子叶和茎部参数,采用图像处理器分析夹持爪上的激光投影位置来确定上苗高度,每小时可处理1050一株移植物,成功率为99%,售价约150万元人民币。
图17 Graft 1200
日本是嫁接机器人技术研究的起源地,其设施园艺机器人技术处于国际领先水平,显著特点在于科研单位与农机企业的密切合作。日本洋马公司与生研机构联合推出的AG1000型嫁接机是茄类全自动嫁接的代表机型,能够实现多株同步嫁接,砧木和接穗均采用穴盘方式上苗作业,需一人上机供给穴盘,生产效率可达1000株/h,嫁接成功率为97%;日本三菱公司为日本农业协同组织联合会(JA)定制开发出型号为 MGM600 的半自动嫁接机,适用于茄类作物,生产效率可达600株/h,嫁接成功率为95%,由于营养钵苗比穴盘苗的单株重量大,人工上苗劳动强度大且不方便,因此,开发了砧木和接穗的带式单列钵苗输送上苗装置,可将钵苗精准输送至上苗工位。上述产品售价基本都要达到100万元人民币以上。

图18 AG1000型嫁接机 图19 MGM600 半自动嫁接机
合肥佳富特机器人公司自主研制的JFT-B1200T是国内首台茄果类全自动嫁接机器人,具有自动上苗、自动切割、贴接、包扎以及成品苗的自动码盘等功能,嫁接成功率超过98%,嫁接速度为1200株/小时,相比人工可缩减70%-80%的成本。

图20 JFT-B1200T
设施育苗表型机器人:设施育苗机器人是在可控环境条件下进行作物形状、结构、大小、颜色等可观测性状进行高通量信息获取的机器人,它为优良品种选育提供表型组学信息。其难点技术在于多源时空高光谱信息融合识别、复杂生长环境下生物性状特征去噪辨识等。
荷兰Phenospex公司的PlantEye F600全自动表型机器人,将3D 视觉与多光谱成像相结合,单次扫描分析 5-100 株植物,每次扫描可获得20 多个植物参数,包括最大植株高度、平均株高、冠层透光深度、叶面积、凸包面积、平均色相、平均亮度等,并在扫描后生成植物的3D模型与光谱模型。
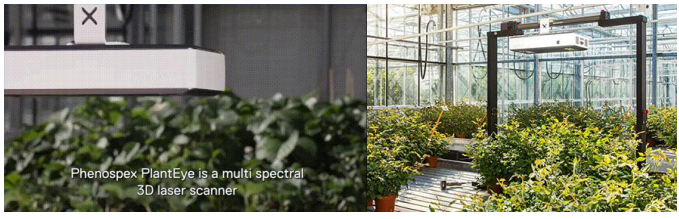
图21 PlantEye F600全自动表型机器人
北京魔山科技的田间高通量植物表型机器人,以轮式机器人Autolabor PM1为本体,装载激光雷达、超声波、视觉传感器等多种传感器,基于多传感器信息融合的环境感知技术,实现了机器人在农业环境下的高稳定性运动与数据采集处理,并具备自动巡检、定点采集、自动避障、自动返航等功能。

图22 魔山科技田间高通量植物表型机器人
打叶整枝类机器人:打叶整枝类机器人指的是通过对蔓、茎、果、叶、绳感知与理解,基于果蔬专家经验知识、农机农艺融合完成打叶、整枝的机器人。其难点技术包括高效末端执行器设计及专家决策方法、目标枝叶定位机器视觉算法、避障运动规划控制方法等。
荷兰公司Priva的番茄切叶机器人Kompano,配备了5千瓦时的电池,重量接近425公斤,可全天候对番茄植株进行摘叶操作。在智慧算法和已获专利的末端执行器支持下,这款机器人每周作业面积达1公顷,准确率超过85%。该机器人已在荷兰的多个温室进行试验,首批生产50台,第一批机器人已经交付种植者使用。

图23 番茄切叶机器人 Kompano
荷兰工业企业VDL集团联手荷兰园艺企业Bosman Van Zaal研制的CropTeq摘叶机器人,专注于解决高空吊蔓栽培黄瓜植株的自动化摘叶工作。这款机器人由一台机械臂和移动式平台组成,单臂每小时摘叶1000片以上,通过沿茎进行直线切割,并在切割后进行消毒,能最大限度地减少损伤。

图24 CropTeq摘叶机器人
设施采收机器人:设施果实采收类机器人是指依据着色、尺寸等指标自动识别作业对象、自动规划路径并进行选择 地收获的机器人,是设施生产无人化作业的关键装备。其主要技术挑战在于任务路径自主规划、受遮挡目标重建、灵巧低损末端执行器设计等。
日本农业科技公司Inaho研制的番茄采摘机器人,能够通过AI算法根据果实颜色和大小识别成熟度并完成番茄的全自动采摘,一次充电可使用12小时,目前该机器人仍在不断更新迭代,最新版本的机器人通过“集群”采收,一小时可收获12公斤的番茄。目前该机器人已在荷兰的两家温室进行了测试,并证实可将人力劳动减少16%。

图25 Inaho番茄采摘机器人
西班牙 AGRobot公司开发的针对高垄栽培和架式栽培草莓采收机器人,通过24个独立机械臂以无线通信方式协同工作,每个机械臂带有一个短视距集成彩色和红外深度传感器和图像处理单元确定待收获草莓的成熟度,其末端执行器采用断茎夹持方式收获草莓,不直接接触果实,避免损伤。目前该机器 人已经在美国加州的农场投入使用。

图26 AGRobot草莓采收机器人
荷兰、比利时、瑞典和以色列四个国家科研人员组成的研究团队所研制的Sweeper甜椒采收机器人,由一个六自由度机械臂、末端执行器、RGB-D 相机、带图形处理单元的计算机、可编程逻辑控制器和储存装置构成。通过激光雷达确定自己巡视的路径,借助计算机视觉技术从远距离和近距离判断甜椒的位置和成熟度,利用震动刀切割果梗实现采摘作业,在商业温室试验状态下,收获一枚甜椒平均仅需 24 s,准确率超过 60%,是全球第一台具有商业化应用性能的甜椒采摘机器人。

图27 Sweeper甜椒采收机器人
2.3 养殖机器人
养殖机器人指的是在畜禽、水产等规模养殖环境下完成饲喂、环境消杀、挤奶、捕捞、健康巡检等任务的机器人,包括饲喂机器人、农产品加工机器人、养殖消杀机器人等。
饲喂机器人:饲喂机器人可以对饲料进行精准配比和投送,减少人工成本和工作量,提高饲喂效率,主要有悬挂式、固定式、导轨式、车辆式等。美国等国家对母猪和奶牛精准饲喂系统都有研究和实地应用考察,对生产率的提升有明显的效果,我国也有相关研究和应用。
荷兰Lely公司研制的Lely Juno推料机器人,可以通过蓝牙连接手机进行远程操控,使用了超声波测距,使得机器人可以自主地将饲料推送到牛可以触及的地方,且携带减振保护装置,可以进行高效饲喂和推料。

图28 Lely Juno推料机器人
浙江大学湖州研究院科研团队研制了畜舍自动投料车,该投料车可以代替人工在羊舍内自主驾驶并投料,目前已经在规模化羊舍中开展应用测试。投料车可根据不同羊舍的饲养需求提供定制化的投喂,如针对大羊、小羊、孕羊等不同羊群的需求自适应调整投喂量,既可节省人工,还可减少饲料浪费,提高畜舍养殖效率与科学性。

图29 畜舍自动投料车
此外,浙大湖州研究院科研团队研制的智能无人虾蟹养殖船也投入应用,相比传统人工投放饵料的方式,无人船投饵能够更加均匀,塘口播撒面积更加宽广,有效的减少了大小虾、大小蟹的情况出现,并为养殖户节省了大量精力和时间,提高了水产行业的养殖效率,同时配备数据监控分析,使养殖简单化、精细化、高效化。

图30 智能无人虾蟹养殖船
农产品加工机器人:荷兰Lely 公司在1992年研制了第一台挤奶机器人Astronaut,目前已更新到第五代,Astronaut A5安装在牛舍旁边,当奶牛需要挤奶时,可随时前往挤奶区进行挤奶。挤奶前,机器人会对牛乳头进行刷洗和消毒,通过自动感应系统完成套杯、挤奶工作。除此之外,挤奶机器人可检测牛只健康状况与牛奶中细菌、体细胞数含量,若发现牛只存在患有乳房炎风险时,挤奶机将做出相应警示,及时引导牧场管理者进行判断并做好预防、治疗工作,根据牛奶品质判断将其汇入大奶罐或排入废奶池。

图31 挤奶机器人
德国工业机器人巨头库卡研制的食品加工机器人系列覆盖肉类农产品加工的分解、剔骨、包装、码垛等过程,机器人所有轴上均采用无害 H1 润滑剂,符合食品工业的严格要求。

图30 库卡肉类加工机器人系列
▍三、结语
农业机器人的发展面临使用环境复杂多样、用户投入产出比较低、使用维护人员能力不足等方面的挑战,这在很长时间内影响了该行业企业的研发投入,很多新型农业机器人的研发以高校和科研院所为主。但考虑到智慧农业发展、农业劳动力短缺、劳动力成本提高等因素,该行业发展前景明朗而广阔,且随着国家相关政策的支持,市场对农业机器人接受度越来越高,特别在无人机打药、果园喷施等特定场景方面更是获得了普遍认可。相信随着机器人技术的不断进步、硬件成本的不断降低、典型应用场景的不断扩展,将有越来越多的企业投入到农业机器人研发中,进而促进供需的良性互动,推动农业机器人行业又好又快地发展。
来源:浙大湖州研究院



