
蛇形机器人在狭窄空间和复杂环境中展现出了独特的优势,但其物体操控能力一直是制约其广泛应用的瓶颈。东北大学硅突触实验室的研究团队,在Alireza Ramezani教授的指导下,蛇形机器人难以操控物体的难题,成功开发出一种让蛇形机器人同时移动和操控物体的新方法。
传统的轮式或腿式机器人在进入狭窄空间或与复杂环境互动时,往往显得力不从心。而蛇形机器人凭借其灵活多变的身体形态,能够轻松适应各种复杂地形,并在狭小空间内自由穿梭。但是大多数蛇形机器人在物体操控方面的捉襟见肘大大限制了其在实际应用中的价值。
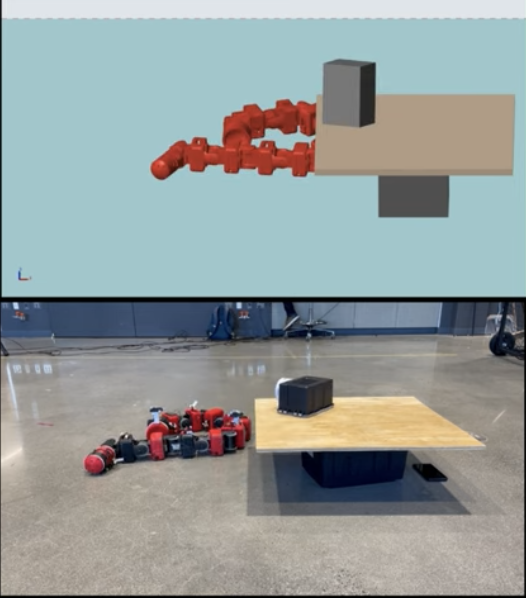
为了解决这一难题,研究团队在已有的蛇形机器人平台COBRA上进行了创新。他们通过重新设计机器人的夹爪,使其能够抓取并移动物体,同时结合机器人变形的能力,实现了五种不同的运动方式。这些改进使得COBRA机器人不仅能够在狭窄空间中灵活移动,还能在操作过程中展现出高度的灵活性和精确性。
为了验证这一新方法的可行性,研究团队开发了一种基于优化的规划器。该规划器充分考虑了地面反作用力等因素,能够精确规划机器人的运动和物体操控策略。通过一系列实验测试,研究人员证明了该方法的有效性,并展示了COBRA机器人在各种场景下的出色表现。

未来,研究团队计划进一步拓展COBRA机器人的应用场景。他们将在机器人上添加更多的传感器套件,如摄像头和IMU等,以提高机器人的自主运动能力。同时,他们还将探索利用COBRA机器人的变形能力来解决更多复杂的自主运动任务,如翻滚和侧向移动等。此外,研究团队还将利用摄像头等传感器来解决闭环物体操作问题,让机器人能够更加智能地识别、抓取和移动物体。
这一研究成果不仅为蛇形机器人的发展开辟了新的道路,也为未来机器人在复杂环境中的应用提供了更多可能性。



