
在KTH(瑞典皇家理工学院)新设立的前沿实验室中,一群太空机器人正在接受严格的失重环境导航训练。这座实验室是由WASP NEST项目的DISCOWER分支精心打造,是同类实验室中的佼佼者。
DISCOWER设立该实验室的目的十分明确:开发能够在太空及水下等失重条件下独立导航的自主机器人的软硬件系统,突破非常规重力条件下的机器人技术瓶颈。
KTH自动控制领域的权威教授Dimos Dimarogonas指出:“我一直坚信,无论是水下还是太空,机器人都面临着类似的挑战——那就是非常规的重力条件。水中的浮力和太空的失重都为机器人的自主导航带来了巨大挑战。在这些极端环境中测试自主系统,机器人不依赖人类直接控制独立移动是极其困难甚至是无法实现的。”
博士生Pedro Roque进一步解释:“由于测试条件的限制,之前对于失重环境下多机器人系统的自主运行研究非常有限。幸运的是,通过DISCOWER实验室,我们有机会填补这一研究空白。我们搭建了一个二维空间模拟系统,用以研究多机器人系统,在这种环境中,我们可以对自主多机器人系统的软硬件进行训练,并计划未来将其与即将建成的水下设施相结合。”
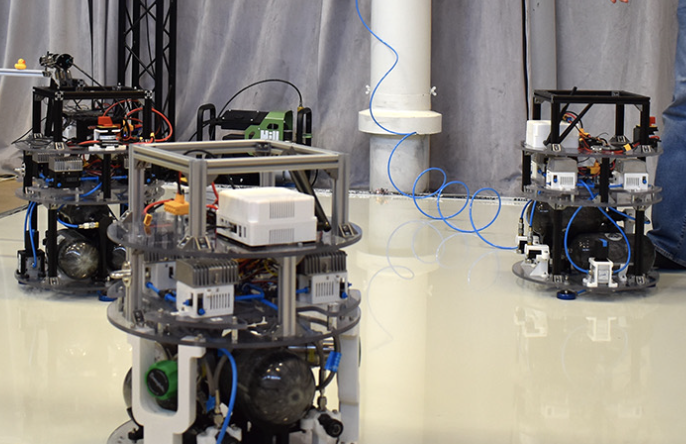
被称为自由飞行器的太空机器人由项目团队与硕士生们共同打造。为了模拟失重环境,实验室配备了三个核心组件:首先是环氧地板,其光滑平整的表面使得太空机器人能够几乎无摩擦地移动;其次是Qualisys制造的运动捕捉系统,通过六台摄像机实时追踪机器人和压缩机的位置与状态;最后是压缩空气推进器,它们模仿航天器上的推进器,通过释放气流使太空机器人产生移动。
“目前,这些太空机器人仍由研究团队远程控制,但我们的长远目标是实现三台机器人的自主协同运动。”博士生Elias Krantz表示。
Dimos Dimarogonas教授强调:“我们的研究重点在于找到适用于太空和水下两种环境的通用解决方案。同时,我们也在不断加强硬件和设施,以测试并优化相关算法。这就是我们目前的进展。”
当被问及未来机器人行动的水下环境是否仅限于地球时,Pedro Roque回答说:“目前确实是在地球上。但地球并不是我们唯一的目标。作为研究人员,我们将探索更广阔的应用场景。”



