
NVIDIA公司在上周于日本横滨举行的IEEE国际机器人与自动化会议(ICRA)上大放异彩,其研究团队不仅展示了多项创新成果,还针对几何织物的研究进行了深入探讨,成为会议的一大亮点。
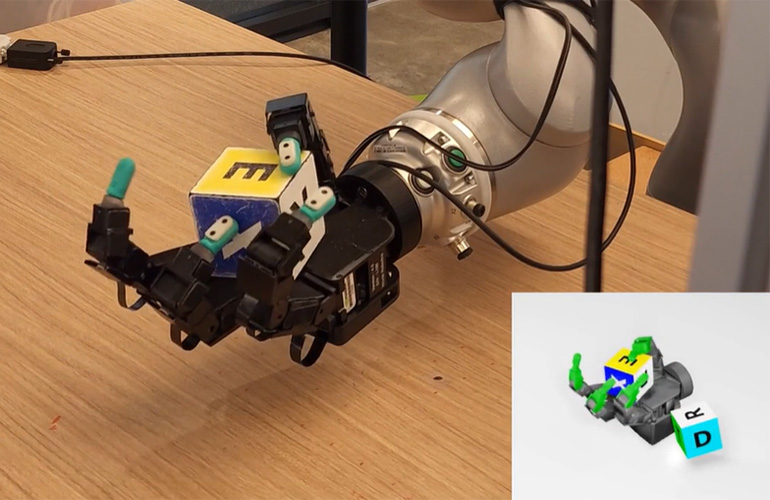
在机器人技术领域,训练策略(如几何结构)虽然大致指导机器人行动,但有时会导致机器人出现过快移动、碰撞物体或剧烈晃动的情况。为了解决这个难题,NVIDIA研究团队采用了一种独特的方法:在训练策略之上部署一层低级控制器,用以拦截和调整来自策略的指令,从而适应硬件限制。
这些控制器在训练过程中,因为有NVIDIA GPU加速的强化学习(RL)训练工具加持,可以进行高效地矢量化处理。这一进步不仅使控制器在训练和部署时更为灵活高效,还为现实世界的机器人应用提供了更安全的保障。
NVIDIA团队还从过去的两个成功项目中汲取经验,将“几何织物”项目的控制器与DeXtreme策略相结合,使机器人能够在模拟到现实(sim2real)的训练和部署中更为稳健。这个创新让机器人能够更安全地学习,并通过标称结构行为来指导策略学习,极大地提高了训练效率。
此外,NVIDIA还在ICRA上展示了其他四项重要研究:SynH2R框架用于生成逼真的人类抓取动作;测试机械臂对遮挡物体的反应;构建点云世界模型和基于点云的控制策略;以及研究机器人如何将物体悬挂在不同支撑结构上。
值得一提的是,NVIDIA还推出了ORBIT-Surgical手术机器人模拟框架,该框架基于NVIDIA Omniverse平台,利用GPU并行化技术促进机器人学习研究,以提升人类的手术技能。同时,该框架还能为主动感知任务生成真实的合成数据,并通过sim2real方法将学习到的策略转移到物理dVRK机器人上。
NVIDIA的合作伙伴也在ICRA上展示了各自的研究成果,共同推动了机器人技术领域的进步。



