
机器人操作领域中,在手部操作、可变形物体操纵和人机协同操作上,机器人与人类水平存在较大差距。[1] 如何缩短这种差距?清华大学自动化系李翔副教授 和 香港理工大学机械工程学系David Navarro-Alarcon副教授近期科研成果或许能告诉你答案。
▍使用混合 AR 触觉界面的人机协作互补框架
近日,清华大学自动化系李翔副教授团队在IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY期刊发表了一篇题为“A Complementary Framework for Human-Robot Collaboration with a Mixed AR-Haptic Interface”的论文。文章提出了一种新的人机协作互补框架,以实现协作机器人安全性和高效性的平衡。
协作机器人(cobots) 常常与人类共享工作空间。为了保证人类的安全,机器人通常必须暂停正在进行的末端执行器任务,直到人类停止干预。这种操作让机器人在不同的工作模式之间转换,可能会影响任务效率。
为同时保证协作机器人的安全性和高效性,研究团队提出了一种新的人机协作互补框架——协作机器人和人类分别作为任务空间(Task Space)和零空间(Null Space)的主要工作者,在人类指定的交互环境(interactive environment)中进行交互。这种解耦可以确保当人类参与到机器人任务中时,机器人的主要任务和末端执行器不会受到影响。
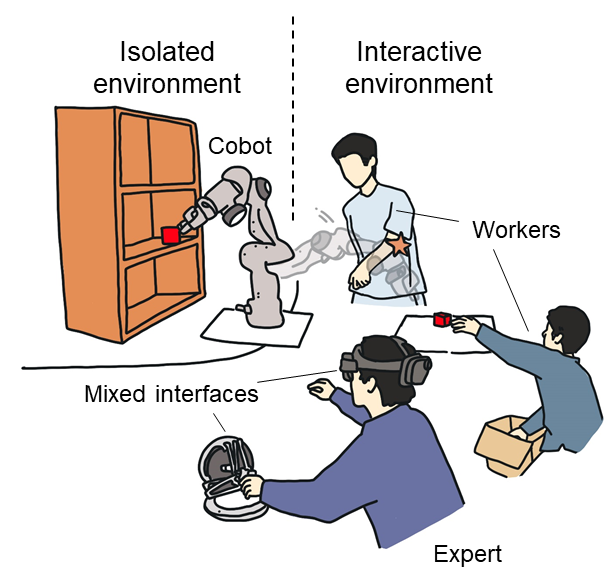
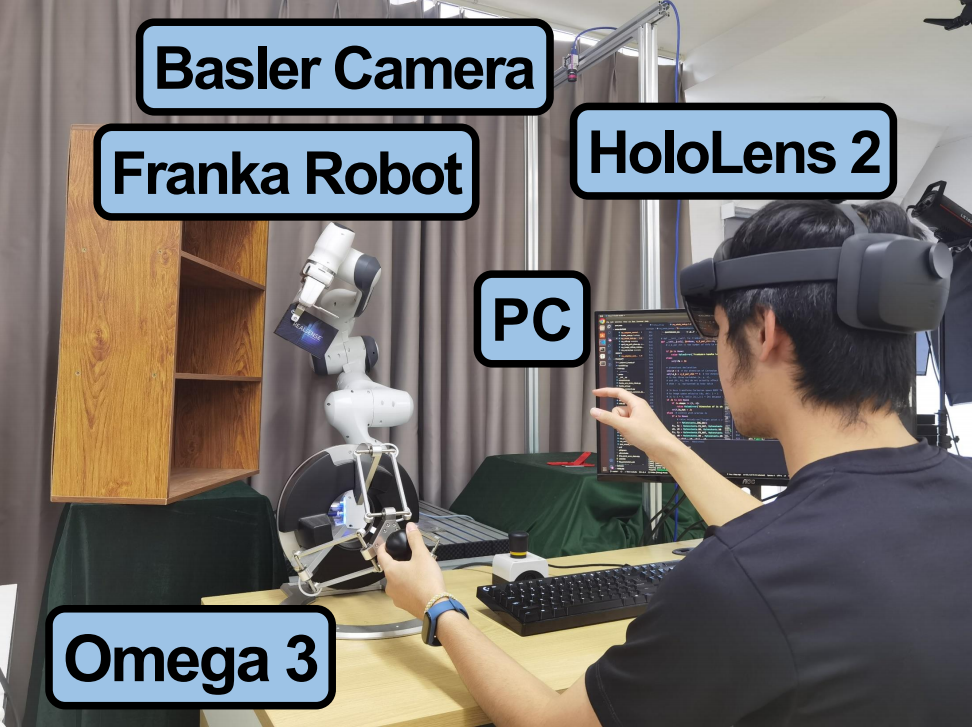
通过动态运动基元(DMP)实现的人机交互界面(增强现实(AR)和触觉设备),能够让人类专家更直观地进行示教和协作。
人类在未知复杂环境中具有较强的适应、决策、应对能力,而机器人善于处理高速、高精度和高重复度的工作,该框架能更好地发挥人类和机器人的优势并进行结合,形成优势互补。
该技术已成功部署于超声扫描机器人,允许医生随时安全介入,快速、有效地解决突发事件,保证自主扫描的安全与质量,增进患者对于机器人的信赖程度;所开发机器人的安全性与有效性已在多位受试者的颈动脉扫描诊断中得到了验证。不仅如此,该技术还能应用于外骨骼机器人,以提高穿戴的舒适性和安全性。[2][3]
参考资料:
[1] Aude Billard, Danica Kragic, Trends and challenges in robot manipulation. Science364, eaat8414(2019). DOI:10.1126/science.aat8414
[2] X. Yan et al., "A Complementary Framework for Human–Robot Collaboration With a Mixed AR–Haptic Interface," in IEEE Transactions on Control Systems Technology, vol. 32, no. 1, pp. 112-127, Jan. 2024, doi: 10.1109/TCST.2023.3301675.
[3] https://www.youtube.com/watch?v=_mbtEf5tktY&t=462s
李翔简介
Speaker Profile
他是谁?
· 清华大学自动化系副教授、博士生导师
· 入选2019年国家海外高层次人才计划青年项目
研究方向
多智能体、机器人智能操作、人机交互
主要成就
· 主持香港创新科技署项目、香港研究资助局项目、深圳科创委基础研究重点项目、国家自然科学基金项目(青年、面上、联合重点)、科技创新2030 -“脑科学与类脑研究”重大项目课题
· 出版专著一部,由Springer发行
· IJRR,TRO,Automatica,TAC,ICRA,IROS等机器人领域高水平期刊与会议发表论文100余篇
· 获得机器人旗舰会议IROS 2017 “最佳应用论文入围奖”,排名第一
· 带领团队获得了机器人旗舰会议ICRA 2022和ICRA 2023的机器人操作挑战赛奖励
· 担任了IEEE Robotics and Automation Letters、IEEE Robotics & Automation Magazine、IEEE Transactions on Automation Science and Engineering、ICRA的编委
· 担任了机器人高水平国际会议2023 IEEE International Conference on Real-time Computing and Robotics的程序主席
香港理工大学机械工程学系David Navarro-Alarcon副教授团队近期发表了一系列基于传感器的机器人系统运动控制的成果。这其中包括机器人操纵领域的热点“可变形物体的视觉形状伺服”,以及利用可变形态方向的研究成果,开发的具有主动改变形态能力的新型软体-刚体移动智能体,以及基于形态的控制方法的其他应用。
▍人机协作操纵可变形线性物体
对可变形线性物体进行实时反应操纵是一项具有挑战性的任务,它要求机器人对外力导致的物体形状变化做出快速、自适应的反应。本文提出了一种新方法,用于在人机协作的背景下对可变形线性物体进行实时反应操纵。该方法结合了拓扑潜在表示法和固定时间滑动模式控制器,实现了人与机器人之间的无缝交互。[4]

▍IEEE RAL: Self-Reconfigurable Soft-Rigid Mobile Agent With Variable Stiffness and Adaptive Morphology
研究人员提出了一种具有可控刚度和可变形新型混合移动机器人设计方案。与传统的智能体相比,该系统可以通过固化或熔化其结构中的菲尔德金属,在刚性和柔性阶段之间切换,从而通过其活动组件的运动来改变形状。在柔软状态下,机器人的主体可以弯曲成圆弧形,从而能够适应周围的曲面物体。[5]
▍光子嫩肤机器人
David团队于22年在工程技术一区期刊 IEEE-ASME TRANSACTIONS ON MECHATRONICS 上发表题为“Robotics Meets Cosmetic Dermatology: Development of a Novel Vision-Guided System for Skin Photo-Rejuvenation”的论文。论文首次提出使用机器人机械手自动进行人脸光子嫩肤。

人类操作手 vs 机器人操作手
本文提出了一种用于光子嫩肤的新型机器人系统,它能对受试者的面部皮肤组织进行均匀的激光热刺激。机器人治疗由一个定制的机械手执行,机械手配备了美容激光发生器、深度传感器和热像仪。为了规划机械手的最佳轨迹,系统会计算面部的表面模型,并将其划分为七个区域,然后自动对这些区域进行均匀的激光照射。最后,通过多位受试者实验验证了系统性能。[6]
参考资料:
[4] Peng Zhou et al.,"Reactive human–robot collaborative manipulation of deformable linear objects using a new topological latent control mode," in Robotics and Computer-Integrated Manufacturing,Vol. 88,2024,102727,ISSN 0736-5845, https://doi.org/10.1016/j.rcim.2024.102727.
[5] L. Labazanova et al.,"Self-Reconfigurable Soft-Rigid Mobile Agent With Variable Stiffness and Adaptive Morphology," in IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1643-1650, March 2023, doi: 10.1109/LRA.2023.3241749.
[6] M. Muddassir et al., "Robotics Meets Cosmetic Dermatology: Development of a Novel Vision-Guided System for Skin Photo-Rejuvenation," in IEEE/ASME Transactions on Mechatronics, vol. 27, no. 2, pp. 666-677, April 2022, doi: 10.1109/TMECH.2021.3075207.
David Navarro-Alarcon 简介
Speaker Profile
他是谁?
· 香港理工大学机械工程学系副教授
· 机器人与机器智能实验室(ROMI-Lab)项目负责人 (PI)
研究方向
Modelling and control of motion tasks in robots (机器人运动任务的建模和控制)
个人履历
· 2014年在香港中文大学(CUHK)获得机械与自动化工程学博士学位,师从刘云辉教授
· IEEE高级会员, IEEE Transactions on Robotics (T-RO) 期刊副主编
4月23日(周二)19:00,《方斌对话》系列直播03期邀请清华大学自动化系李翔副教授、香港理工大学机械工程学系David Navarro-Alarcon副教授分别以“面向人机共融的智能互补协同操作”和“On Shapes, Robots, and Sensor-Based Controls”主题分享报告。方斌教授还将以独特视角开启三人精彩对话,带领观众直击港深前沿机器人研究,探寻科研合作机会。期待本期《方斌对话》带给您不一样的启发!欢迎扫码报名观看!

扫码报名观看直播
关于《方斌对话 | 人机协同操作》
《方斌对话 | 人机协同操作》系列直播由中国人工智能学会、中国自动化学会主办,中国人工智能学会认知系统与信息处理专业委员会和NOKOV度量动作捕捉承办,机器人大讲堂媒体支持。该活动由CAAI认知系统与信息处理专委会秘书长方斌教授发起,邀请相关领域学者共同探讨人机协同操作的前沿研究和技术发展,并通过直播对话的形式进行思维碰撞,为观众带来全新视角和启发。
此外,由约克大学朱吉鸿助理教授、清华大学李翔副教授、北京邮电大学方斌教授、卡耐基梅隆大学Zackory Erickson助理教授、土伦大学Claire Dune副教授和香港理工大学David Navarro-Alarcon副教授组织的ICRA 2024 Human-Robot Co-Manipulation Workshop 即将在 ICRA 2024 Yokohama, Japan 拉开帷幕。欢迎报名参加!Workshop更多信息请访问:
https://sites.google.com/york.ac.uk/icra24-co-manipulation



