
软体机器人技术在工业抓取、医疗器械和可穿戴设备等领域展现了巨大应用潜力,因其固有的柔性和设计灵活度,软体机器人可以达到甚至超越自然生物的的灵活性和多功能性,但由于软性材料具有无限自由度和非线性行为,实现软体作动器的可控变形仍然面临挑战,为了解决这个问题,目前主要采用引入几何或材料各向异性的方法。
该论文提出了一种基于网格增强的气动软体机器人设计方案,通过外侧网格图案的几何设计,对软体作动器的弯曲、伸长和扭转变形进行可编程控制,同时建立了基于几何正交各向异性和材料非线性的大变形解析模型进行设计。相关成果以“Modeling and Design of Lattice-Reinforced Pneumatic Soft Robots”为题发表于IEEE Transactions on Robotics (T-RO)期刊。

▍网格设计
该论文设计了具有伸长、弯曲和扭转功能的软体作动器,由硅胶弹性内胆和外侧软胶网格构成,对内胆施加气压后,作动器会根据网格的几何设计产生不同的变形。扭转作动器的网格由一组倾角为α的斜杆和一组圆环纵横交错而成,斜杆用于引导扭转运动,圆环则用于限制径向膨胀,在气压的作用下,软体作动器会产生扭转与轴向伸长的耦合行为。伸长作动器外侧网格由马蹄形微单元和圆环组合而成,由于马蹄形微单元在受到轴向拉力时会发生局部弯曲引起的拉伸变形,这类网格具有大拉伸性。当伸长作动器两侧使用不同的网格宽度时,网格较细的一侧伸长量大,较粗的一侧伸长量小,这种差异伸长率可以引导作动器向网格较粗的一侧弯曲。
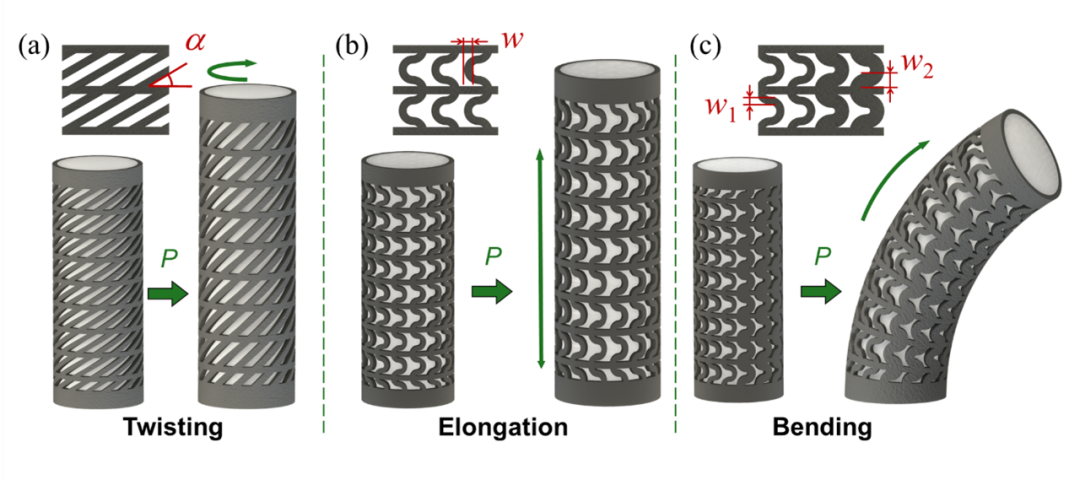 图1 扭转、伸长和弯曲网格增强软体作动器结构设计
图1 扭转、伸长和弯曲网格增强软体作动器结构设计
▍理论模型
为了精确控制软体作动器的变形,建立了弯曲、伸长和扭转变形的理论模型。
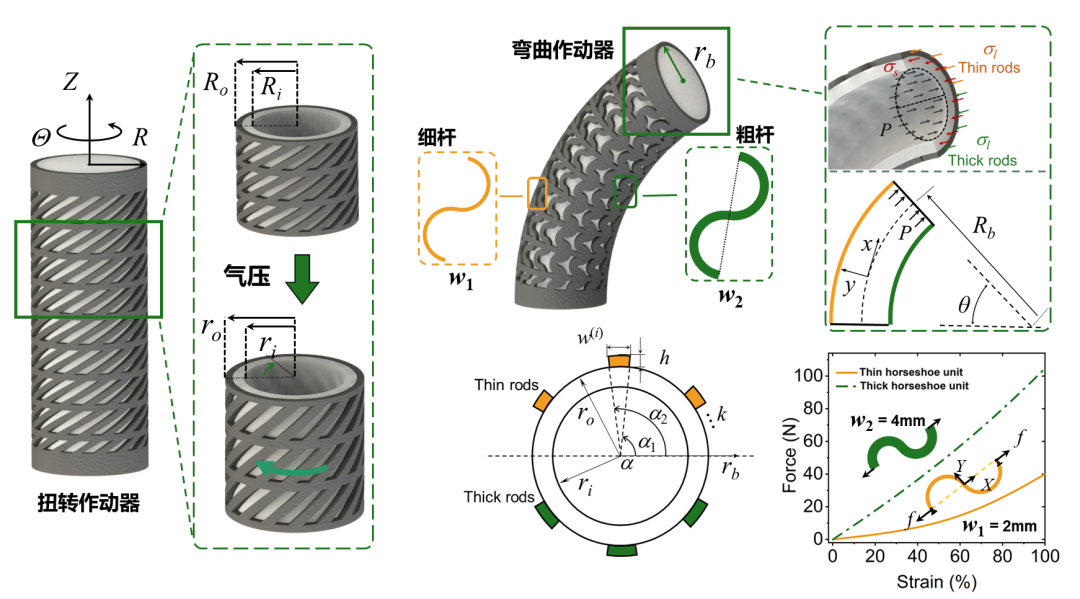
图2 理论模型示意图
首先建立了基于几何正交各向异性和材料非线性的扭转作动器理论模型,同时考虑了内胆变形的各向同性能量、网格整体变形的正交各向异性能量以及局部变形的弯曲能量。依据网格的方向性排布,构造了基于正交各向异性的能量密度方程;针对网格局部变形,加入了局部弯曲的弹性能。根据扭转作动器形变前后的坐标关系映射,得到了应变的形变梯度矩阵,进一步推导出柯西应力。通过求解拉格朗日平衡方程和宏观力与力矩平衡方程,可获得扭转作动器的形变。
其次建立了伸长和弯曲软体作动器的理论模型。当两侧马蹄形微结构宽度一致时,作动器表现为轴向伸长,当两侧不同宽度不一样时,作动器发生弯曲变形。基于梁单元的力和力矩平衡,建立了马蹄形网格超材料的非线性应力应变特性;通过求解端面的力与力矩平衡方程,可计算出伸长和弯曲软体作动器的形变参数。
▍实验验证和动态性能测试
为验证大变形理论模型的准确性,搭建了实验平台,提取了不同设计参数软体作动器的形变参数,与理论模型计算结果对比。如图3所示,在斜杆排布角度α为30°,45°和60°时,模型可以准确预测扭转作动器的扭转量和轴向伸长量。利用理论模型进行设计,当排布角度为36°时,作动器扭转量达到峰值。
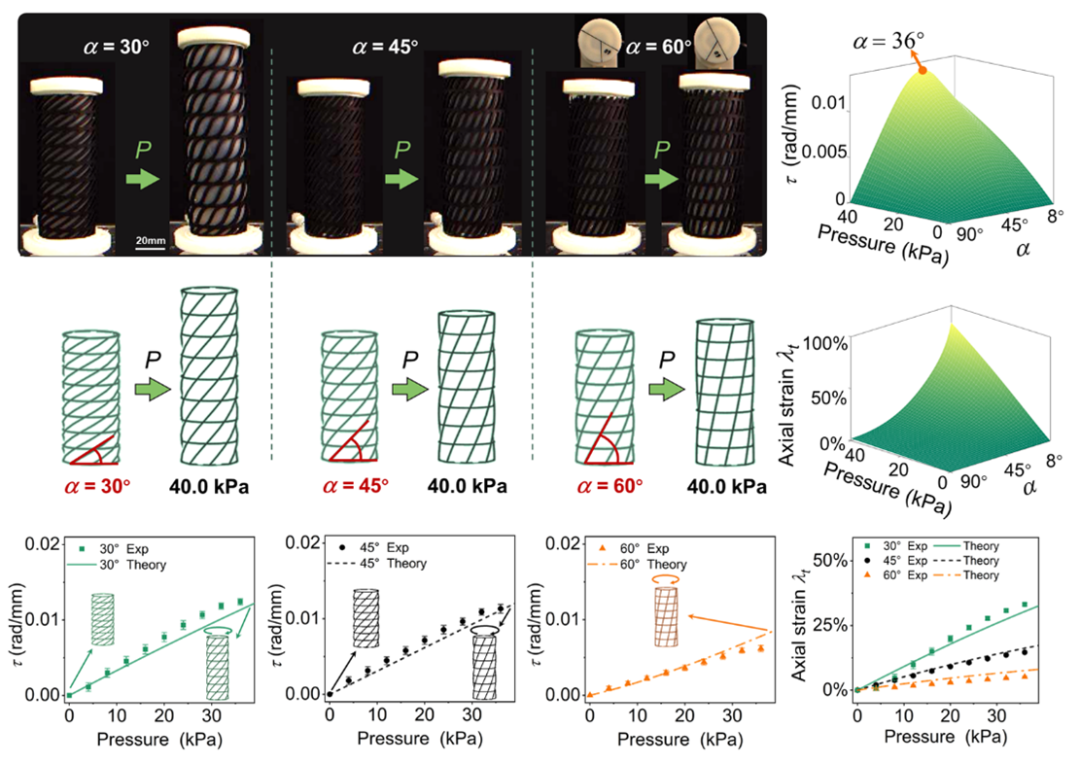 图3 扭转作动器理论与实验结果对比
图3 扭转作动器理论与实验结果对比
弯曲和伸长作动器的对比结果如图4所示,当宽度比从2:2变为2:3.5时,实验结果和理论预测结果吻合较好,弯曲作动器的弯曲变形随宽度比增加而增大,同时随输入气压非线性增长。
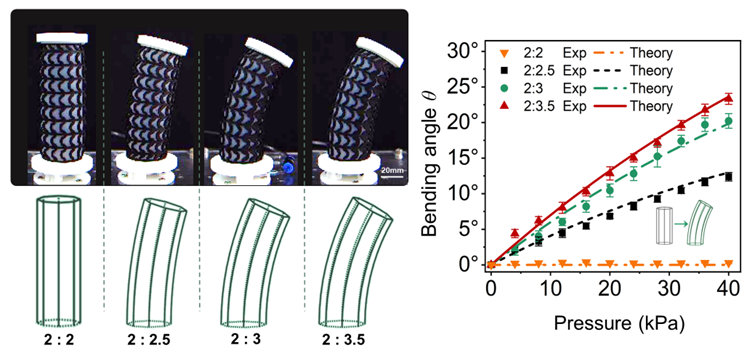 图4 弯曲和伸长作动器理论与实验结果对比
图4 弯曲和伸长作动器理论与实验结果对比
验证后的模型可进一步用于研究几何、材料和载荷对软体作动器行为的影响。在原有扭转设计基础上,加入另一组倾斜角度为β的斜杆。模型预测显示,在保持一组斜杆角度α不变时,作动器的扭转和伸长效果会随着β产生显著变化。为验证其准确性,选取了不同角度配比进行实验验证,结果表明模型预测结果准确。
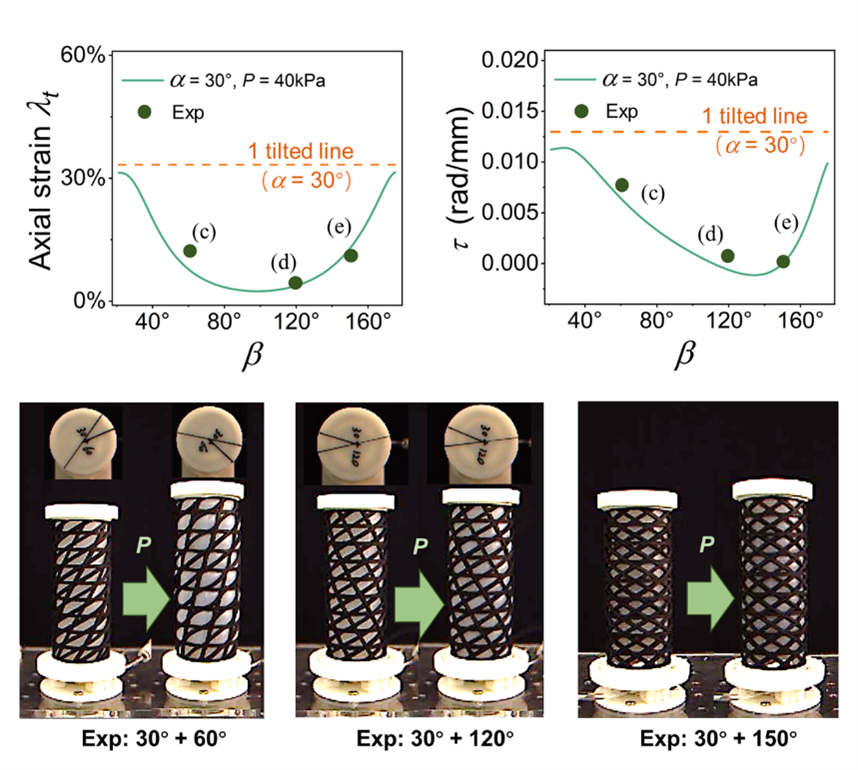 图5 两组斜杆扭转作动器变形的理论预测和实验验证
图5 两组斜杆扭转作动器变形的理论预测和实验验证
在完成了模型建立和软体作动器静态性能研究后,测试了其动态特性。由扫频结果可得,网格宽度比为2:2.5、2:3和2:3.5的弯曲作动器带宽分别为0.23Hz、0.25Hz 和 0.24Hz。扭转作动器(α = 30°、45°和60°)的带宽分别为 0.17Hz、 0.25Hz 和 0.31Hz。对弯曲和扭转作动器做了不同控制频率的加卸载测试,探究了可重复性与加载频率的影响。循环曲线所包围的面积随加载频率的增加而增大。
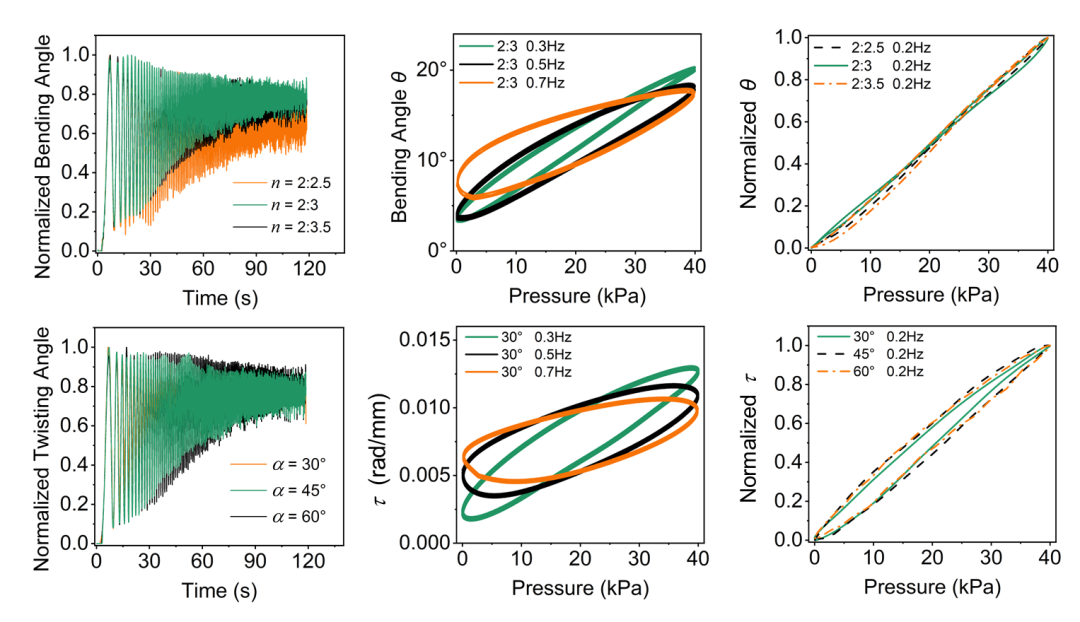 图6 扭转和弯曲作动器的扫频和循环特性
图6 扭转和弯曲作动器的扫频和循环特性
测试了弯曲作动器的径向输出力和扭转作动器的输出力矩。当网格宽度比n增加时,弯曲作动器的输出力也随之增加。当宽度比为2:3.5时,其最高输出力达到4.75N。对于不同的扭转作动器,力矩测试表明当α = 36°时,力矩峰值达到0.82 Nm,与模型预测和实验结果吻合。
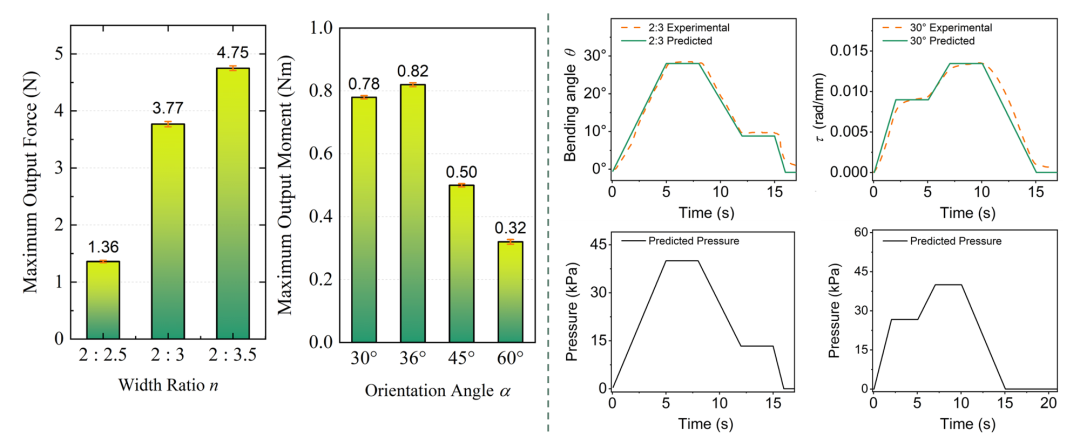 图7 扭转和弯曲作动器的静力(矩)实验
图7 扭转和弯曲作动器的静力(矩)实验
▍应用展示
在理论模型的指导下,设计了孔洞探索软机器人、壁体攀爬机器人和水下捕猎机器人。
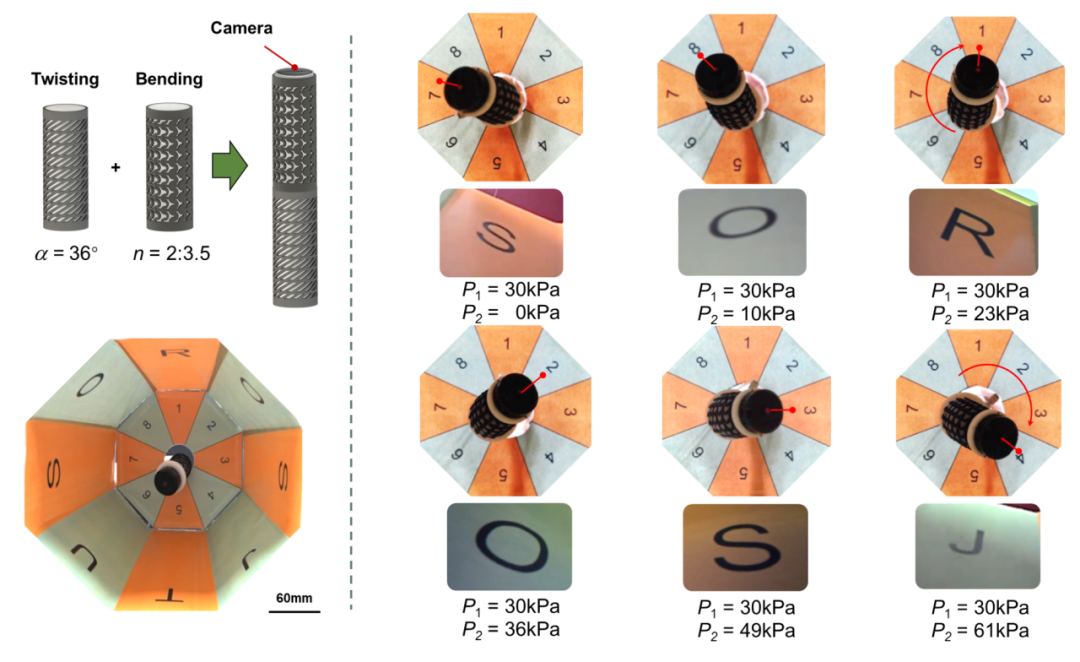 图8 孔洞探索机器人
图8 孔洞探索机器人
 图9 壁体攀爬机器人
图9 壁体攀爬机器人
 图10 水下捕猎机器人
图10 水下捕猎机器人
▍总结
提出了利用网格增强实现气动软体作动器弯曲、伸长和扭转变形的参数化设计方法,建立了基于几何正交各向异性和材料非线性的大变形理论模型,实验验证了理论模型的准确性,系统研究了几何图案、排布方式和载荷对软体作动器静态和动态变形的影响,基于理论模型设计了多种软体机器人,证明了方法的可行性。本工作为复杂灵巧软体机器人的设计提供了新的思路。
上海交通大学王东副教授是论文的第一作者,博士研究生江承儒是论文的共同第一作者,谷国迎教授是论文的通讯作者。该论文得到了国家自然科学基金和国家重点研发计划项目资助。
论文信息:
D. Wang†, C. Jiang†, Guoying Gu*, "Modeling and Design of Lattice-Reinforced Pneumatic Soft Robots," in IEEE Transactions on Robotics, doi: 10.1109/TRO.2023.3334629.
论文链接:
[1] https://ieeexplore.ieee.org/document/10323102
来源 | SoRoSJTU



