
机器人
开发能够模仿和超越人类传感能力的自主决策机器人系统在农业、环境和安全监测领域至关重要。特别是在一些危险环境的现场检测中,需要使用具备多模态传感功能的机器人系统,以确保不会对人类的健康和安全构成威胁。由于电子皮肤具备高度的灵活性和适应性,被广泛认为是理想的人机界面,因此被广泛应用于多模态机器人传感系统中。
近期,加州理工学院(California Institute of Technology)一支研究团队开发出一款人工智能(AI)驱动的多模态机器人传感系统(M-Bot),该系统基于柔性电子皮肤人机界面(HMI),能够对温度、触觉压力和各种危险化学品进行快速、超灵敏现场分析。该研究有望提高智能机器人的感知能力,并为众多新的实用可穿戴和机器人应用铺平道路。相关研究成果已发表于 Science Robotics 期刊。
M-Bot是一款由两个全喷墨打印的柔性电子皮肤贴片组成的创新产品。这两个贴片分别是e-skin-R和e-skin-H。e-skin-R是一种高性能多模态物理化学传感器阵列,可以安装在机器人的手掌和手指上,与机器人连接在一起。而e-skin-H则由四个表面肌电信号(sEMG)电极阵列以及一对电刺激电极组成,可以与人体皮肤连接。通过人工智能(AI)技术、多模态物理化学传感和电刺激反馈控制,e-skin-R和e-skin-H形成了一个闭环的人机交互机器人传感系统。这一系统为机器人与人类之间的交互提供了更加全面和精准的感知和控制能力,为人机协同工作和合作创造了更好的条件。通过这种先进的技术,M-Bot能够实现更加自然和友好的与人类进行互动,为人们的生活和工作带来更多便利和效益。
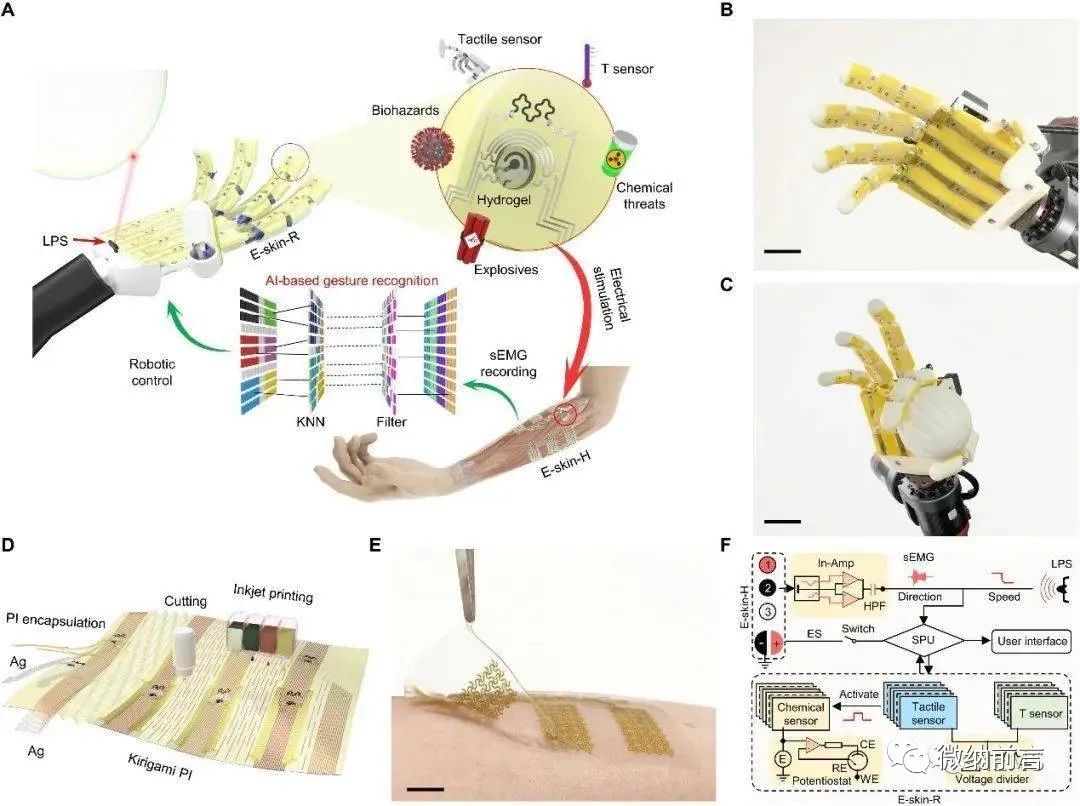
e-skin-R:全喷墨打印的多模态传感器阵列
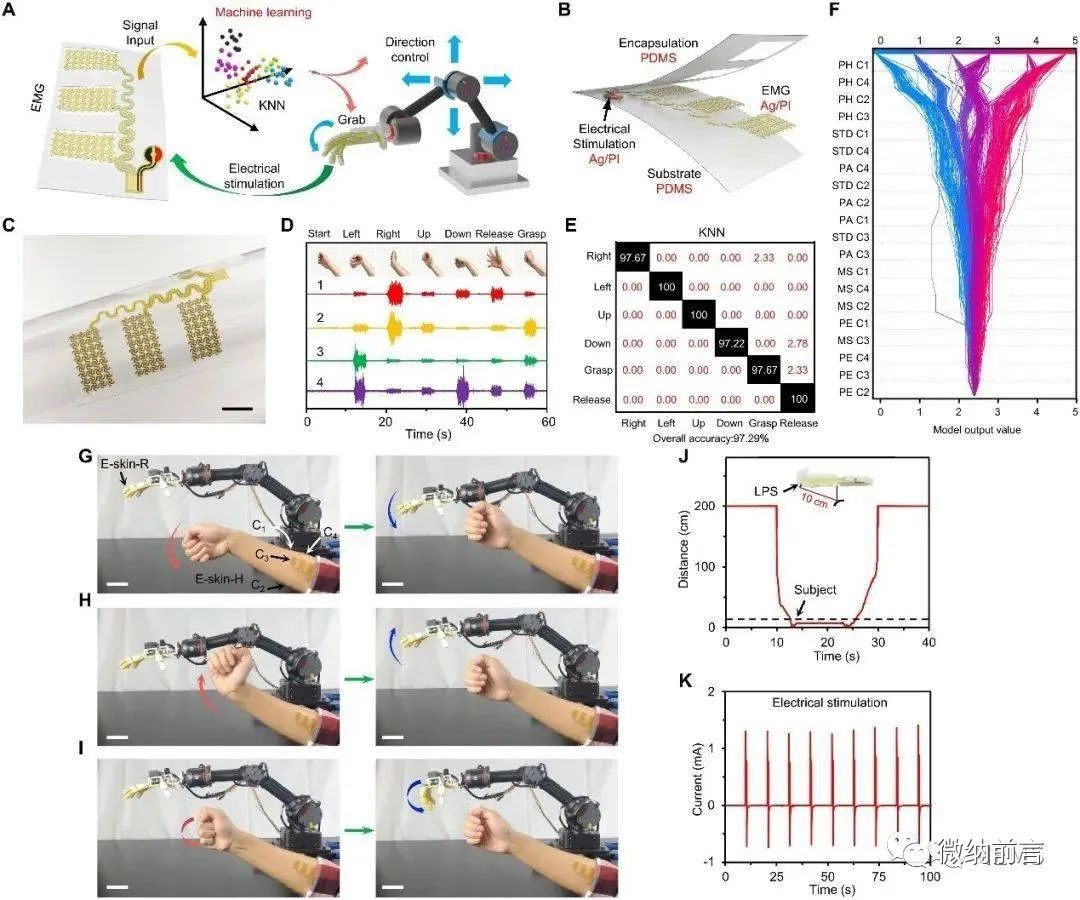
e-skin-H:用于AI辅助人机交互
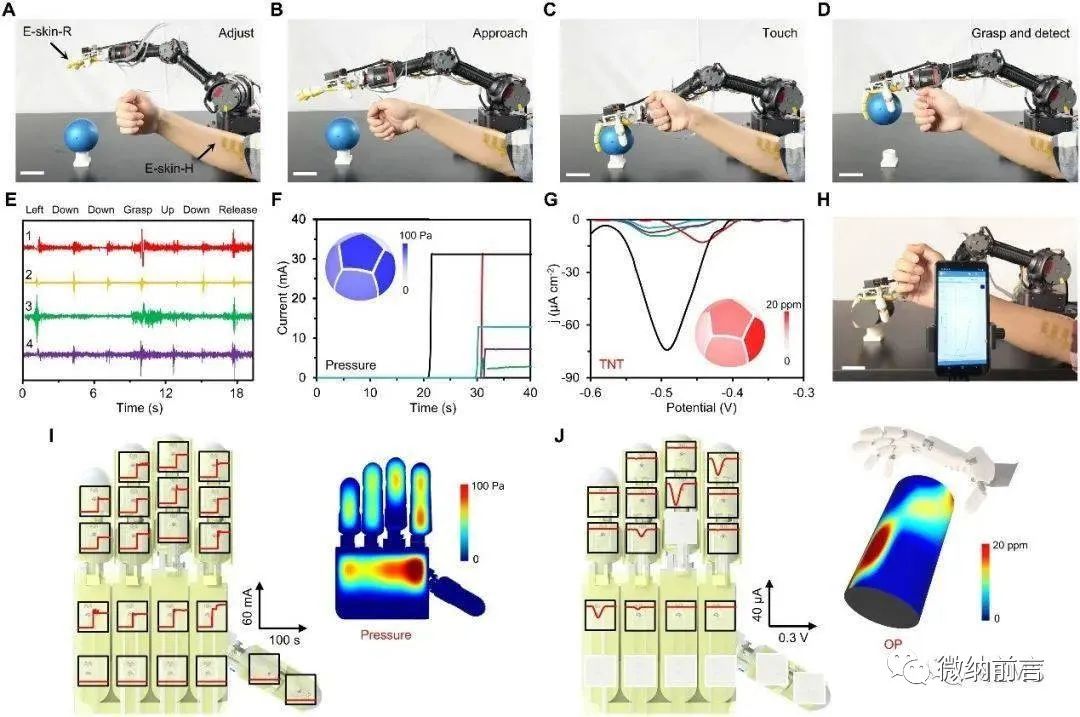
通过精准控制,M-Bot可实现高灵敏的人机互动。其多模态传感器数据可以通过一个便携式多通道恒电位仪实时采集,并无线传输显示在手机应用程序上。M-Bot还能够进行物体抓取、多点触觉和化学感应,多重物理化学数据可被同时记录并自动处理,且无信号干扰。研究人员指出,通过进一步增加多模态传感器阵列的数量和密度,将可以从任意物体和表面获得更准确、更翔实的数据。
这些功能的结合,M-Bot为科学研究提供了全新的可能性。例如,在生物医学领域,M-Bot可以用于研究人体神经系统的特征和功能。通过精确的触觉和化学感应能力,M-Bot可以收集人体的生理数据,并与其他医学设备进行联动,帮助医生进行疾病诊断和治疗方案的制定。此外,M-Bot还可以应用于材料科学领域,通过收集不同物体表面的物理化学数据,来研究材料的性能和特性。这些都为科学研究提供了更加便捷高效的工具和手段。然而,随着技术的进步,我们也需要认真考虑潜在的伦理和隐私问题。如何保护个人隐私和数据安全是一个重要的议题。在使用M-Bot的过程中,必须严格遵守相关法律法规,确保个人数据的保密和安全。同时,研究人员和开发者也要注意数据共享的透明度和公正性,向公众提供充分的信息,并遵循伦理原则进行科学研究。
总之,M-Bot的多模态传感器技术为科学研究提供了前所未有的便利和可能性。在充分考虑伦理和隐私问题的前提下,我们可以期待M-Bot在不同领域的应用,为科学进步和人类福祉做出更大的贡献。
基于M-Bot的人机交传感实验
M-Bot还可以进一步推广到用于跟踪污染物、爆炸物、化学威胁和生物危害等风险预警的机器人系统,并为用户提供互动触觉和威胁警报反馈。研究人员的实验表明,e-skin-R在多模态传感机器人船(M-Boat)上的应用具有广阔的潜力。M-Boat的感器阵列包含温度传感器、化学传感器、电动机和印刷电路板(PCB),这些组件可以实现海水中连续的危害分析和自主泄漏跟踪。此外,根据需要,研究人员还可以将更多生物传感器(如pH和电导率传感器)集成到e-skin-R中,并引入更多用于精确分析的实时校准机制。
未来,M-Boat系统有望在自动驾驶领域得到应用。它可以为汽车提供智能路径规划和决策的解决方案。这将有助于提高汽车自动驾驶技术的安全性和效率。然而,在应用于实际场景之前,还需要更多的研究和测试来确保系统的可靠性和稳定性,e-skin-R在多模态传感机器人船上的应用为危害分析和自主泄漏跟踪提供了一种创新的解决方案。它的发展潜力令人期待,并为未来的自动驾驶技术发展带来了新的可能性。
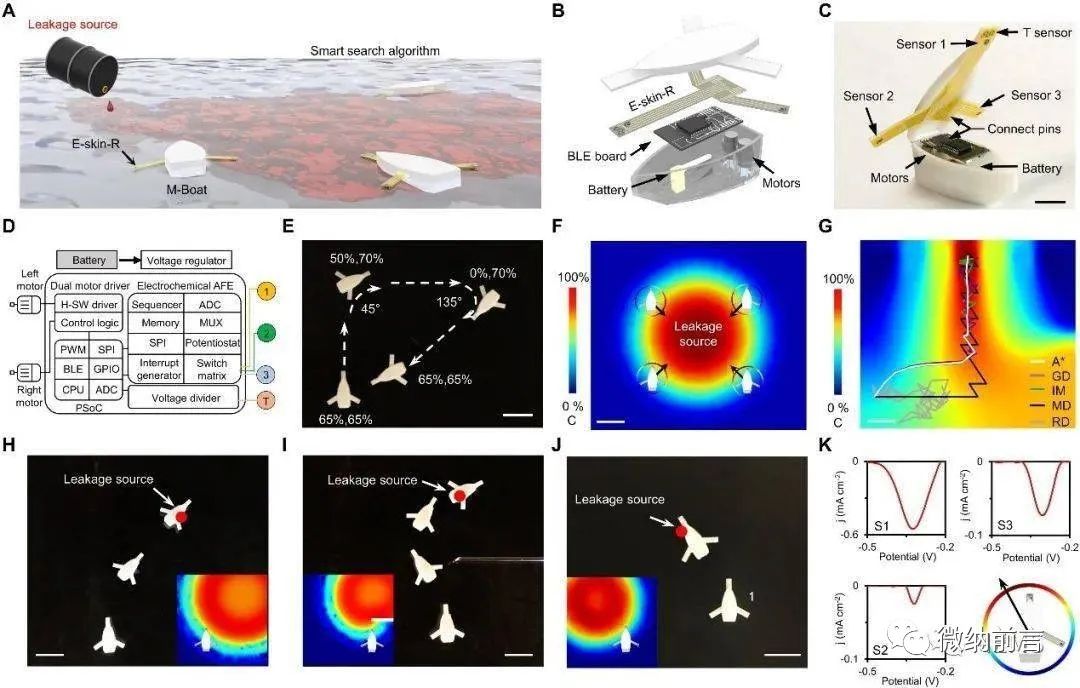
e-skin-R技术可应用于多模态传感机器人船(M-Boat)
M-Bot为机器人自主决策提供了更深层次的交互认知能力,并极大拓宽了机器人可执行的任务范围。该技术策略将在设计更先进的智能机器人系统中发挥重要作用。
多模态机器人传感系统具有以下优点:
1. 多模态感知能力:多模态机器人传感系统可以同时收集多种不同类型的信息,例如视觉、听觉、触觉、嗅觉等,从而提供更全面、准确的环境感知。
2. 高灵活性:多模态机器人传感系统可以根据任务需求和环境变化灵活调整感知方式和策略,以适应不同的任务和场景。
3. 高可靠性:多模态机器人传感系统可以通过多个传感器的协同工作和数据融合,提高感知结果的可靠性和准确性。
4. 人机交互友好:多模态机器人传感系统可以通过人机交互界面,例如语音、图像、手势等,实现人机之间的自然交互和协作。
5. 自主决策能力:多模态机器人传感系统可以通过数据分析和机器学习算法,实现自主决策和智能控制,提高机器人的自主性和智能化水平。
综上所述,多模态机器人传感系统具有多模态感知、高灵活性、高可靠性、人机交互友好和自主决策能力等优点,是实现机器人智能化和自主化的重要技术手段之一。



