
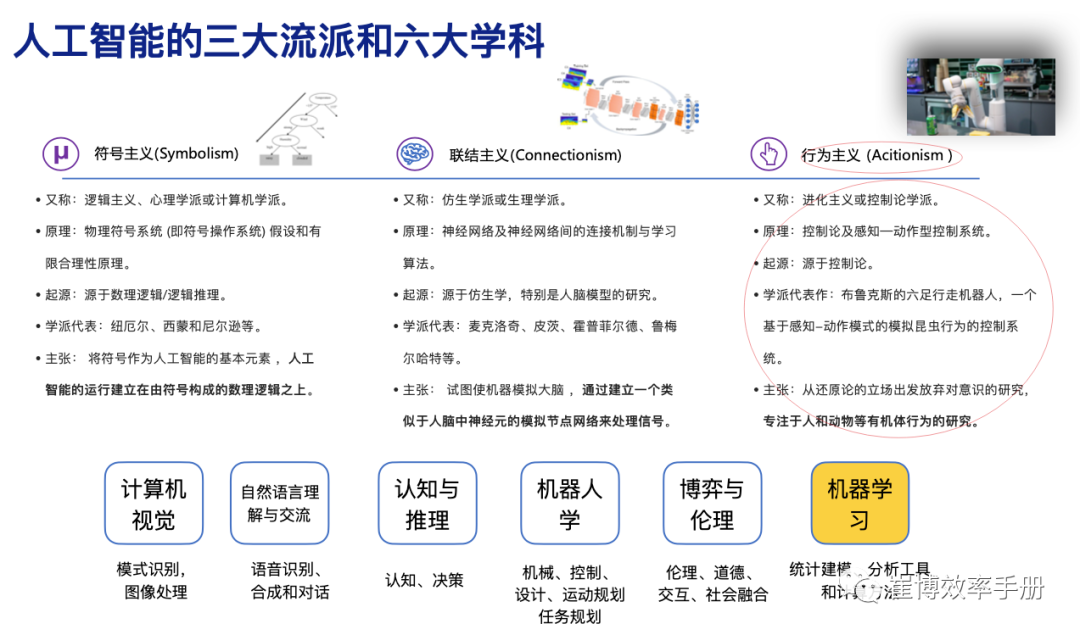
作为人工智能技术的一个重要流派分支(“行为主义”),机器人一直是产业界和学术界研究的重点方向。过去几十年中,以机器手、AGV为代表的工业机器人在汽车、物流等领域已经得到广泛应用,下面是我对“行为主义”学派的一个大致介绍。
不过就我们概念中的“机器人”而言,大家还是更习惯于科幻电影、小说中的“人形机器人”(Humanoid)。从波士顿动力的“机器狗”和Atlas开始,人形机器人开始进入正式的商业视野。
去年,特斯拉也推出了自己的人形机器人——“擎天柱”(Optimus),我也在我的视频号上一直关注这方面的进展:
那么具体而言,人形机器人的制造和开发,有哪些难点或者特点呢?
下面是我的一点小结:
人形机器人的制造,是一个艰巨的工程问题:不仅涉及到编写机器人的程序(大脑),更涉及到如何让它的身体掌握运动的两个基本原则:平衡(明确身体各部位的位置)和动作控制(掌握各部位间移动的关系)。
因此,人形机器人代表了机器人技术的终极目标之一,需要跨越多个学科:运动控制、生物力学、人工智能、机器视觉、感知、学习与认知发展,以及行为研究等。
1、骨骼结构
人形机器人需要坚固的骨骼结构和驱动器,能够承受数百公斤的重物,同时移动精度控制在0.1毫米以内。这相当于一名举重运动员既能举起270公斤的重物,把7公斤的铅球投出16米,又能用同一只手穿针引线、系鞋带或者弹钢琴。
为实现这样的人形机器人,执行器(actuator)必须捕捉到这种动态活动范围,可以采用的方式包括电磁(旋转和线性)执行器、液压/气动活塞、人工液压肌肉或人工电动肌肉等。
2、面部表情
人形机器人的一个特点,是“像人”。要实现说话和适当的面部表情,我们需要面部精密制动器,能够移动得足够”远“,产生正确的面部动作,并且移动得足够快,足够准确,才能让这些动作看起来逼真。伺服系统体积庞大,难以安装,因此需要人造电肌肉作为最佳解决方案。
3、重量与功率比
为机器人配置功能强大的执行器需要大量能量。为了获得足够的动力,我们需要增加更多重量,但这最终可能导致机器人不堪重负。我们需要更轻、更强的驱动器,以及一种能够让人形机器人运行一整天(10 小时)并能快速充电的能源。
锂离子电池体积大、重量重、充电时间长。也不能使用化石燃料,因为这会噪音大、耗能高。另一种选择是使用氢燃料电池,但是价格昂贵。目前看来,甲醇燃料电池是一种不错的选项。

下面是一个机器人因为没电而“累倒”的知名视频:
3、AI 与运动规划
这是机器人领域最复杂的问题。人形机器人需要整合传感器输入,创建环境模型,并确定目标(其实有点类似于扫地机器人的工作流程,但是人形机器人面临的现实环境要远远比室内复杂得多)。它还要决定怎么实现这些目标,规划运动方式,并判断和周围的人、物体互动的方式。在做好决策之后,机器人会向电机控制器发送命令,确定怎么移动执行器和驱动四肢。

4、AI 与互动
人形机器人还必须能听懂口头指令,与人交谈、互动。这方面,随着ChatGPT这样的大语言模型的推出,这几年有了长足的进步。
综合而言,在仿生设计、稳定性和自主控制、崎岖地形的自适应行走和自然步态、避免跌倒的稳健控制、自适应行为、机器人学习能力、实时视觉识别和理解、多机器人协作、人 - 机器人协调、人类心理等等方面,人形机器人需要进行大量的研究和发展。尽管研究人员在某些领域取得了巨大进展,但仍有很长的路要走。



