
哈工大冷劲松教授团队的一项柔性机器人的研究《Multifunctional Soft Stackable Robots by Netting-Rolling- Splicing Pneumatic Artificial Muscles》在线发表在机器人领域的著名期刊Soft Robotics,在这项工作中作者基于模块化的气动人工肌肉的柔顺特性利用一种简单的网状卷曲拼接的堆叠方法将2D拓扑结构升维至3D结构,并基于此实现了多种功能并达到了最佳的综合性能。
在未知和不可预测的环境中,越来越需要具有多种功能的软体机器人来实现安全、自适应和自主功能。机器人堆垛是一种很有前途的解决方案,它可以增加软体机器人的功能多样性,以实现安全的人机交互和适应非结构化环境。然而,现有的大多数多功能软机器人功能有限,或者没有充分显示出机器人堆垛方法的优越性。在此,我们提出了一种新颖的机器人堆叠策略——网状卷曲拼接(Netting-Rolling-Splicing, NRS),一种基于网状堆叠式气动人工肌肉的2d 结构经过卷曲-拼接提升3D维度的方法,从而基于相同的、简单的、低成本的模块快速高效地制造多功能软体机器人。
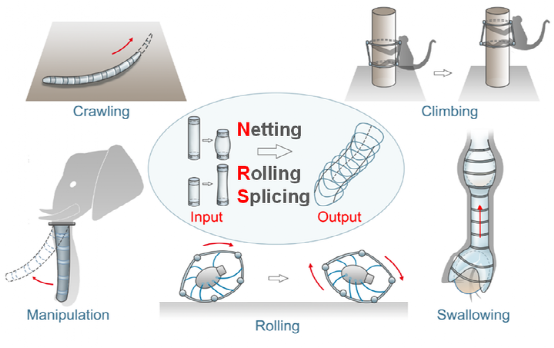
图1:具有五种仿生模式的模块化'多面手'软机器人
▍网状卷曲拼接机器人
在这里,“网状” (Netting) 被定义为在两个垂直方向,以模块化驱动器的矩形单元为基础连接形成二维驱动器网格结构。“卷曲” (Rolling) 被定义为基于气动肌肉的柔顺性在一个方向上弯曲2D驱动器网格结构。“拼接” (Splicing) 被定义为将卷曲的二维驱动器网格的两端边缘拼接/连接,以构建一个三维驱动器结构,如图2所示。通过输入匹配的驱动器,选择不同的矩形单元,调整单元阵列排列,可以在“Netting”步骤中对NRS机器人的构型和功能进行编程。通过控制3D驱动结构的变形和刚度,机器人可以执行不同的任务。这些驱动器可以分为“截面” (Sectional) 驱动器和“轴向” (axial) 驱动器,它们在机器人的驱动中具有不同的作用。例如,截面驱动器不仅可以改变截面尺度,还可以改变截面形状; 轴向驱动器不仅可以改变轴向长度,还可以改变沿长度的曲率 (图3)。

图2:网状卷曲拼接(Netting-Rolling-Splicing, NRS)
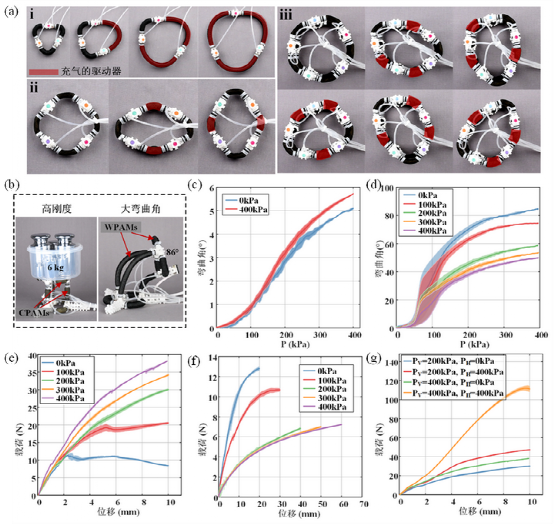
图3:纵向与横向驱动器测试
▍爬行机器人
爬行是移动机器人的基本运动功能之一。受蠕虫的启发,TriUnit也可以用于简单的单向爬行。由于WPAMs可以实现更大的膨胀行程,具有三根轴向WPAMs的TriUnit爬行器 (配备单向车轮) 比具有三根轴向CPAMs的TriUnit爬行得更快。CPAM和WPAM履带式机器人的控制策略灵感来自于毛毛虫的身体爬行和脚定位,如图所示,其中单节TriUnit仅使用轴向驱动器进行爬行。而以蚯蚓为灵感的波动爬行运动也可以通过堆叠多个TriUnits来实现,不需要单向轮等单向结构,如图4。
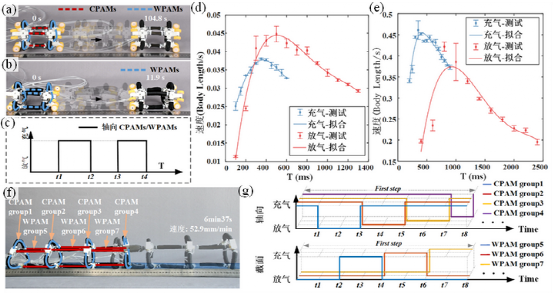
图4 爬行机器人
TriUnit爬行机器人,每秒能爬0.46±0.022个体长,拥有两种爬行模式单向振荡爬行和行波蠕动爬行。
TriUnit震荡与行波爬行机器人
▍攀爬机器人
攀爬是移动机器人的另一种不同寻常的运动能力,它们可以在各种3D表面上移动来执行给定的任务。TriUnit还可以用于管外和管内爬升 (其步态如图所示)。不过具有三根轴向CPAM的TriUnit 比具有三根轴向WPAM的TriUnit 爬升得慢得多。基于CPAM和WPAM的攀爬机器人的运动基于释放、收缩/伸展和拥抱的动作,其灵感来自猴子的手臂或腿部夹紧和释放动作,分别如图5所示。图5c所示驱动序列同样适用于WPAM攀爬机器人的向下攀爬,图5d所示驱动序列同样适用于CPAM攀爬机器人的向下攀爬。
此外,通过改变控制策略,可以实现更多的运动方式。如图5g所示,具有轴向WPAMs的TriUnit在攀爬管柱时,还能以1.6°/s的速度实现顺时针和逆时针旋转。它的旋转运动依赖于所有9个驱动器的独立控制和它们的不对称运动,这是受到猴子在横向树状运动时肢体和脊柱的协作运动启发 (图5h)。
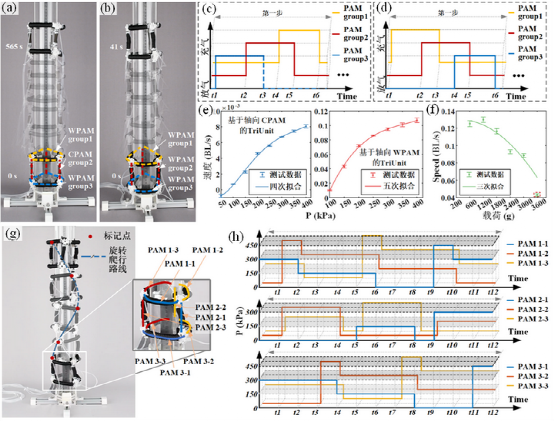
图5:攀爬机器人
全向攀爬机器人
TriUnit垂直攀爬时能携带3公斤的有效载荷,还可用于实现新型的全方位爬管,包括旋转爬管,并基于它们的多模态组合进行仿生吞咽、多自由度操作。
▍吞咽机器人
吞咽是许多生物摄取食物的基本能力。机器人吞咽器可用于抓取和运输物品。虽然已有一些关于包覆抓取和内穿运输的出色研究成果,目前还缺乏结合抓取和运输的吞咽/反刍多功能软机器人。其他一些基于刚性结构的吞咽机器人,由于刚性运动的限制,机器人的适应性和多功能性较为受限。
在这项工作中,基于TriUnits的吞咽机器人能够用于包覆抓取和内穿运输。本研究中的机器人吞咽机器人不仅可以实现吞咽和储存,还可以实现类动物的反刍和内部物质运输。为了更好的可视化,我们将三个TriUnit堆叠在一起,形成一个垂直的机器人吞咽器,其中两个TriUnit,一个基于WPAMs和CPAMs,另一个TriUnit则完全基于WPAMs。如图6a为一个直径120毫米、重89克的3D打印球被机器人吞下。吞咽运动受蛇吞咽的启发,是通过截面和轴向PAM的不断挤压和推动来实现的,由1-6组气动肌肉的连续膨胀和收缩来实现的,如图6所示。

图6:吞咽机器人

吞咽与反刍机器人
▍滚动机器人
滚动是动物中罕见的运动能力,理论上可将多个全向弯曲单元 (如TriUnits) 堆叠用于垂直滚动步态。但假如只有一个单元,滚动将变得更具挑战性,因为机器人需要大幅改变重心。为了实现这一目标,本研究在设计中采用了初始二维驱动器网格的横向叠加,而不是轴向叠加。首先,测试了基于四边形单元的NRS单元 (简称QuadUnit)。QuadUnit具有一个形状自由度,重心的变化范围可以满足滚动的要求。但是它的对称结构使得滚动行为更加随机,这限制了滚动的可控性,使得它只适用于动态滚动[而不是静态滚动。
本研究采用基于NRS单元的五边形单元 (简称PenUnit) 进行机器人滚动,该单元具有两个形状自由度,结构更复杂,但具有更高的可控性。PenUnit实现了速度为0.28 BL/s的静态稳定滚动,如图所示,其中使用了5组“截面”CPAM。滚动运动受到轮蜘蛛的启发,依赖于截面轮廓的变换,通过5组CPAM按顺序充放气来控制刚度的顺序变化来实现,如图7所示。
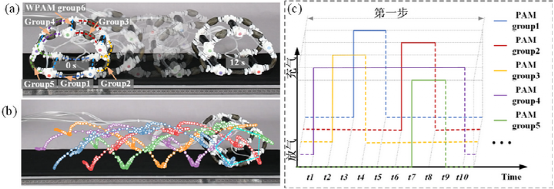
图7:滚动机器人
PenUnit滚动机器人
▍多冗余与吞咽柔性臂机器人
受到象鼻的灵巧操作能力和蛇的吞咽能力的启发,本文将四个基于CPAMs的TriUnits (以实现足够大的弯曲角度范围和负载承载能力) 和三个基于WPAMs的TriUnits (以实现良好的吞咽和抓取) 堆叠为一个多功能柔性臂。其具有较高的操作灵活性,并具有28个自由度 (轴向PAM组为21自由度,截面PAM组为7自由度)。因此,该柔性臂不仅可以实现简单的多自由度操作运动 (图8a和图8b),还可以实现抓取、搬运、吞咽、储存等多模式操作,如图8c-e所示。如图8c所示,NRS柔性臂可以抓取放置在圆柱体 (82 g,外径130mm,高度90mm) 中的1公斤有效载荷。该柔性臂还展示了透明塑料球 (70g,直径120mm) 的取放 (图3 26d)。此外,其还可以像蛇一样同时吞咽、运输和储存物质。例如,吞下一个椭球 (125g,130mm×180mm),并运输储存到体内后,继续抓去另一个球体 (89g,直径120mm) 并吞下 (图8)。
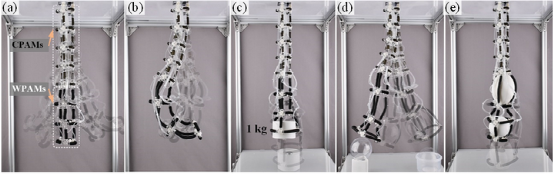
图8:多冗余与吞咽柔性臂机器人
多冗余与吞咽柔性臂机器人
▍全景拍摄和货物转移
并且我们将TriUnit爬管机器人应用于全景拍摄和货物转移,以验证机器人对不同任务的适应性。NRS堆叠驱动软机器人在现有的堆叠式软机器人中表现出最佳的综合性能,代表了一种新的、有效的方法,以经济有效的方式构建多功能和多模态软机器人,如图9。
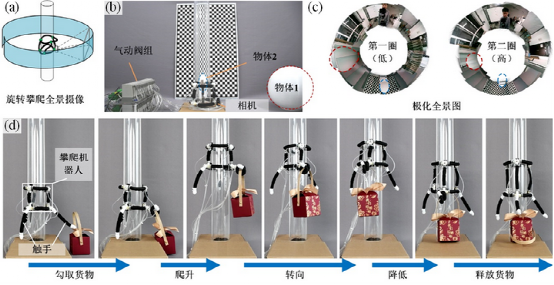
图9:全景拍摄和货物转移

全景拍摄机器人
载荷转运机器人
-----------------END-------------------



