
“现在一款新机型的研发周期是多长?”在前不久举行的一个行业会议上,记者问了研发工程师这样一个问题。
“几年前可能需要24个月左右。但现在借助虚拟仿真软件,机器人的研发周期可以缩短三分之一,需要试制的零部件减少了,研发成本也得以大幅降低。”她回答道。
目前,多家企业的研发人员已经愈发认可了虚拟仿真软件在实际应用中帮助企业降本增效的能力与价值。
虚拟仿真在新型工业化下的国内外机器人研发中正起着愈发重要的作用,尤其是在新技术的导入方面更是一个“加速器”。这点在虚拟仿真技术被美国制裁后近几年愈发成为国内机器人行业的共识。
▍虚拟仿真意义愈发凸显
在工业领域,机器人行业普遍对新技术比较敏感,应用虚拟仿真技术早已不是什么新鲜事。
虚拟仿真软件是一种基于计算机仿真技术的虚拟仿真实验教学系统,主要利用计算机及网络技术,构建出一个可以真实模拟现实世界的虚拟实验环境,实现对虚拟实验的虚拟操作,以及对虚拟实验结果的显示和交互操作。
成本考量是国内工业化和实验室早期采用虚拟仿真软件和系统的重要推动力。
就现实情况而言,由于构建用于实验和教学的物理机器人套件可能非常昂贵、耗时且占用资源,虚拟仿真经常与实时控制系统结合,可以更加有效地预测和模拟机器人的模型,使用仿真软件能减少对物理硬件生产的需求以及相关的环境影响,而且仿真软件可以轻松地放大或缩小模型,使研究人员能够研究机器人在各种场景和环境中的行为,大幅减少了重复投入。
这不仅提供了研究人员测试和完善机器人设计和算法的新方式,而且虚拟仿真能为机器人实际测试和调试提供了一个安全的环境,没有损坏设备或造成伤害的风险,研发人员甚至无需物理原型,节省了大量时间和金钱。
原先,国内机器人虚拟仿真相关技术主要应用在两个方面。
一是机器人本身的设计和研究,包括机器人的机械结构以及机器人的控制系统、机器人的运动学和动力学分析、各种规划和控制方法的研究等。机器人虚拟仿真可为这些研究提供灵活和方便的研究工具,它的用户主要是从事机器人设计和研究的部门和高等学校。
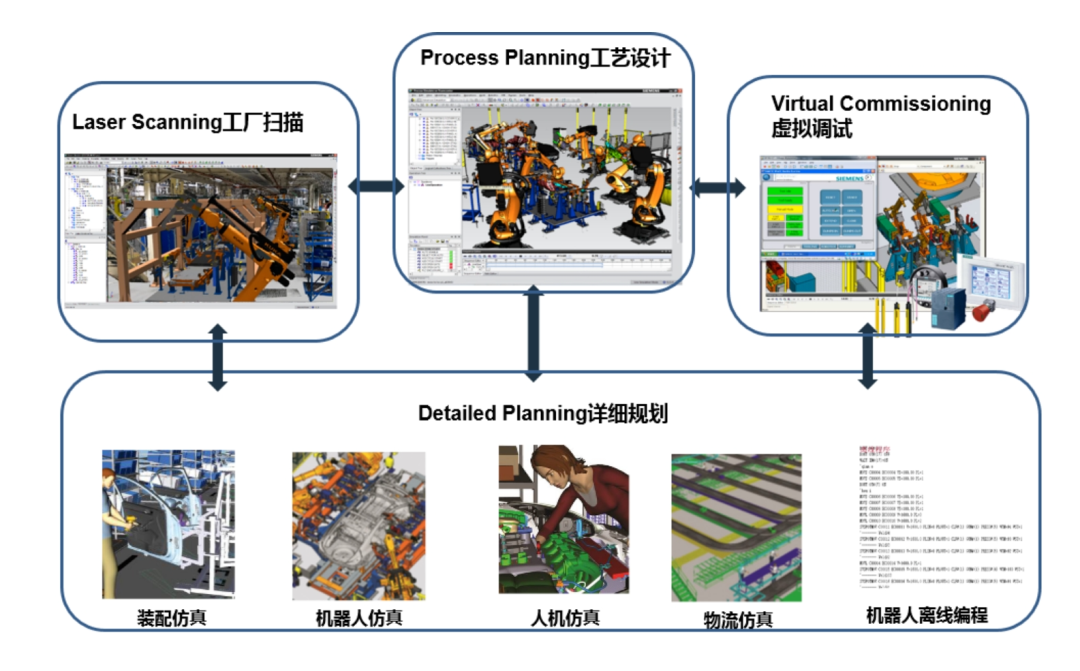
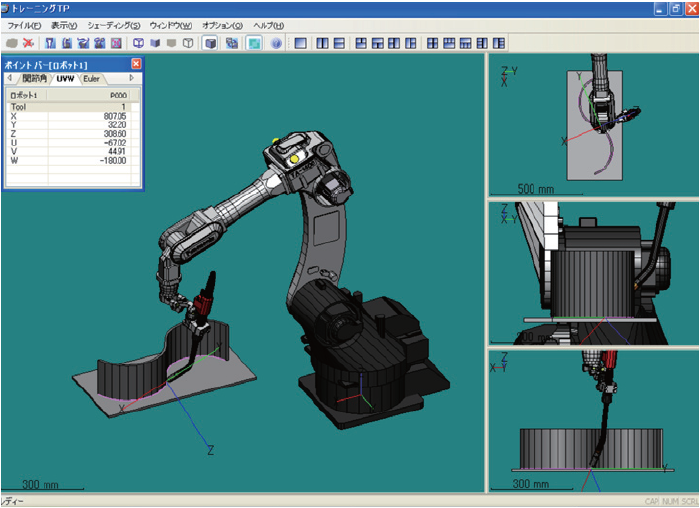
机器人仿真的第二个方面的主要应用是那些以机器人为主体的自动化生产线,机器人仿真系统进行离线编程在国外已十分普遍。包括机器人工作站的设计、机器人的选型、离线编程和碰撞检测等,机器人仿真软件与系统可为此提供既经济又安全的设计和试验的手段,它的用户主要是那些使用机器人的产业部门。
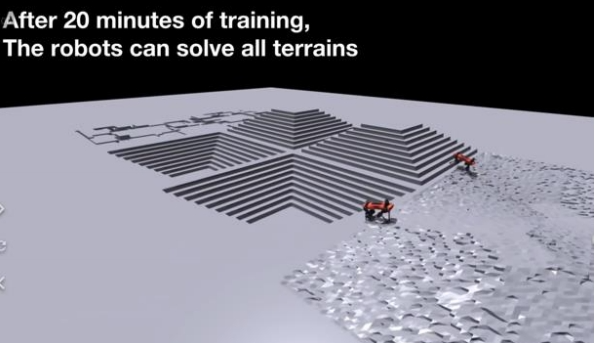
如今,通过在仿真环境中运行机器人模型已经成为国内企业新技术开发与测试的重要一环,虚拟仿真中的数据也具有非常多的实际价值。技术递进帮助该领域获得了更多的发展价值。例如强化学习要求大规模训练集,通过模拟虚拟环境,虚拟机器人能够以更快的速度进行大规模学习。
将虚拟仿真技术与实时控制技术结合,可以获得机器人在特定情况下的一系列行为,这有助于研发团队预测并理解机器人的表现。通过实时仿真,意味着研发人员可以在实际制造机器人之前发现和修复潜在的问题,这种预测试可以提高最终产品的质量。
▍虚拟仿真应用面大幅扩展
在新技术快速发展的当下,虚拟仿真还被用于优化机器人的性能。
例如针对核心零部件的仿真和优化目前已经成为机器人厂商和零部件厂商共同攻关的核心方向。研究人员可以使用虚拟仿真构建极端或罕见的场景测试机器人,这些场景在物理世界中大多难以重现,但这种冗余研发确保了机器人的鲁棒性和耐用性并能够更好处理意外情况,对机器人的研发起到了重要作用。
因为模拟仿真提供了大量的数据,可以通过分析这些数据来微调机器人的行为。研究人员可以通过改变机器人的参数或在仿真中尝试不同的策略,找出最佳的操作模式或控制策略,收集和分析有关机器人运动、传感器读数以及与环境交互的数据,帮助改进算法和控制策略,快速修改机器人设计、参数和算法,从而提高机器人的效率或性能。
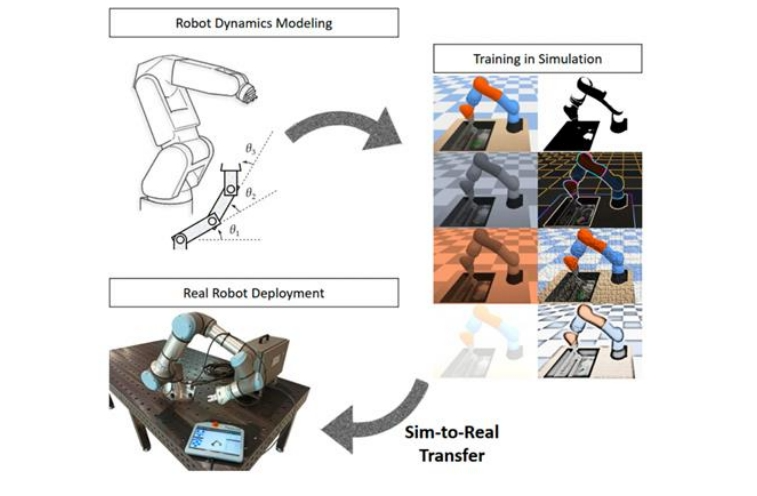
例如目前深度学习、大语言模型等算法不断演化,就在机器人上实现了较好的应用,探索了各种可能性并优化性能,强化学习算法已经可以将在虚拟仿真环境中学习到的行为转移到物理机器人之前进行模拟训练,而遥操作等技术也已经在许多厂商的机器人上成为了可能。
虚拟仿真对于机器人的人机交互研究也非常有用。研究人员可以尝试不同的控制策略并评估其在受控环境中的表现,通过模拟人类的行为和反应,能够更好评估和改进机器人如何与人类交互,从而提高机器人的易用性和用户体验。研究领域上许多相应论文都表面了这种趋势。
当然,虚拟仿真配合实时控制系统还是教育和培训的重要工具。它可以被用来教授和演示机器人基础的操作和控制的技巧,或者用来训练操作员如何使用和维护机器人。目前借助VR等先进技术,也实现了远程维护等新的方式。
在原先,受限于芯片技术算力问题,虚拟仿真的瓶颈在于真实环境受到多种物理规律的约束,仿真器无法准确地建模真实环境,在仿真到真实环境迁移(Sim2Real)过程中存在差异或者 GAP,但2021年左右英伟达等公司通过强化学习仿真环境,使得在同一个 GPU 中可以同时进行数千个机器人的仿真训练学习,加快了数据采集的时间,让该技术再次走向了加速发展期。

从行业的整体发展趋势来看,欧美部分先进的虚拟模拟软件及配套产品已经可以重新创建高度真实的环境,包括摩擦、重力和碰撞等物理属性,这种加入现实属性的方式更是有助于研究人员评估机器人在现实条件下的表现。
同时,在虚拟仿真的基础上,为了教学和科研需要,还形成了实时仿真控制系统这种半实物仿真与控制融合的系统,主要用于快速控制原型(RCP)与硬件在环仿真(HIL)两大功能。例如中科深谷最新研发的CSPACE-RT,就基于模型设计的方法,将仿真建模与实际研发产品结合,引入高可靠性的实时软硬件环境做技术保障,提供快速原型控制全套解决方案,针对不同的应用场景,该系统还提供多种类型实时仿真机,以减少实际的多场景开发成本。
除此之外,当前很多头部公司均推出自己的仿真训练平台,例如 Unity 的 Machine Learning Agents,微软的 AirSim,英伟达的 IsaacSim 等,在积极构建自身生态的同时,客观上降低了机器人开发的门槛。
同时 Gazebo、CoppeliaSim 和 Webots 等开源软件的逐渐普及提供了低成本、高定制性和广泛的社区支持,更低成本的云端仿真也被越来越多的机器人仿真软件开始采用。值得一提的是由我国北京华航唯实机器人科技股份有限公司推出的工业机器人离线编程仿真软件 PQArt 也有不错的表现。

▍结语与未来
综合而言,实时仿真控制软件和系统在当下已经取得了高速发展,其对于机器人研发具有重要作用。
因为它不仅可以提高效率、降低成本,还可以提高机器人的性能和易用性,为设计、测试和改进机器人及其相关算法提供了一个经济高效、安全且多功能的平台,能够加速创新,使研究人员能够探索广泛的场景和挑战,同时最大限度地减少资源消耗和安全风险。
在国家重大科技产业发展战略背景下,国产虚拟仿真软件与实时控制系统正得到越来越高的重视。国内从80年代后期起,许多单位就开始从事机器人仿真技术的研究工作,当前国内的虚拟仿真软件与相关技术可以说已经迎来了爆发式发展阶段,为推动我国机器人研发做出了重要贡献。
在新的发展格局下,机器人虚拟仿真软件展示出了三大面向未来的特性和需求。
例如随着机器人技术的不断发展,机器人虚拟仿真软件需要提高模拟精度,以更好地模拟机器人的运动和操作。这可能需要通过采用更加复杂的物理模型和仿真算法来实现。
又例如随着机器人技术的不断发展,多智能体系统已经成为机器人应用的重要方向。因此,部分机器人虚拟仿真软件目前也增加了对多智能体系统的仿真和测试功能,以更好地模拟多机器人协同工作的场景。
同时,人工智能和机器学习必然会在未来的仿真软件中可能会扮演重要角色。机器学习引擎可以监控工程师对仿真工具的使用,包括他们如何使用仿真工具以及设置哪些参数,然后在一定程度上为经验不足的工程师准确地重新创建仿真工具,并使他们能够使用该工具。
为了从机器人研究者的角度客观地评价这些仿真软件,目前国内也在积极制定相关统一的行业标准,确定评估机器人仿真平台的基本量,这将对于仿真软件下一步的逼真度、可扩展性、开发简易性和成本都会有更加综合的提升。
-----------------END-------------------



