
提到无人机,想必大家都不陌生。
随着无人机技术的不断进步和应用的不断开发,在拍照摄影、农林植保、警用巡逻、物流快递等诸多应用场景,我们常常都能见到无人机的身影。
固定翼、双旋翼、四旋翼、多旋翼等各类无人机已在各个领域被广泛应用,大家对此也已经非常了解。

只是,单旋翼的无人机,大家有见过么?
单旋翼无人机主要由单个螺旋桨完成提升和操纵无人机的所有工作。由于设计结构原因,单旋翼无人机无法形成完美的平衡,因此需要复杂的控制系统来进行稳定,同时,单旋翼无人机的操纵通常依赖于改变螺旋桨的转速来实现,这就会产生“桨距效应”。桨距效应使得无人机在改变高度、方向和速度时,会有一定的延迟和误差,会影响到无人机的操纵精度。
也因此,尽管目前无人机已经非常火爆,相关的研究也有很多,但是单旋翼无人机仍然是无人机圈的稀有物种,少有企业推出此类商业化产品。
▍提出新设计,提升单翼飞行器平衡性
近日,伊朗谢里夫理工大学的研究人员进行了一项探索单翼飞行机器人系统(称为单翼飞行器)潜力的研究,并将相关研究成果发表在《智能与机器人系统杂志》上,概述了一种新方法,可以帮助在单翼飞行器在周围环境中导航时更好地控制它们的飞行。
他们首先提出了一种新的单翼飞行器设计,提高飞行器的平衡性。
在单翼飞行器的设计过程中,研究人员考虑到以往仿真结果和组装配置、组装难度、制造成本等因素,在满足单翼飞行器简单、机动性、尺寸小、垂直起飞和起降、可实现陀螺刚性的固有稳定性等相关必要标准的基础上,提出了一种具有固有姿态稳定性的新配置,如图a所示。
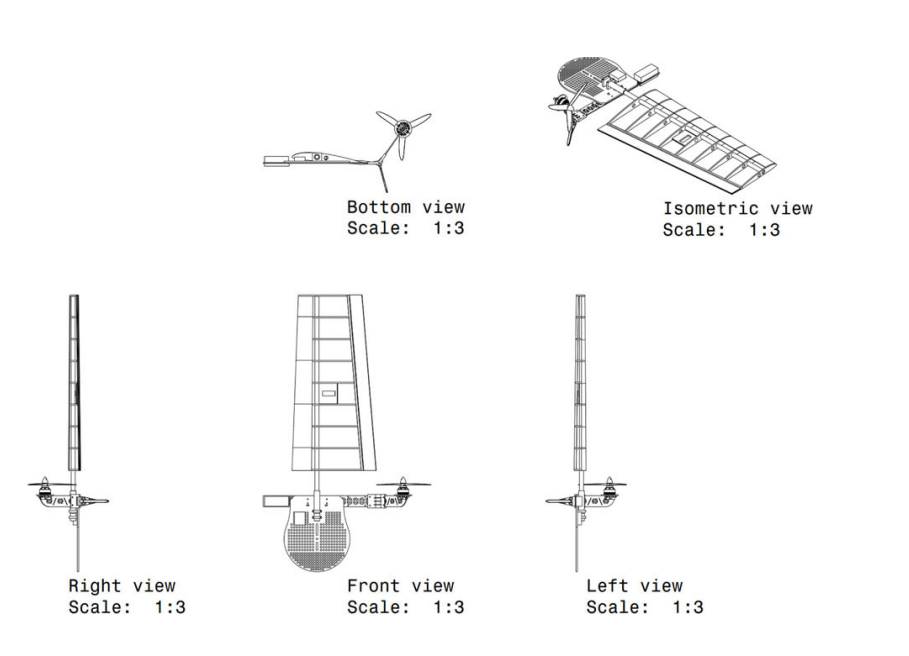
单翼飞行器三视图
基于悬停飞行的设计目标要求。研究人员在设计机翼过程中,将机翼产生的升力调整为大小以抵消悬停飞行中单机翼的重量。随后,使用Q-Blade软件进行了初步的气动力学计算。不同入射角的计算结果见表1。
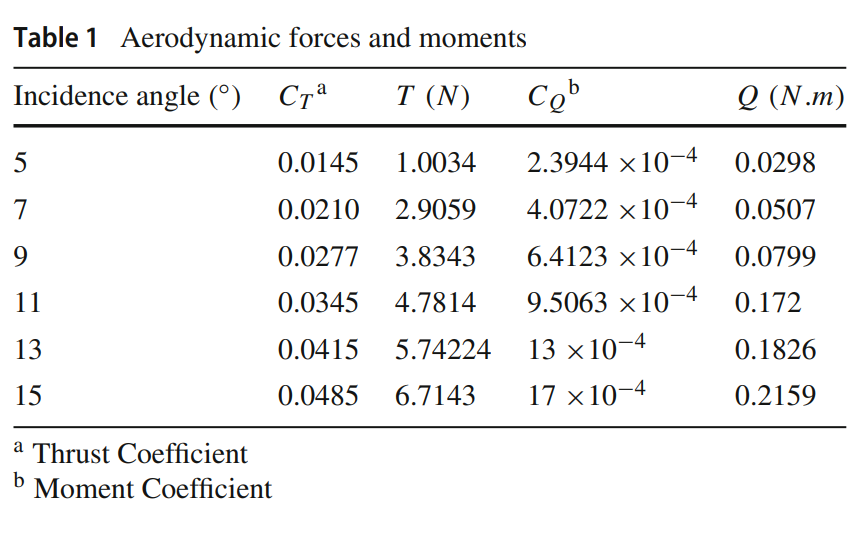
空气动力学和力矩
通过求解单翼翼在自旋阶段时的特征方程,研究人员发现单翼在z轴周围的惯性矩系数大于另一个对角线惯性矩系数时,飞行器推进力被消除具有固有稳定性。于是研究人员就机翼入射角和电机倾斜角等关键飞行参数进行了细致的灵敏度分析,并通过对机翼进行改造,实现了飞行器的稳定悬停飞行。
单翼飞行器的设计与实现
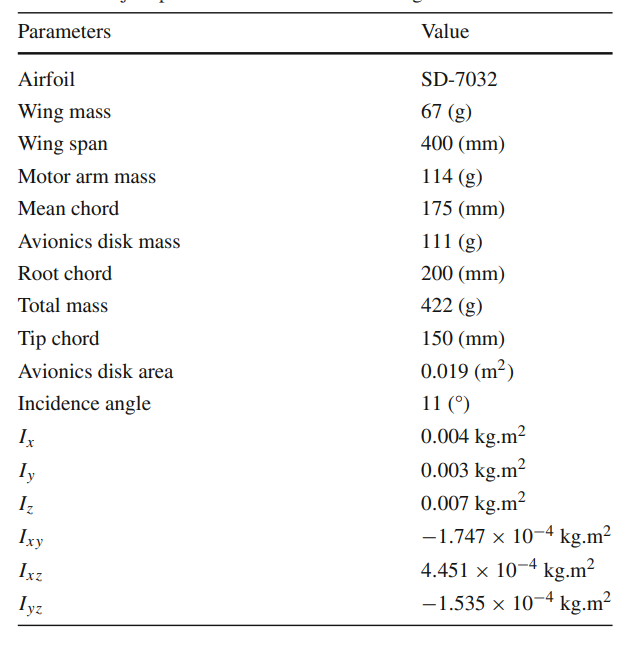
单翼的主要规格
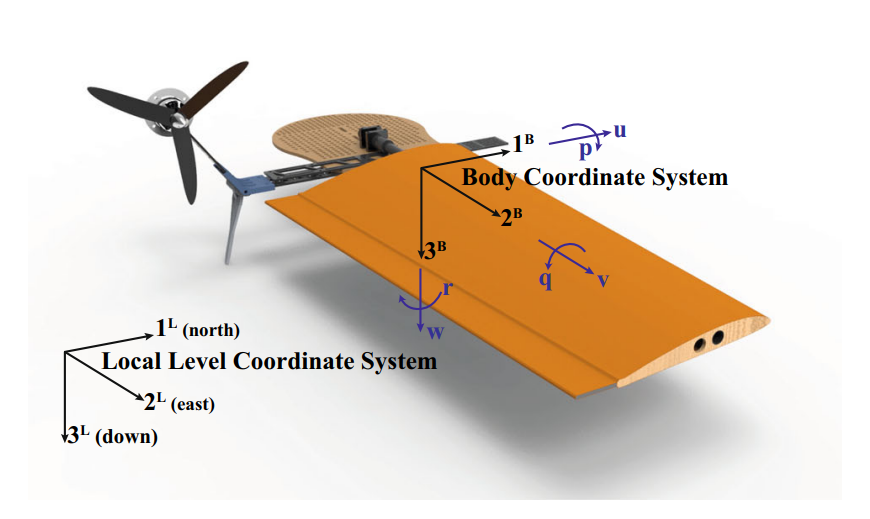
并得到具有固定姿态稳定性的工程样机,如图b所示。
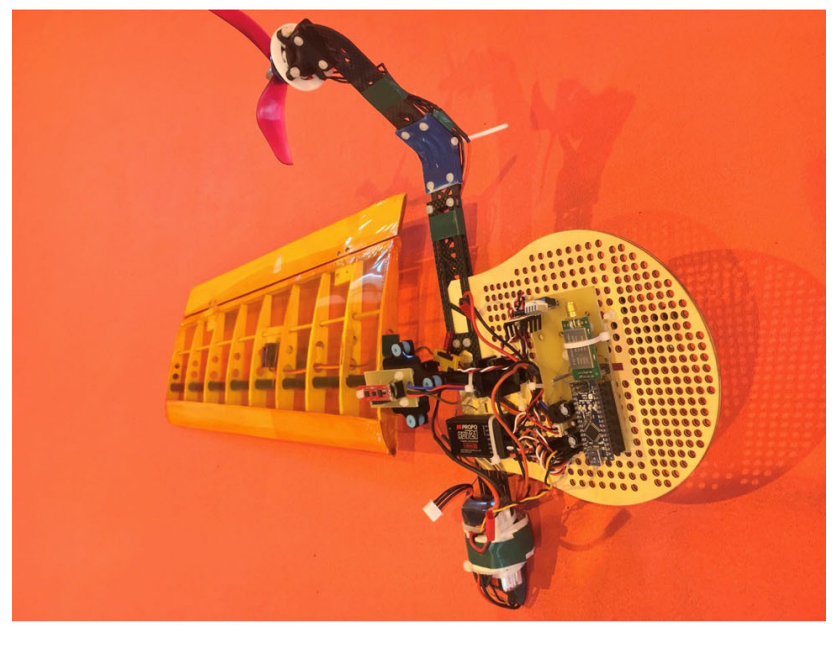
具有固有姿态稳定性的单翼飞行器模型
▍识别状态空间模型,打造有效控制器
在得到样机的基础上,为了实现在三维环境中控制单翼的速度和位置,研究人员将电机转速和襟翼两个单翼的控制输入关掉其一,选择只使用用襟翼输入,即仅机翼以高频率(40 rad/s)旋转。
此时,对襟瓣输入应用非周期性命令不能在x或y方向上提供净力矩,为了在这些方向上产生一个力矩,需要对与机翼旋转或车辆偏航率频率相同的襟翼应用控制命令。研究人员将控制命令应定义为:

公式18
ψ和ψ0分别表示偏航角和一个常数偏差,该常数偏差决定了由旋转襟翼产生的总力矩的方向, 是襟翼振幅。从下图中可以观察到当ψ= 0时,襟翼偏转为零,并且随着偏航角的增加而增加,直到ψ=
是襟翼振幅。从下图中可以观察到当ψ= 0时,襟翼偏转为零,并且随着偏航角的增加而增加,直到ψ= ;当试验在ψ=−π处向零减少时,襟翼偏转向负方向增加,直到ψ=
;当试验在ψ=−π处向零减少时,襟翼偏转向负方向增加,直到ψ= ;最后,在ψ=−2π处再次返回零。因此,在ψ=
;最后,在ψ=−2π处再次返回零。因此,在ψ= 和ψ=
和ψ= 处产生的力矩互相增强,产生沿x轴的净力矩。同理,若要产生沿y轴的净力矩,只需将ψ设置为
处产生的力矩互相增强,产生沿x轴的净力矩。同理,若要产生沿y轴的净力矩,只需将ψ设置为 。
。
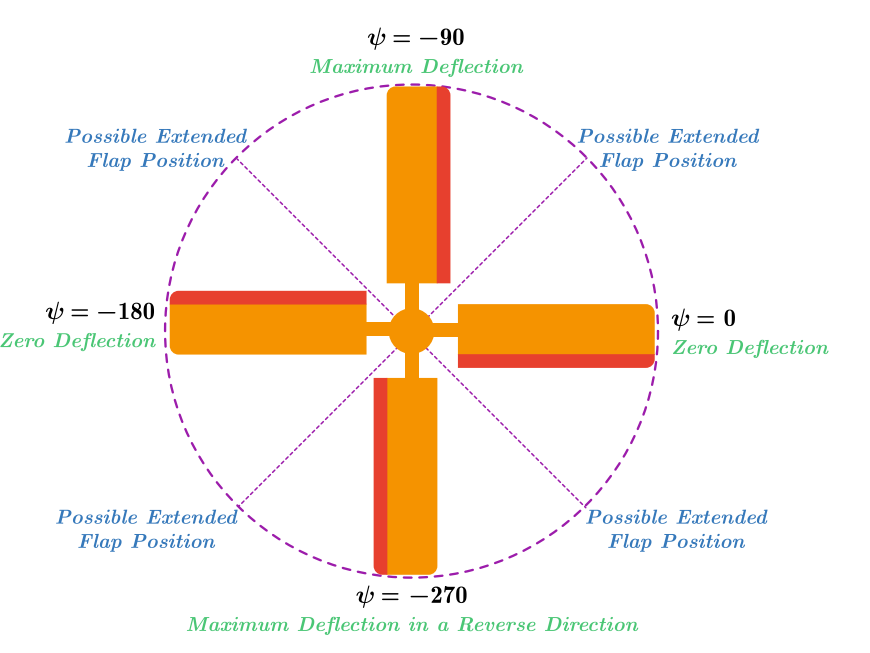
过渡运动中一个周期内的襟翼偏转
由上可得出,在水平面上产生纯加速度需要襟翼偏转的频率等于单翼的偏航角速度。为了更好地理解,襟翼按照公式18的定义应用于单翼,以两种不同的频率进行,下图显示了襟翼对单翼在本地水平坐标系中位置的影响,其中显示旋转引起的惯性效应不会显著改变单翼飞行器的位置。因此,公式18中的ω项设置为ψ˙。
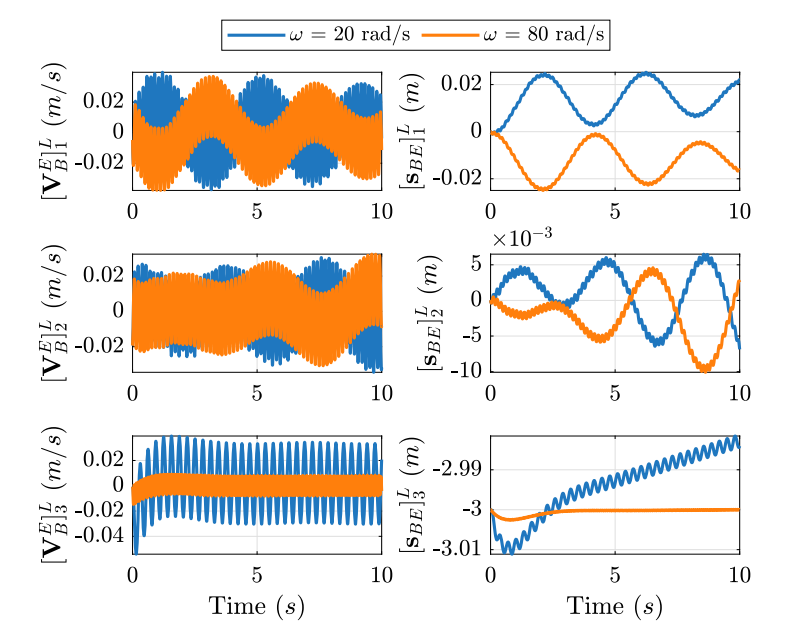
襟翼输入 =20rad/s &
=20rad/s &  =80rad/s
=80rad/s
值得注意的是,在上述正弦命令中考虑附加相位可以调整水平面上的运动方向。因此,襟翼输入最终可以构造如下:

公式19
在这里,δFtrim是襟翼的修整值,而δFz和AδF sin(ψ+ψ0)可以被视为襟翼的集体偏转和周期性偏转。通过这种方式定义襟翼偏转,控制目的有三个独立输入,即δFz,AδF和ψ0。
现在,可以使用前面识别出的模型来设计单翼飞行器的有效控制器。识别出的状态空间模型可以在不同条件下让人自由地塑造系统的不同方面。
▍简化动态模型,实现3D环境轨迹跟踪
然而,在控制设计过程中,研究人员发现简单的动态模型更有用,因此,研究人员对已识别模型进行简化,并尝试使用闭环系统中的反馈环路来补偿系统动力学的复杂性。
例如,在确定等效的降阶传递函数之后,从襟翼输入到az的传递函数以评估近似性能,下图演示了主要和近似传递函数对双边双重信号的响应。如图所示,除了高频振荡外,近似传递函数可以令人满意地跟随主要传递函数的一般行为。
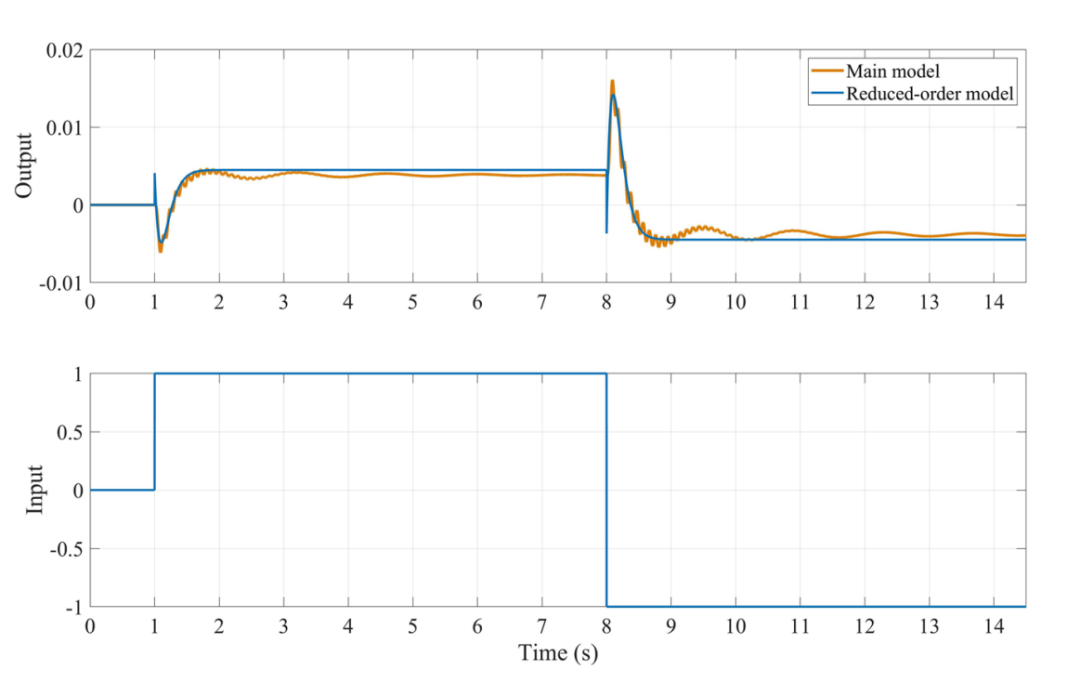
az的主要和近似传递函数对双边双重输入的响应
研究人员也将类似的方法用在了移动方向调整(ψ0)、水平面运动速度调整( )等方面。通过对两个子系统进行状态空间模型的识别,研究人员发现所有系统状态的信息都可用,线性二次调节器(LQR)控制策略可以作为控制设计过程的合适选择。在系统固有的姿态稳定性和相对宽松的实际应用中,PID控制器也将成为一个可接受的控制系统替代方案。同时研究人员也提出一种通过调整单个输入来控制所有三个速度分量的新型设计,其所设计的速度控制器的示意图如下图所示。
)等方面。通过对两个子系统进行状态空间模型的识别,研究人员发现所有系统状态的信息都可用,线性二次调节器(LQR)控制策略可以作为控制设计过程的合适选择。在系统固有的姿态稳定性和相对宽松的实际应用中,PID控制器也将成为一个可接受的控制系统替代方案。同时研究人员也提出一种通过调整单个输入来控制所有三个速度分量的新型设计,其所设计的速度控制器的示意图如下图所示。
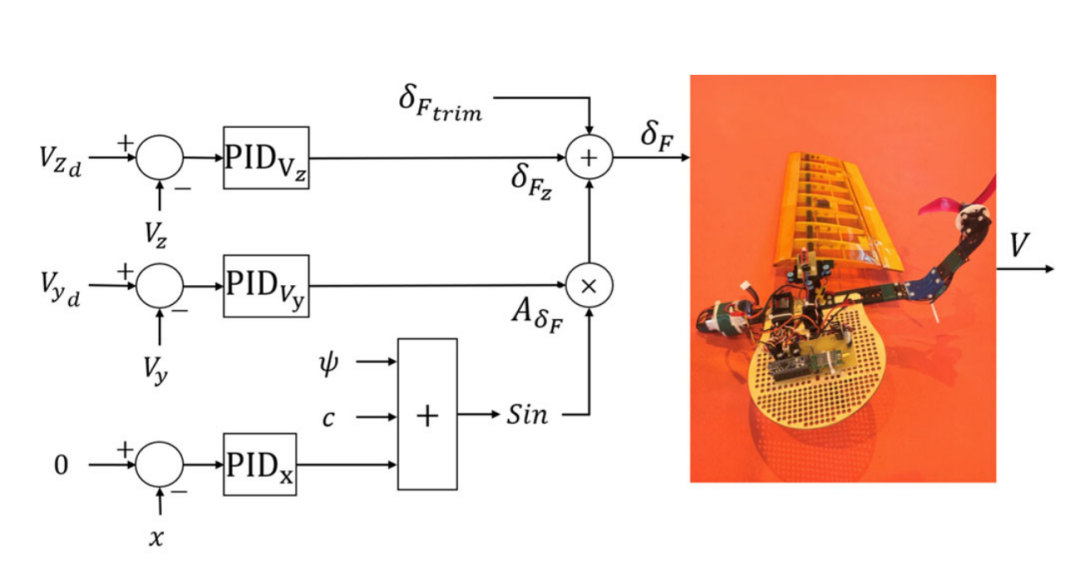
速度控制系统的示意图
传统PID控制器用于控制垂直速度。第二个PID控制器被用来调整施加在襟翼上的正弦命令的幅度以控制Vy,第三个PID控制器通过调整正弦信号的相位来防止飞行器沿x轴移动。其控制器参数如下表所示。
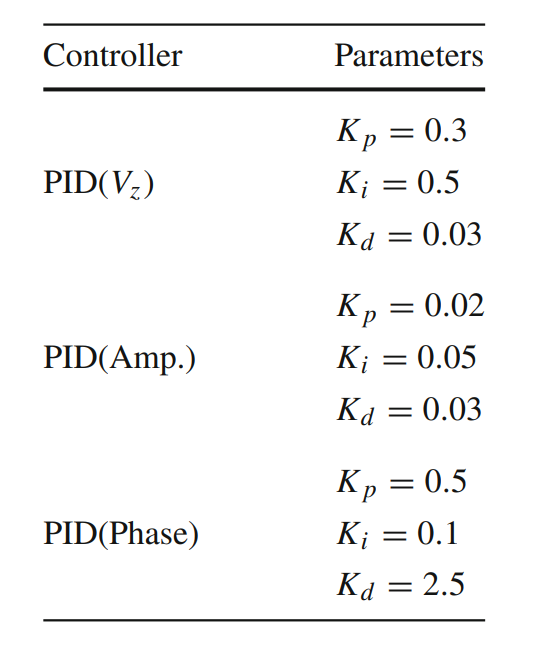
控制器参数的数值
通过将设计的控制器应用于单翼空中机器人的详细非线性模型,研究人员也对飞行器闭环性能进行了评估,其闭环响应如下图所示。
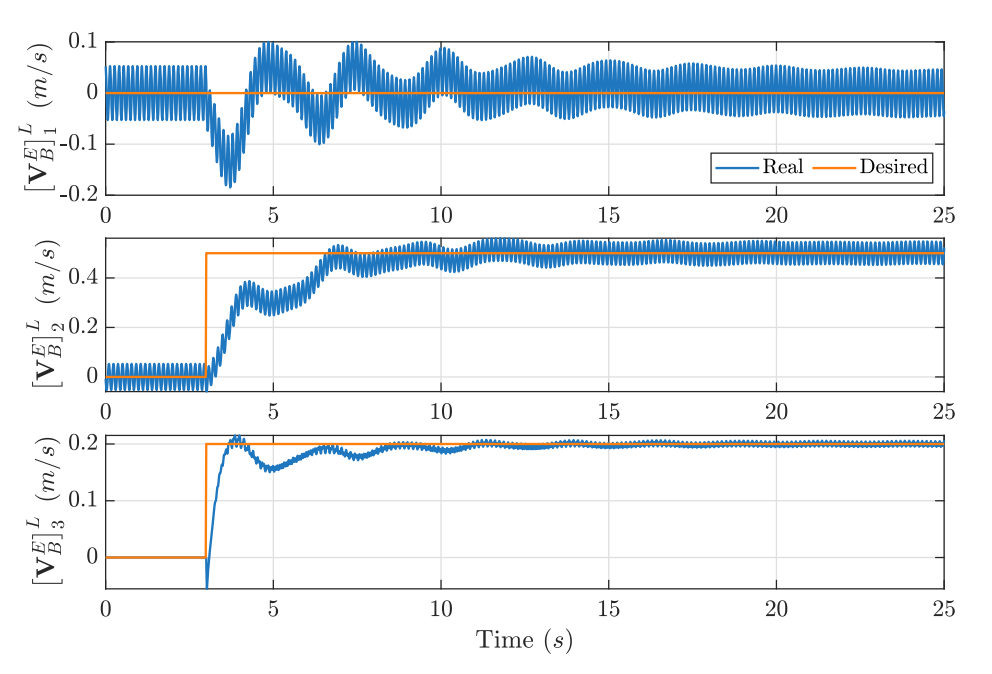
闭环响应(速度控制)
5秒钟内便可达到所需速度的快速响应和高达可达4 m/s的单翼速度为使用单个襟翼控制复杂的时间周期性空中飞行器在3D环境中的速度提供了必要条件。
值得一提的是,该飞行器同时受益于襟翼和电机控制。但在飞行过程中,电机速度被设置为恒定值,控制器仅根据单翼瞬时跟踪误差调整襟翼输入。为了设计位置控制系统,研究人员通过外部控制环增加控制器,以便根据位置误差确定内部环所使用的期望速度。其整个闭环系统最终如下图所示。
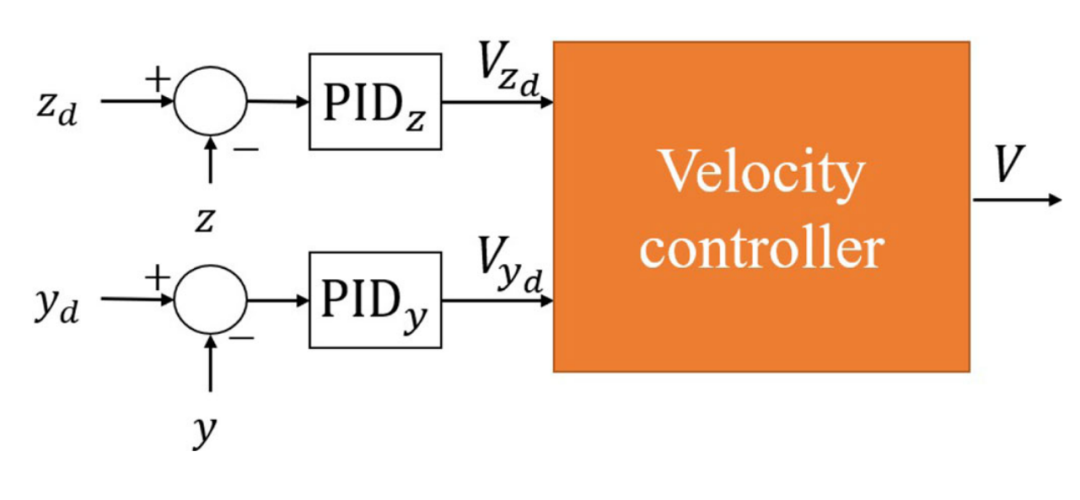
整个闭环系统的示意图
为了更好地评估闭环系统的性能,研究人员还在模拟中考虑外部干扰的情况下,将以下外部干扰添加到作用于单翼上的总力中:
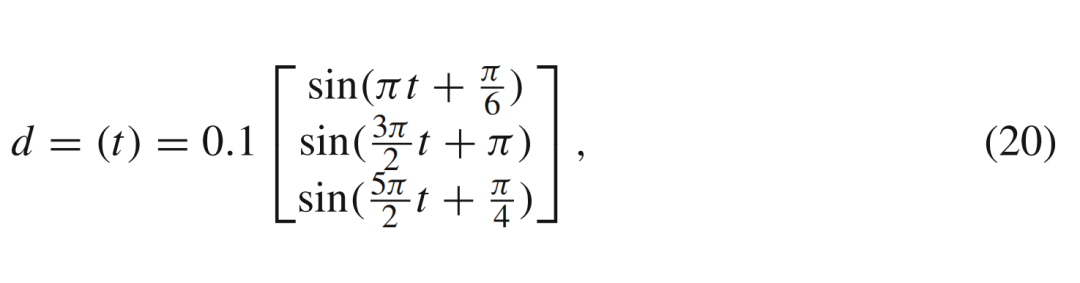
公式20
同时,研究人员也使用文献中常用的正弦函数模拟不同类型的大气干扰。
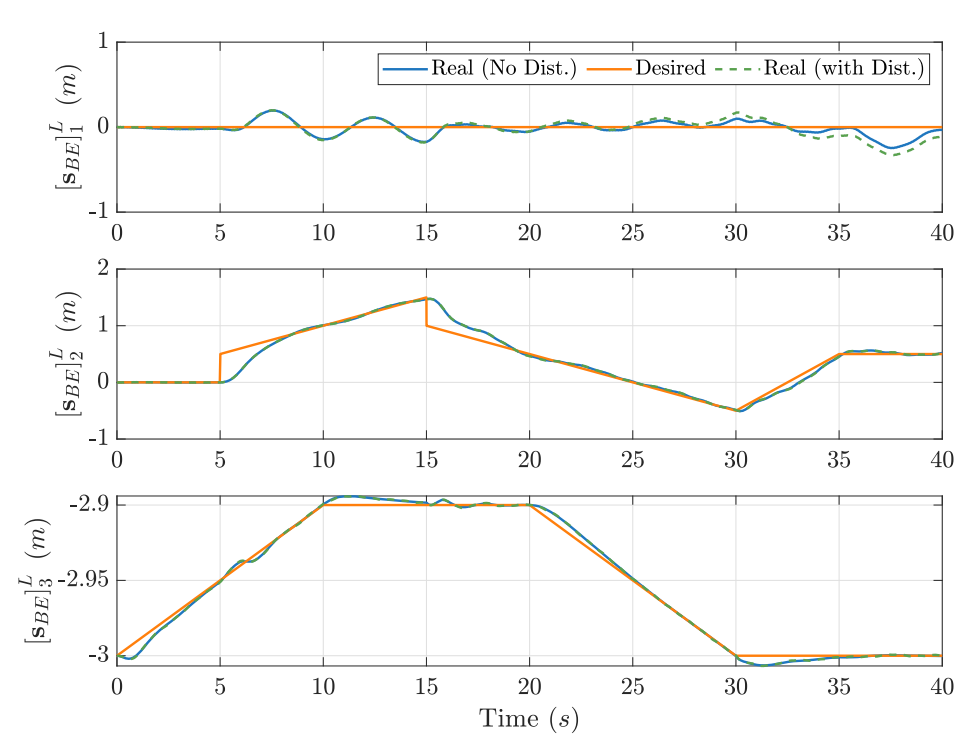
存在和不存在外部干扰的闭环响应
实验数据证明,即使考虑到显著的外部干扰,单翼飞行器的控制在两种条件下的平均绝对跟踪误差(MAE)也是令人满意的。
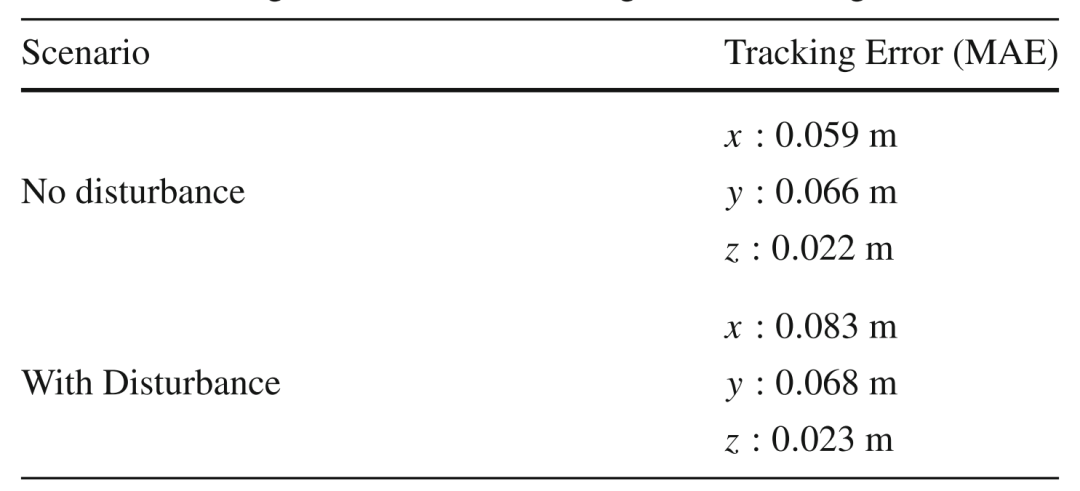
单翼在不同飞行条件下的跟踪误差
研究人员为了构建非周期性命令,基于垂直方向上的跟踪误差,使用多环PID控制系统。另一方面,根据所需的水平速度计算周期性命令的幅度,而命令的相位调整水平平面上的移动方向。仿真结果表明,研究人员所提出的方法只要控制器修改襟翼输入,便可实现单翼飞行器在约5秒钟内到达期望位置的附近,并能够在存在外部干扰的情况下在3D环境中的提供轨迹跟踪。仿真结果表明,就能够在存在外部干扰的情况下在3D环境中提供轨迹跟踪。
-----------------END-------------------


更多精彩
*自研4D激光雷达L1 + GPT大语言模型 宇树Unitree Go2四足机器人有啥黑科技?
*青少年福音!全球机器人科技启蒙齐聚世界机器人大会博览会,速线上报名错过等一年
*仅3人团队自费40万,打造史上最快拳击机器人!最低延迟12毫秒
*多领域国产替代,引领光伏、3C电子未来发展,这家企业做到国产前三的秘诀来了
*老外把CRT电视+Echo音箱暴力拆解 利用Will Cogley硬件平台成功打造出“大眼萌瓦力”机器人
*让焊接跟手机一样简单易用,大族机器人自动化焊接工作站(气保焊)全新升级
*等你来报名!6大主题论坛,数百位国内外专家学者,4.5万㎡展览面积,2023世界机器人大会售票通道已开启!
*上半年国产机器人市场份额达43.7%,埃斯顿、汇川、埃夫特销量领先
*提升围棋水平找对陪练是关键 为教培产业赋能 传承围棋文化 小明围棋机器人来了
*Everyday Robots关停后,谷歌用机器人做了一件大事
*50万美元打造一个会流汗会呼吸的机器人,网友:到底有啥用?
*谁说导盲机器人不如狗?!IEEE顶刊发表 基于空间风险图的势场法让导盲机器人变得更聪明
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募, 关注机器人大讲堂公众号,发送“ 交流群 ”获取入群方式!
招募作者
机器人大讲堂正在招募【兼职内容创作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可将简历和原创作品投至邮箱: LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎朋友们的加入!

看累了吗?戳一下“在看”支持我们吧



