
近日达特茅斯大学的研究人员正在研究一种软模块来搭建柔性机器人实验,这些软模块看上去更像是积木,能够承重、滚动、行走、抓握物体和运输负载的结构。
这些类似于积木块的软模块可以自由变动,呈现出最适合执行任务的形状。例如,这种机器人在紧急情况下的快速反应中可能非常实用,比如由无人机或直升机投放的大型机器人可以组装成临时的保护性帐篷用于救援。
有一种蚂蚁会在它们的路径上相互合作搭建桥梁来跨越缝隙,或者在需要的时候组成防水木筏,瓜里尼研究生和高级研究学院博士候选人赵路阳表示:“我们开始设计机器人积木,它们可以像蚂蚁一样,以不同的方式联合起来,执行不同的功能。”
StarBlocks是由赵路阳博士和达特茅斯现实与机器人实验室、罗格斯大学和耶鲁大学的合作者共同制作的桌面原型,并且通过该原型,展示了这一想法及其成为动态工具箱的潜力。
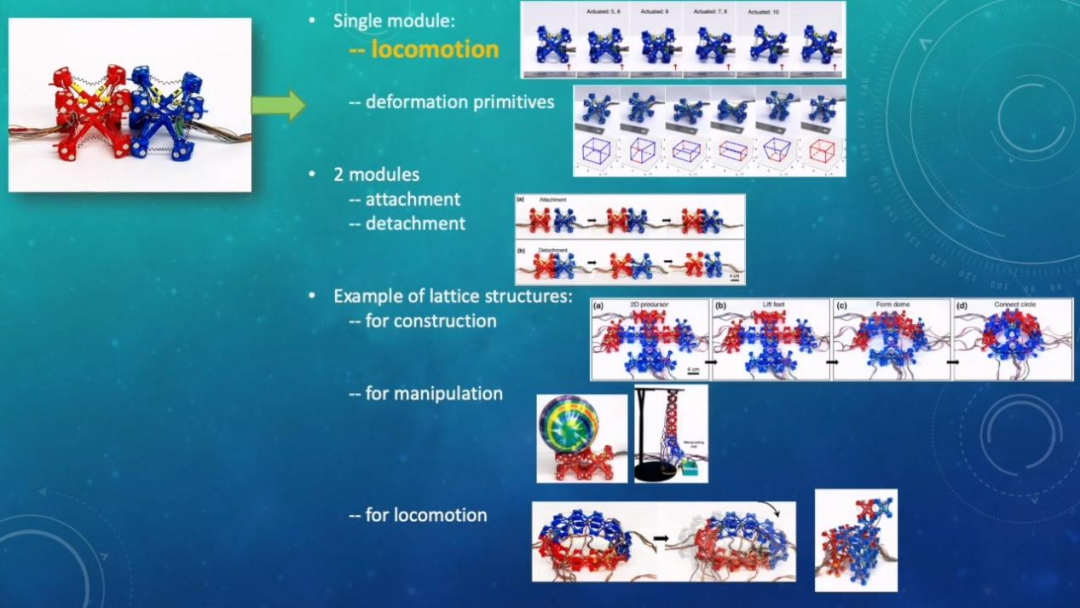
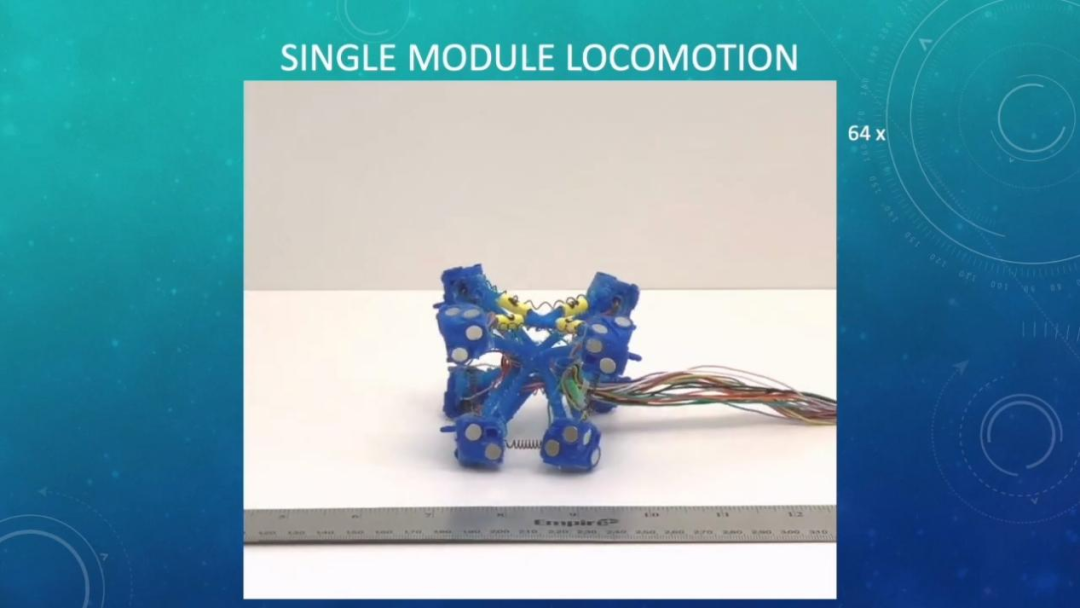
每个块或模块都有一个星形骨架。模块的核心由一种结合了塑料和橡胶特性的材料通过三维打印技术制成,既轻便又有弹性。
机械肌肉方面由合金制成的弹簧组成,在在电加热时会变形进而重塑骨骼,使模块能够模拟运动、弯曲和改变大小。这些模块通过安装在固定四角的磁铁相互连接。
此外研究人员展示了这些模块可以制造的各种结构:如圆顶帐篷形式的承重结构、滚动轮形态结构、仿四足动物的承重结构,以及一个可以抓取和移动小物体的机械臂,以及利用波浪式运动沿长度方向运送小球的线性链条。
研究人员还演示了积木沿表面的自组装。利用摄像头监测到的位置信息,计算机可以激活单个积木块,使它们向其他积木块移动并连接起来。
"这是第一个可以重新配置的模块化系统,一旦重新配置,就可以利用其灵活性来完成任务,"德文·巴尔科姆教授说,"这些任务包括运动和操纵,这也是很不寻常的"。
此外德文·巴尔科姆教授也表示,这些机器人结合了不同类型系统的优点。模块化使系统具有可拓展性和多功能性,并且便于维修,模块将软体机器人的灵活性与硬体模块的结构能力结合在一起。



