
电与光的碰撞会发生什么?
答案就是一个字:快!
有这样一款三维微执行器,可以同时被电压信号和光信号驱动,并产生上百赫兹的精确快速响应!
完全自由后,它立刻又能够化身为微型机器人,在激光的照射下产生高达3.66倍身长每秒的超快运动,同时还具有超强的适应性和鲁棒性。
而这样的一个微型机器人,尺寸甚至不到一个毫米,甚至比不上蚂蚁的一个脑袋。
这便是由西北工业大学罗建军教授团队开发的光电双驱三维微执行器以及光驱超快运动的微型机器人。
该项研究以“Multiresponsive Microactuator for Ultrafast Submillimeter Robots”为题,近日发表在《ACS Nano》期刊中
论文链接:https://doi.org/10.1021/acsnano.2c12203
目前,亚毫米尺度上的微型机器人受限于驱动器响应速度、摩擦力调控及一体化成型等难题,其运动速度难以超过一倍身长每秒(1BL/s),而且需要特制的棘齿表面才能获得运动所需的各向异性摩擦力。
为解决上述问题,该研究团队进行了多项关键技术突破。
▍电光火石,极速响应-光电双驱精准快速的三维微执行器
该团队所设计的微执行器和微型机器人由多层图案化、高精度的纳米薄膜构成,所形成的双晶片薄膜结构,能够对温度变化产生敏感响应从而产生弯曲变形。
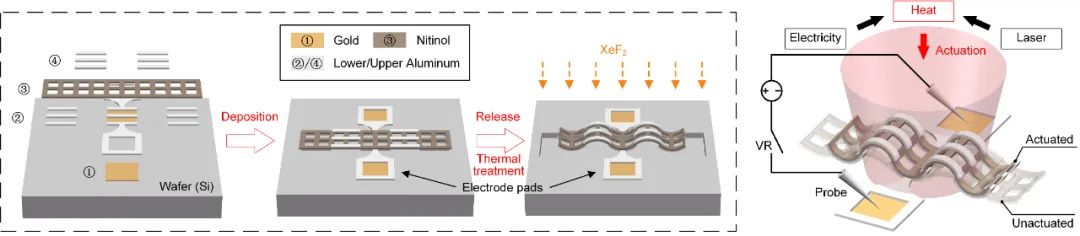
微执行器中的铝膜是良好的导体,能够通过在驱动电极上施加低压信号产生焦耳热。表面的氧化层薄膜又能有效吸收激光,利用光热效应产生快速响应。而且,微执行器形变量随着电压以及激光功率的变化线性变化,响应十分精准。
得益于高质量纳米薄膜的高表面积体积比,这种结构散热极快,无论是对电还是光,响应速度都能达到上百赫兹!


▍断臂求生,奔向自由-超快速光驱微型机器人
驱动电极一方面为微执行器提供电驱动触点,另一方面也限制了其只能进行原位驱动,那么断开驱动电极是否可行?
研究团队受自然界中尺蠖的运动方式启发。主动断开两侧的驱动电极后,微执行器瞬间变身成为了可自由运动的微型机器人,能够继续将对光的快速响应转化为与基底间的摩擦力从而快速尺蠖式爬行运动。

所采用的设计方法和制造技术泛化能力极强,能够仅仅通过修改每层薄膜的平面轮廓,产生多种多样的三维构型变化。
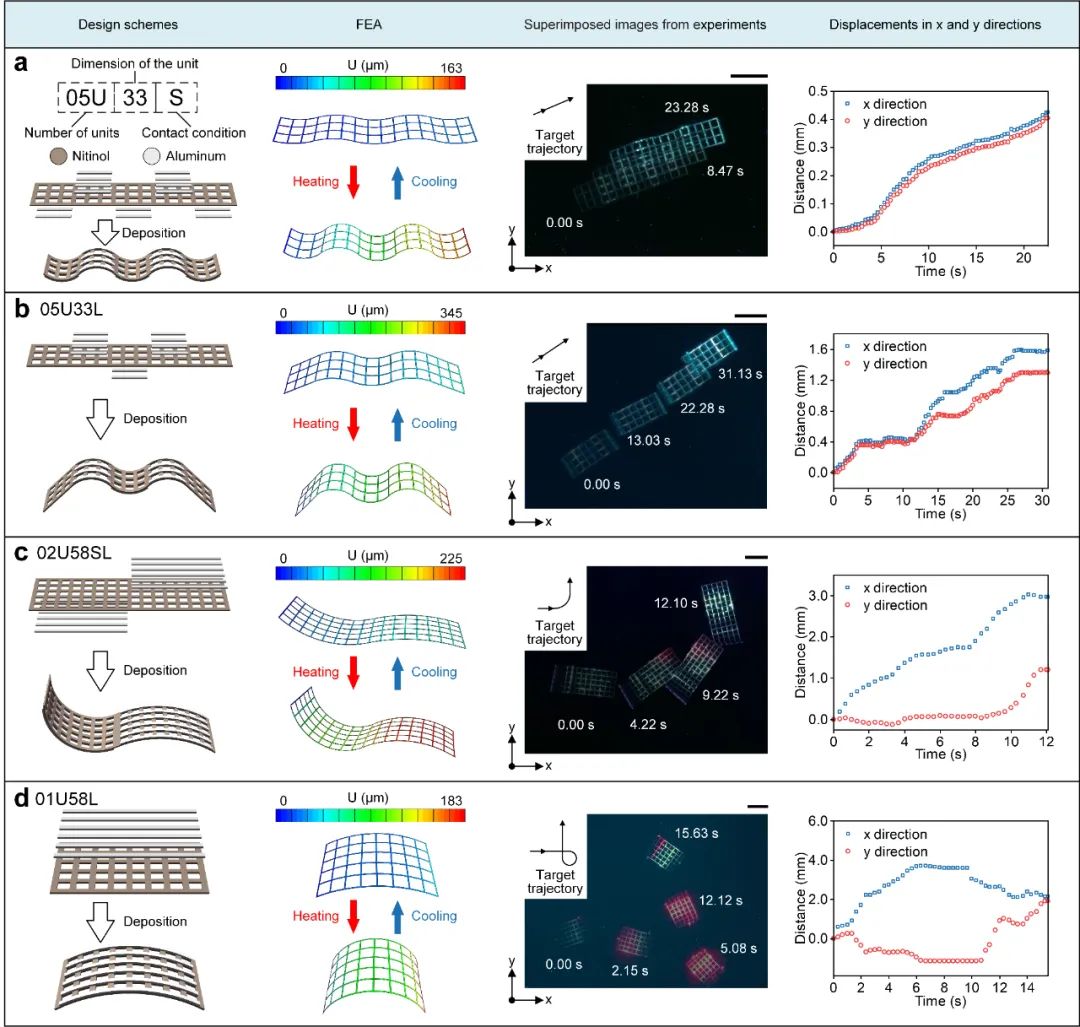
微型机器人的运动速度可以通过照射激光的频率直接控制。以微型机器人02U58SL为例,在硅片抛光面上,随着激光频率的上升,机器人运动速度呈现先增大后减小的趋势,并在30Hz时达到最大。抬起硅片一侧,微型机器人的爬坡能力也被验证。
转向运动同样可以根据激光在机器人上的照射位置直接控制,激光照射位置的偏置能够产生不平衡的结构形变,从而产生转向力矩。
通过构型泛化,所得到的微型机器人具有各种不同的运动特性。微型机器人01U58L由于具有更小的质量和尺寸,能够对高达100Hz的激光频率产生响应,运动速度达到惊人的3.66倍身长每秒,转向速度最快更是达到了167.3°/s。
▍双手插兜,无惧对手-超强适应性及鲁棒性
微型机器人通过构型设计,前后足能够自动与基底间产生各向异性的摩擦力,不同于其他微型机器人,完全无需棘齿表面即可产生运动。研究人员还测试了微型机器人在硅片抛光面、未抛光面以及光栅等不同粗糙度的基底上的运动能力,结果表明微型机器人对不同表面具有很强的运动适应性。
不仅如此,微型机器人还具有超强的鲁棒性。微型机器人的薄膜结构特征和对称性3D结构设计使其对于复杂环境中的风险和意外情况表现出了优良的故障安全和容错行为。
它能够在重量是其上万倍的探针挤压后恢复形状并继续运动;在多次自由落体试验中,能以85%以上的概率以正常状态落地。但即使结构被完全翻转,机器人还能够在结构翻转的状态下以接近正常状态的速度运动。

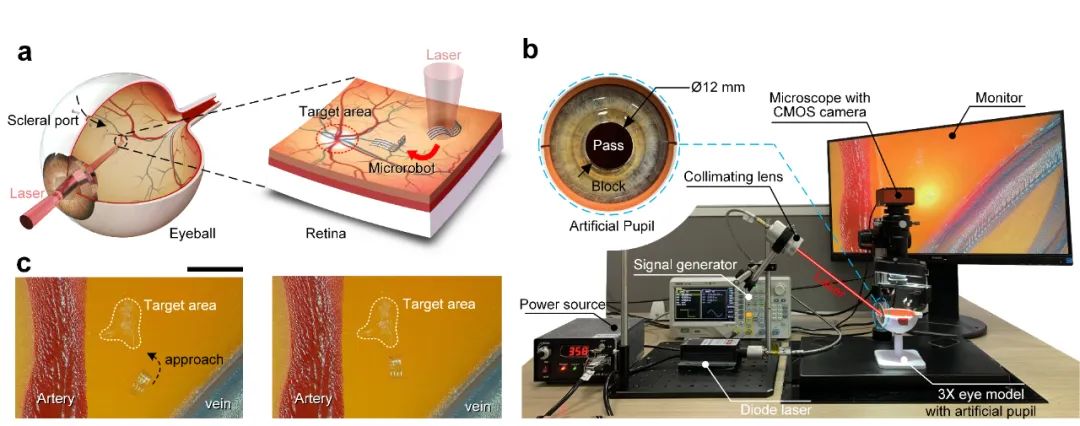
研究人员为这种光驱动的微型机器人构建了一个眼科手术的概念系统,并在3倍人眼模型中初步演示了微型机器人在受限驱动条件下的被动障碍跨越机制和驱动运动。
所谓被动障碍跨越机制正是由于其极强的鲁棒性,通过被动的扰动能使其迅速飞跃障碍,而落地姿态并不影响其后续的运动。

▍并行化、批量化高精度制造
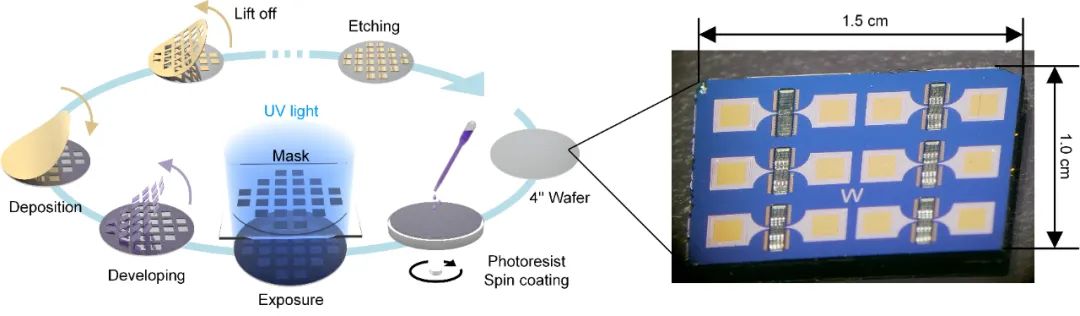
更加神奇的是,这种微执行器和微型机器人的结构特征完全符合微机电系统(Micro electro mechanical system)MEMS制造要求,能够在一张4寸硅片上同时并行化、批量化制造出成百上千个样机!
试想未来通过这种技术发展出的微型机器人大军,压迫满瞬间拉满!
该研究为微观尺度下研制可精确控制、快速响应的高精度三维微执行器,以及可高速可控运动、具有强适应性和强鲁棒性的微型机器人提供了新思路、新方法和新技术。
研究人员打算在后期继续探索这种微型机器人在液体中的运动能力,致力于将其发展为一种可跨介质的微型机器人,从而具有更加广泛的应用前景。



