
让大鼠在跑步机上行走,这是要作甚?

受环境因素的影响,如低光环境,动物在行走时可能无法视觉观测到地形的变化,这使得它们需要调整自己的动作来适应不可预测的地形。

随着神经科学的发展,越来越多的研究表明大脑皮层在动物对意外干扰的反应中起着重要作用,但科学家对这一过程中皮层区域之间的功能网络知之甚少。
▍北理工大鼠实验
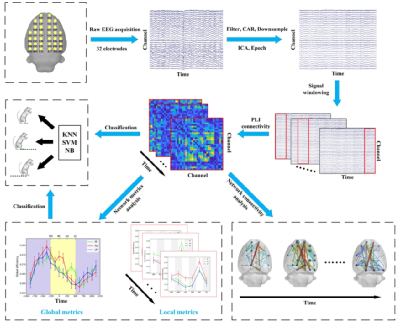
为了研究这个问题,北京理工大学的研发团队训练了六只视力受阻的大鼠在跑步机上行走(跑步机上有一个随机的不平坦区域),研究人员记录了大鼠的全脑脑电图信号,并使用相位滞后指数量化每个窗口内的功能连通性。
最后,利用机器学习算法验证了动态网络分析检测大鼠运动状态的可能性。该项研究以论文(Time-varying functional connectivity of rat brain during bipedal walking on unexpected terrain)为题发表于中国科技期刊卓越行动计划高起点新刊Cyborg and Bionic Systems上。

论文地址:https://doi.org/10.34133/cbsystems.0017
▍功能连通性的时变分析
在此之前,已经有一些实验表明,人类和其他动物在遭遇复杂地形或者意外干扰后,与运动相关的皮层会变得更加活跃。然而,这些研究主要集中在分析大脑各个区域的活动,而没有分析大脑区域之间的相互作用。
行为和认知通过皮层区域的相互作用而产生。大脑连接旨在描述皮层之间的相互作用,包括结构连接、功能连接和有效连接。目前,基于网络的研究大多使用整个扫描会话的数据来构建静态的脑功能网络,可以获得整个过程的大脑连通性特征。然而,行走是一个由站立和摆动相组成的循环过程,大脑皮层的活动与步态相耦合。
因此,静态功能网络可能无法捕捉大脑连通性随步态阶段的变化。考虑到行走过程的连续性,在时间尺度上分析网络属性可能更有助于理解行走过程中皮层信息交互过程。
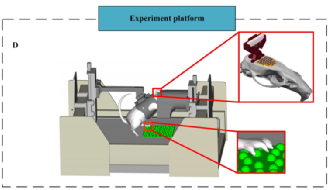
于是,研究团队以大鼠为模型,构建了一个基于跑步机的姿势约束平台。
实验选用6只雄性大鼠(8-10周龄,体重200-250 g),在一周的饮食控制后,大鼠被训练成双足行走。经过两周的训练后,研究人员将自制的32通道柔性电极阵列通过手术固定在大鼠的颅骨表面。
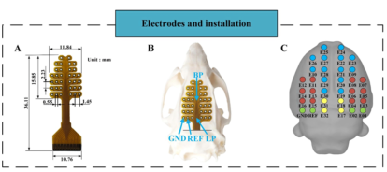
在悬挂装置的帮助下,大鼠以两足姿势在跑步机上行走(6.5厘米/秒- 7.5厘米/秒),并被一根黑色管子挡住视线,从而使大鼠无法通过视觉获得地形信息。
研发人员在跑步机皮带上随机放置了一块可移动的不平整区域,跑步机的两侧各放置了一个80帧的摄像机来记录老鼠的行为数据。
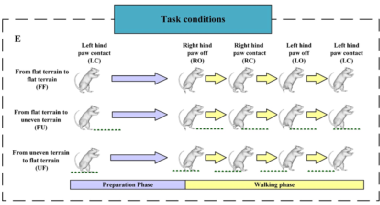
实验中老鼠们进行了三种类型的运动任务:(1)从平坦地形走到平坦地形;(2)从平坦地形步走到不平坦地形;(3)从不平坦的地形走到平坦地形。
此外,团队根据老鼠的步态定义了四个事件:右后爪离地(RO)、右后爪接触地面(RC)、左后爪离地(LO)和左后爪接触地面(LC)。
此外,团队基于PLI计算了功能网络的全局和局部指标。最后,团队利用向量机(SVM)、朴素贝叶斯(NB)分类器和k -近邻(KNN)分类器,基于PLI矩阵、全局指标和局部指标对大鼠运动状态进行分类。
研究人员假设大鼠脑的动态功能连通性随步态相位和地形条件的变化而变化。他们根据时变功能连通性的差异,可以检测出大鼠的运动状态。
▍实验结果
实验结果发现:相比行走阶段,准备阶段的功能连通性水平更高。皮层区域之间的信息相互作用随着步态阶段和地形条件的变化而变化。对后肢肌肉活动需求越高,则皮层越活跃。在可预测前方地形的情况下,功能连接水平较低。老鼠意外接触不平坦地形后,功能连通性爆发。
同时,利用步态多相位滞后指数作为特征,可以有效检测出大鼠行走过程中的运动状态。这些结果强调了基于EEG的动态功能网络分析在动物适应意外地形中的作用,该项研究可以帮助我们更好地理解大脑在动物适应意外地形过程中的作用,并有助于推进运动控制研究和神经假体的设计。
同时,本研究也存在一定的局限性。比如研究人员们没有考虑实验次数、实验顺序以及大鼠个体差异对于功能性连接的影响。并且仅分析了单一频段内的功能连接性,并未对多个频段进行分析。此外,该研究仅关注了不平坦地形随机出现所引起的地形变化对功能连通性的影响,并未分析其他类型的地形,这可能会阻碍研究结果的泛化。



