
在机器人灵巧操作领域,物体滑移控制是确保任务可靠性和稳定性的核心挑战之一。
传统方法主要依赖夹持力调节,但在夹持力已达极限或操作易碎物体时,其性能往往受限。
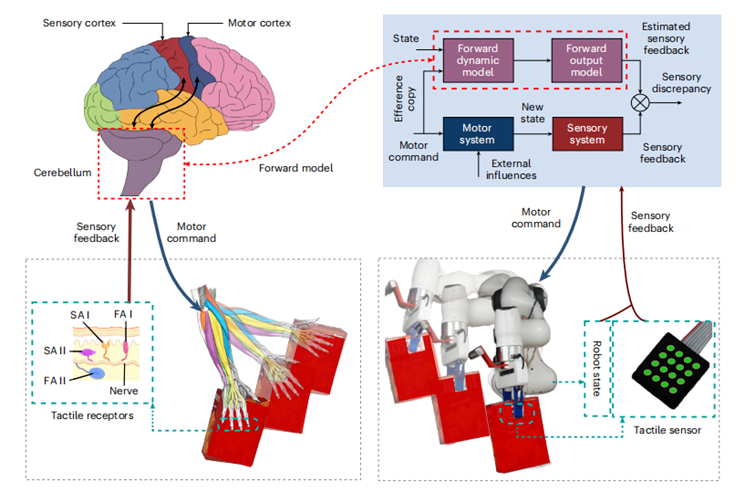
受人类手部运动策略的启发,提出了一种数据驱动的“Bioinspired Predictive Slip Control (BPSC)”框架,通过融合神经网络预测与模型预测控制(MPC),实现机器人轨迹调制的主动滑移抑制。
该框架创新性地引入动作条件触觉前向模型(ACTP)和六维球形坐标优化,使机器人能够通过非直观的轨迹调整(如加速度调制)提前规避滑移风险,在复杂搬运任务中显著提升稳定性和适应性。
实验表明,该方法在多种物体和运动轨迹下,滑移抑制效率较传统夹持力控制提升82%,为机器人操作在非结构化环境中的实际应用提供了新范式。



