
近日,美国南加州大学团队研发出集成热、惯性和力传感器的 MOTIF 机械手,有望突破现有机器人操作局限。
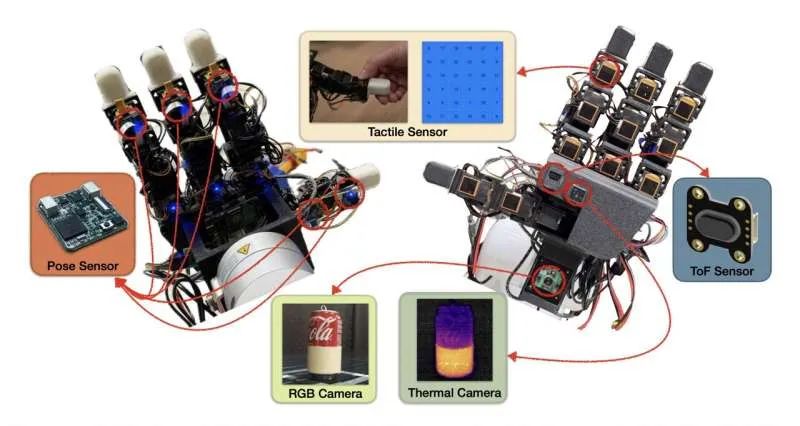
该机械手以人类手部为灵感,在 LEAP 手基础上扩展,整合触觉、深度、热成像、惯性测量(IMU)及视觉等多模态传感器。
现有机器人在高温环境操作、精细抓取等任务中表现欠佳,而 MOTIF 通过热传感实现高温物体安全抓取,结合惯性传感可精准识别同形异重物体。
实验室测试显示,其能避开物体高温区域,并通过指尖轻弹动作准确判断物体质量。
该成果已在 2025 年 ISER 会议展示。团队计划进一步集成高分辨率指尖传感器,优化算法,探索家庭、工业等场景应用,如厨房烹饪、焊接等需温度感知与力控的任务。
相关论文已发布于 arXiv 预印本平台。



