
在管道天地间翻腾自如,操控八大触角挑战物理极限,穿梭于黑暗中依然能"明察秋毫",这不是漫威宇宙中的超级英雄,而是北京交通大学轨道交通自治运行控制系统研究中心学生科研团队研发的管道巡检机器人——一款真实存在的"管道蜘蛛侠"。

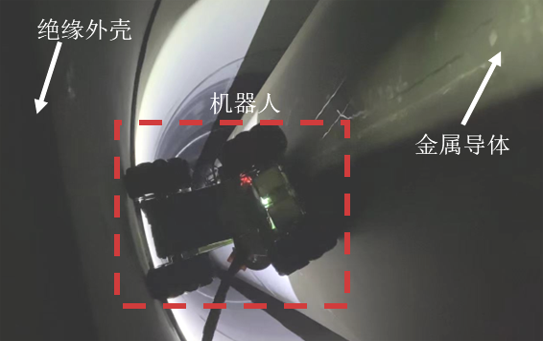
机器人主视角
机器人大讲堂了解到,这支团队凭借这款创新型巡检机器人,在中国国际大学生创新大赛(2024)中斩获全国银奖,相关技术也申请了多项知识产权保护。

▍攻克水电“卡脖子”难题,让管道“体检”不再停机数十天
"习近平总书记在给白鹤滩水电站的贺信中指出水电建设是“西电东送”的重要组成部分。"北交大交通运输学院博士生陈俊熙解释道,"而对于水电站输送电力的重要通路——离相封闭母线环形绝缘管道,即IPB管道的巡检,一直是困扰水利发电的卡脖子问题。"

白鹤滩水电站
这听起来像是一个小众技术领域,但背后隐藏着惊人的经济价值。水电站的IPB管道是电力传输的命脉,一旦出现问题,后果不堪设想。然而,传统巡检方式却异常低效——只能对管道逐节拆卸进行目视检查,导致每组发电机的巡检被迫停机至少20天,平均每座水电站每年因IPB管道检修的费用和经济损失高达上亿元。
为什么常规机器人无法解决这一问题?IPB管道的内部结构堪称极其复杂:嵌套管之间空间间距不断变化,管道内无法使用GPS定位,甚至连蓝牙信号传输都无法实现。这意味着机器人不仅要能适应变化的管道结构,还必须在完全黑暗且无信号的环境中精准导航。

管内环境
面对这一挑战,北交大团队基于学校在机器人领域的技术积累,首创柔性八轮结构与多姿态激光雷达定位控制算法,实现了复杂嵌套管道内壁无吸附螺旋运动及密闭黑暗环境精准定位控制。这一突破解决了水利巡检的场景化难题,为水电站的安全运行提供了新的技术手段。
▍八轮联动的“蜘蛛侠”:不翻车、不迷路的管道行者
传统管道机器人在实际运行中面临两大核心问题:一是稳定性差,容易在弯管、不规则管道处偏离姿态,甚至侧翻或卡死;二是定位导航困难,在封闭管道中容易迷失方向。
北交大团队的"管道蜘蛛侠"别出心裁地采用了柔性八轮结构设计。与传统机器人不同,这款机器人的八个轮子不是刚性固定的,而是具有柔性特质,能够根据管道内壁形状自动调整位置和压力。这意味着,无论管道环境多么复杂恶劣,无论管道形状多么奇特,它都能精准地抓握管道内壁。

柔性轮管道巡检机器人工作示意图
"在作业时,末端的八轮会互相提供足够的支撑力,实现紧密贴附于管道壁面,无论是水平方向,还是竖直方向,都能实现360°的全方位行走,以此保障运行的稳定性。"陈俊熙解释道。这种设计让机器人真正化身"蜘蛛侠",能够利用8只"触角"相互支撑,甚至实现倒挂金钩。
更智能的是,团队还实现了八轮差速控制,让轮子能够"思考"。当遇到障碍物或管道形状变化时,每个轮子都会自动调整速度和方向,确保整体运动平稳顺畅。这种控制策略使得机器人能够适应各种复杂环境,实现稳定可靠的巡检作业。
柔性轮管道巡检机器人工作中
至于"不迷路"的秘诀,团队给了它两个独门绝技。首先是一套独创的导航定位方法。针对环形贯通管道场景,团队在传统SLAM算法基础上首次提出利用柱坐标系快速建图定位,让机器人既能准确知道自己的位置,又能实时绘制周围环境地图。
其次是先进的视觉识别算法。机器人配备了可见光摄像头,能够对管道内异物遗洒情况、焊缝表面质量以及传感器状态等进行全面巡检。最令人印象深刻的是,即使只有1毫米宽的裂缝,也逃不过它的"火眼金睛"。
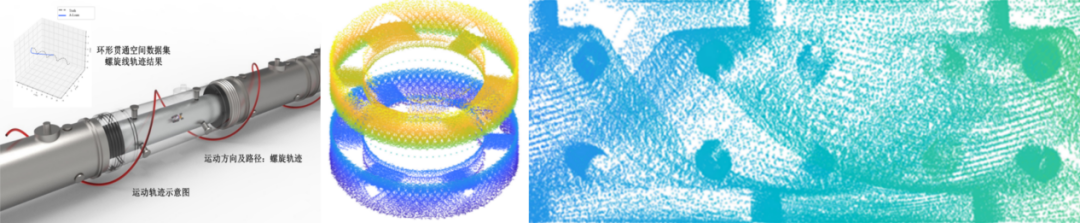
基于柱坐标变换的改进SLAM算法与建图结果
▍四代迭代铸就硬核技术,校企联动开启产业化之路
从构思到稳定成熟的产品,北交大团队的管道巡检机器人经历了四代迭代升级,每一代都凝聚着团队的智慧和汗水。
最初的两代机器人采用固定底座的八轮设计,效果并不理想。从第三代开始,团队大胆转向更加灵活的柔性轮自适应支撑设计思路,先是尝试六轮方案,最终确定了柔性八轮的设计方案。这一过程展现了科研创新的艰辛和团队不懈追求卓越的精神。

四代机器人驱动结构迭代
值得一提的是,团队在实验中设置的巡检场景难度远超同行标准。"这就像国家提倡攻克'卡脖子'问题和技术一样,先解决了更难的场景,积累了技术,再去应对其他简单的就易如反掌了。"陈俊熙解释道。这种挑战极限的精神,让团队的技术在行业中脱颖而出。
团队氛围同样值得称道。陈俊熙在带领团队过程中,鼓励成员畅所欲言、敢想敢干,从不忽视每一个人的想法,因为他坚信,每一个微小的主意都可能引起革命性的改变。正是在这样轻松活泼的氛围下,团队成员携手同行,攻克了一个又一个技术难关。

短短4年时间,在自动化与智能学院侯涛刚老师的专业指导和团队成员的共同努力下,这个项目不断迭代演进。如今,在北京交通大学就业与创业指导中心的支持下,陈俊熙已依托项目组建公司,并成功入驻北京交通大学国家大学科技园。学校将为团队提供包括创业空间、专家指导、资金帮助等全方位支持,助力技术转化为实际生产力。
据了解,巡检机器人系列产品已成功落地应用于国家能源、国家电网等重点单位,其应用场景广泛,包括雅砻江水电站、济南黄河大桥等实际项目,能够针对发电站内的IPB管道、电机组蜗壳、吸收塔,以及高速公路、高压电线等多样化场景提供服务。展望未来,随着技术的持续迭代与优化,巡检机器人在城市地下管廊的维护管理、工业厂房管道的检测评估等领域,同样具备广阔的发展前景。

未来研究团队将专注研究具身智能与低空经济的实际应用。团队看好产品交叉赛道,例如多货车结合多机器人/无人机的协作配送模式。在未来城市中,具身智能将成为这种创新配送方式的核心,既能满足日益增长的配送需求,又能显著降低固定中转站的建设成本,应用前景广阔。
从解决水电站IPB管道巡检的"卡脖子"难题,到潜在的各类管道应用场景,北交大团队的"管道蜘蛛侠"不仅彰显了中国高校科研团队的创新能力,也为国家重大工程安全运行提供了技术保障。相信随着技术的进一步完善和产业化推进,这款"硬核"机器人将在更广阔的领域大显身手,为国家经济发展和技术进步贡献更多力量。



