
在显微手术、细胞操作和微装配等领域,利用微型机器人,进行细胞注射、细胞特性分析、物体抓取等微小物体精细处理的微操作技术被广泛应用。但传统微操作机器人多为金属材质由电机或压电陶瓷驱动,虽精度高但体积大且难以小型化。折纸微操作机器人,利用层压技术,通过折叠可以将二维材料转化为复杂的三维结构,其精度、速度和灵活性优异,在微操作应用中具有独特优势。
然而,折纸机器人的柔性关节设计也带来刚度不足的问题,这不仅限制了额外传感器的安装,同时也带来了在接触操作中执行能力的下降。此外,多数折纸微操作机器人的支链数量不超过三个,其移动受限为三个自由度,这严重限制了其在复杂任务中的应用。虽然增加支链数量可提升并联微型机器人的刚度和移动性,但也会显著增加折纸结构的设计难度和折叠组装过程的复杂性。
▍研发微型并联机器人,实现亚细胞级操作
面对以上挑战,来自浙江大学曲绍兴教授团队的研究人员进行了深入研究,并成功研发出一款4自由度(4-DoF)、重量仅2.48g(不包括电机)的微型并联机器人Micro-X4。
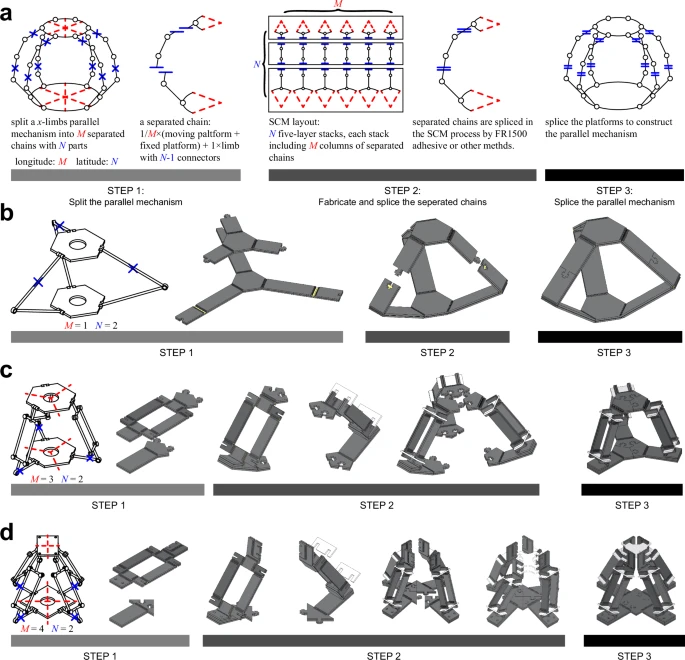
为了实现复杂折纸并联机构,研究团队提出了“拆分和拼接”策略。该策略通过将复杂的并联机构分解为多个简单的子结构,分别制造后再进行精确拼接,实现了复杂闭环并联机构的快速、高效制造。该方法不仅解决了复杂构型的微型化,还为其在各类微操作任务中的稳定执行奠定了坚实基础。此外,研究团队还证明了该方法在通过SCM方法制造各种类型的闭环并联机构中的通用性,为微型并联机器人的设计制造提供了新的思路。
在控制方面,研究团队充分考虑了折纸结构的独特特点,提出了与之相匹配的解析运动学解。这一解决方案不仅确保了Micro-X4在微操作过程中的高精度定位,还实现了对其运动轨迹的精确控制。通过这一创新控制策略,Micro-X4能够轻松应对各种复杂微操作任务,展现出极高的灵活性和稳定性。
与当前最先进的折纸微操作机器人相比,Micro-X4在性能上实现了全面超越。其756立方毫米大工作空间为微操作提供了更广阔的操作范围;346纳米高精度确保了操作过程中的细微控制;2738牛顿/米高刚度则保证了机器人在接触操作中的稳定性和可靠性。这些卓越性能使得Micro-X4能够满足从组织尺度到亚细胞尺度的各种微操作需求。
为了充分验证Micro-X4的实际应用效果,研究团队进行了一系列微操作实验。从图案切割到细胞定位和穿刺,再到细胞切割和插入,Micro-X4均展现出了出色的操作能力和精度。特别是在细胞操作和穿刺任务中,通过集成接触力测量技术,研究团队实现了对操作过程的精确控制,进一步证明了Micro-X4在微操作领域的巨大潜力。

目前,该研究成果的相关论文已以“Miniature origami robot for various biological micromanipulations”为题发表在Nature Communications上,论文的共同第一作者为浙江大学博士生冯博、博士刘一得(浙江大学博士毕业、现清华大学博士后)和博士生张佳航。论文的共同通讯作者为刘一得博士和曲绍兴教授,作者还包括浙江大学杨卫院士。
那么,Micro-X4具体是如何制作的呢?接下来和机器人大讲堂一起深入了解~
▍微型并联机器人结构揭秘,多自由度精密微操系统如何构建
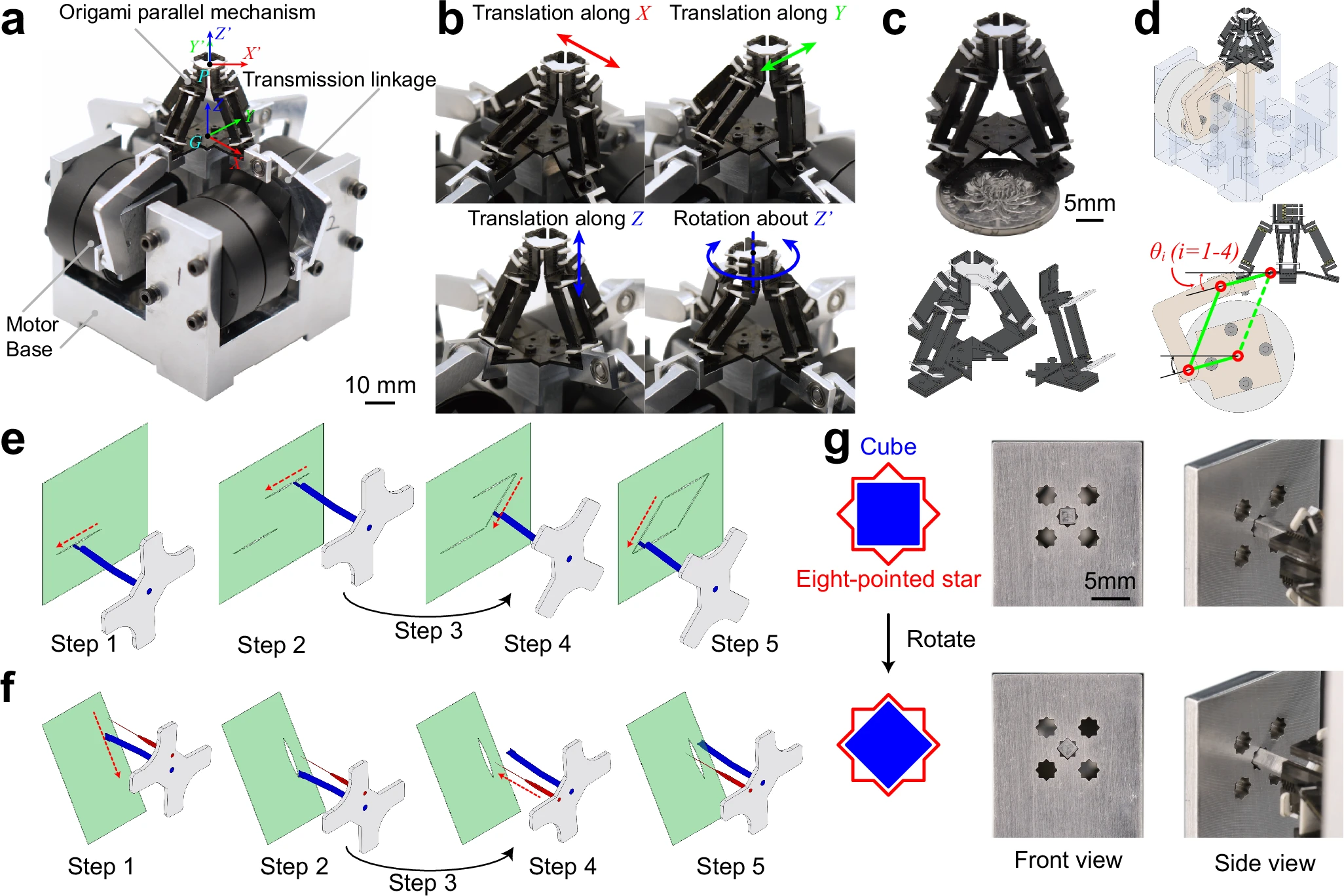
从结构与组成来看,Micro-X4微型并联机器人主要由一个具备四个支链的折纸并联机构、一个稳固的金属基座、四个驱动电机以及四组传动连杆构成。
其中,四个支链赋予了机械手四个自由度(4-DoF),包括沿X、Y、Z轴的平移自由度以及沿移动平台中央轴Z`的旋转自由度,为Micro-X4带来极高的灵活性与适应性。通过引入旋转自由度,Micro-X4在图案切割等任务中实现了对刀片方向的精准控制,能通过快速切换末端执行器来应对复杂多变的操作需求。
在折纸传动机构方面,Micro-X4采用了“拆分与拼接”制造策略,这一策略有效解决了包含闭环的微结构制造难题,通过分割并联机构、制造模块化支链、再拼接形成完整闭环并联机构的方式,该策略不仅提升了制造效率,还确保了机械手的整体精度与稳定性。
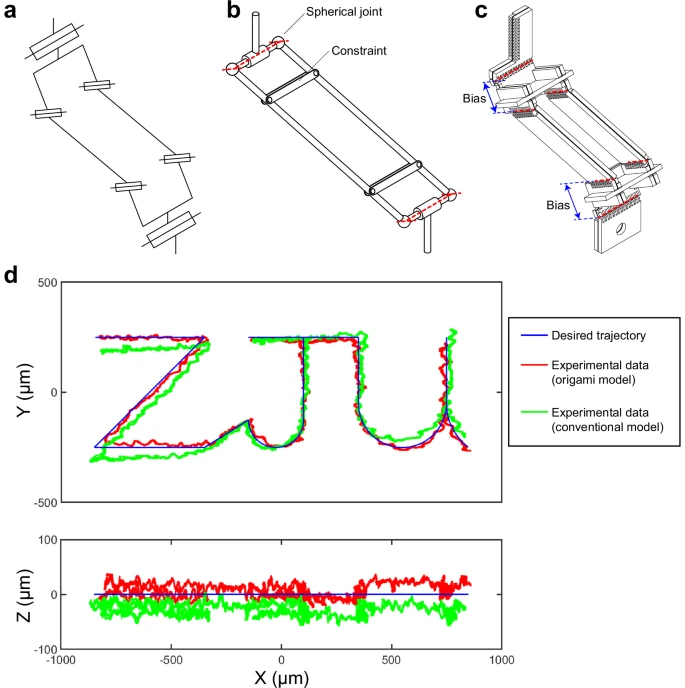
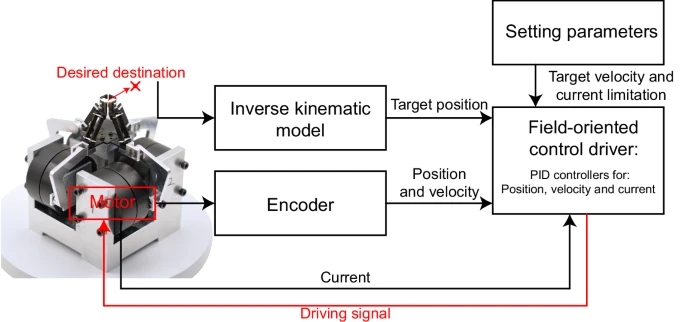
在运动控制方面,为了实现对Micro-X4的精确控制,研究团队构建了详细的运动学模型,该模型充分考虑了折纸结构中旋转关节与平行四边形连杆之间的偏差,并通过逆运动学模型的优化,进一步提高了微型并联机器人的执行准确性。这一模型的建立,为Micro-X4的精准操作奠定了坚实的理论基础。
在驱动与控制架构方面,Micro-X4则采用了四个配备编码器的电机驱动系统,并结合磁场定向控制驱动器,实现了对电机位置、速度和电流的精确控制。同时,三个PID控制器的引入,也进一步提升了系统的稳定性和响应速度,确保了Micro-X4在微操作任务中的高效执行与精准定位。
▍性能与应用测试,展示Micro-X4优势与应用效果
为全面评估Micro-X4微型并联机器人的性能优势,研究团队从多维度进行了详尽的实验测试,并与多种类型的微操作平台进行了对比分析。
多微操作平台性能比较
为了评估Micro-X4的性能优势,研究团队选择了三种类型的微操作平台进行比较。
在工作范围方面,Micro-X4展现出了广阔的操作空间。通过精确测量恒定方向工作空间和总方向工作空间,研究团队发现实验数据与理论模型高度吻合,这验证了其设计的合理性与准确性。具体而言,其恒定方向工作空间和总方向工作空间的体积分别达到756mm³和362mm³,为微操作任务提供了充足的空间。
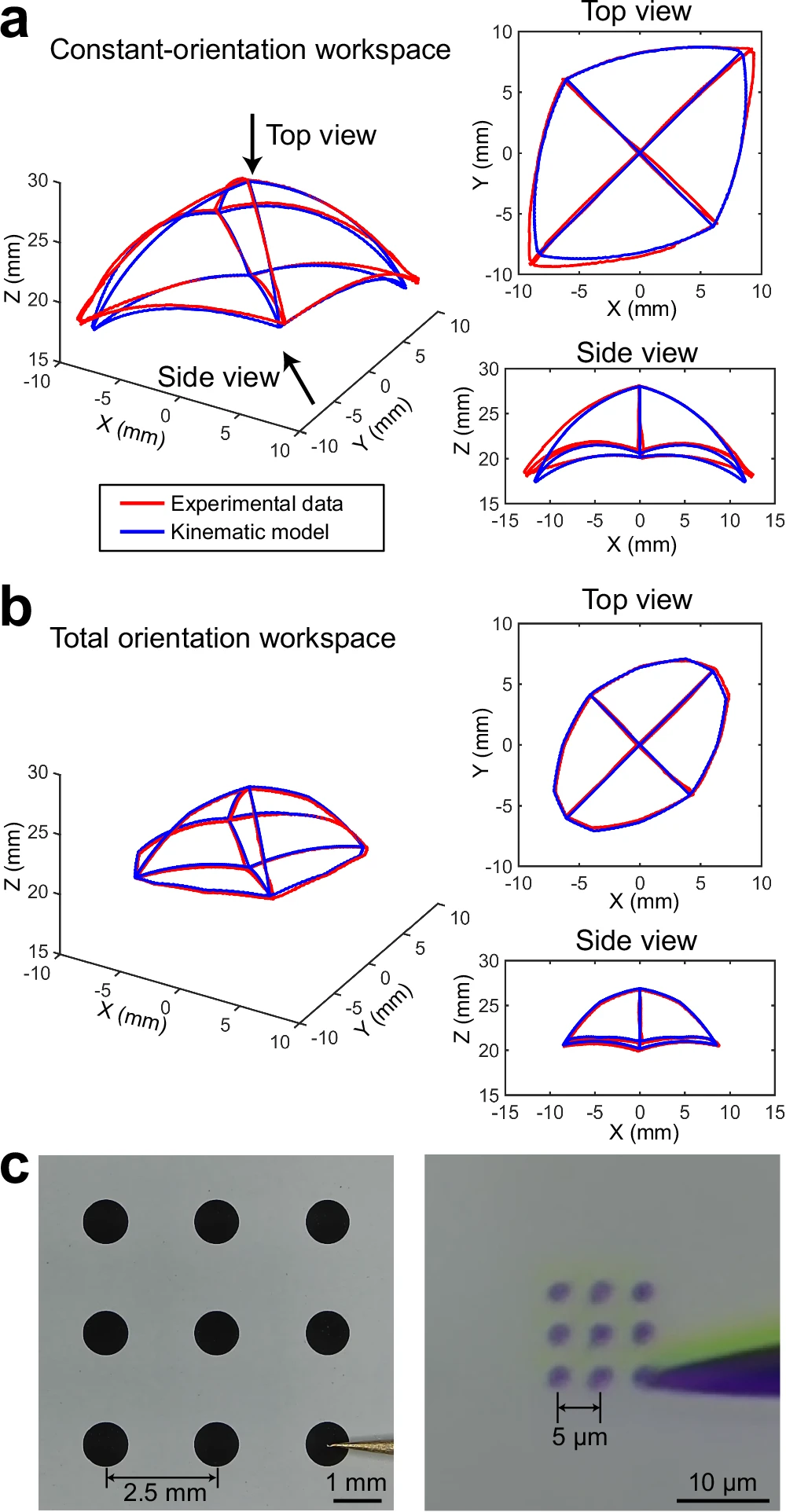
在精度方面,Micro-X4同样表现出色。通过定位重复性和方向重复性的精确测量,研究团队发现Micro-X4精度极高,整体定位重复性达到约346nm,方向重复性约为0.17mrad。通过实际演示(如指向不同尺度正方形的顶点和中点),研究团队进一步验证了Micro-X4的高精度优势。
在刚度方面,研究团队通过压缩刚度和扭转刚度的测量,展现了Micro-X4卓越的刚度特性。高刚度使得Micro-X4能够集成接触力测量功能,实现对细胞操作和穿刺的精确控制。
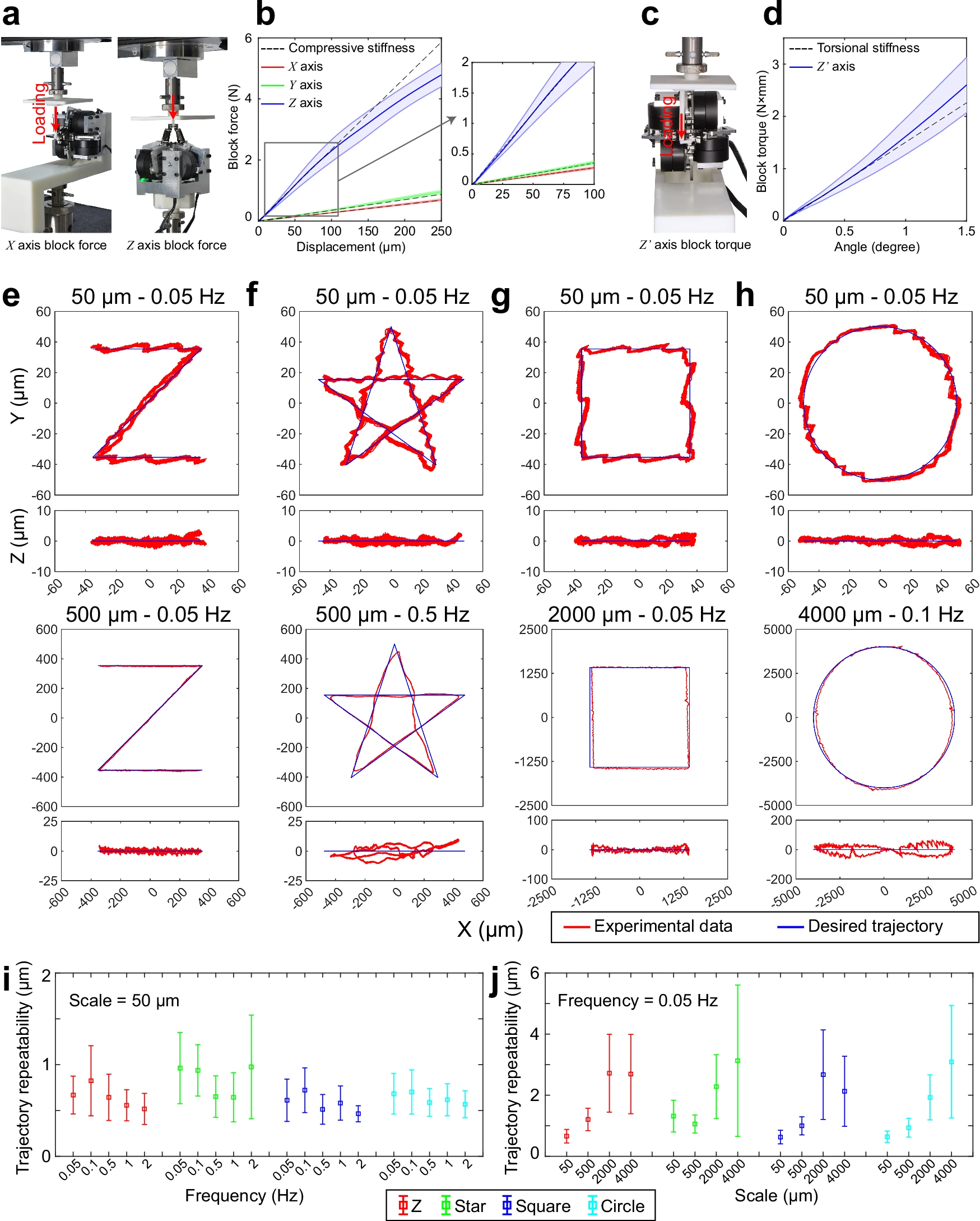
在轨迹执行方面,研究团队通过测试多种不同形状和尺度的轨迹发现,Micro-X4具备高精度的执行能力,其最大速度达到约124mm/s,且在不同尺度和频率下的轨迹重复性均保持在较高水平。
综合特征尺寸、相对工作空间比和精度等关键指标的分析,Micro-X4在工作空间和精度方面均性能卓越,特别是在所有特征尺寸≤30mm的平台中,其并联机构表现出最佳性能,进一步证明了其在微操作领域的领先地位。
实际应用效果测试
为验证Micro-X4的实际应用效果,研究团队进行了一系列从组织尺度到亚细胞尺度的微操作任务,深入展示了其在不同场景下的应用能力和灵活性。
图案切割:在显微外科手术中,组织切割的准确性和灵活性至关重要。实验中,一把精细的刀片被固定在移动平台的中间位置,通过精确控制Micro-X4的运动轨迹,研究团队成功在洋葱片上切割出了复杂的菱形图案。不仅如此,对于其他形状,研究团队还展示了将其分解为多个菱形元素,并逐一切割元素轮廓以适应形状的能力。具体实验中,Micro-X4成功执行了两个图案的切割任务:一个直径5㎜的圆形和边长5㎜的正方形,这充分证明了其在显微外科手术中切割不同尺度和形状图案的能力。
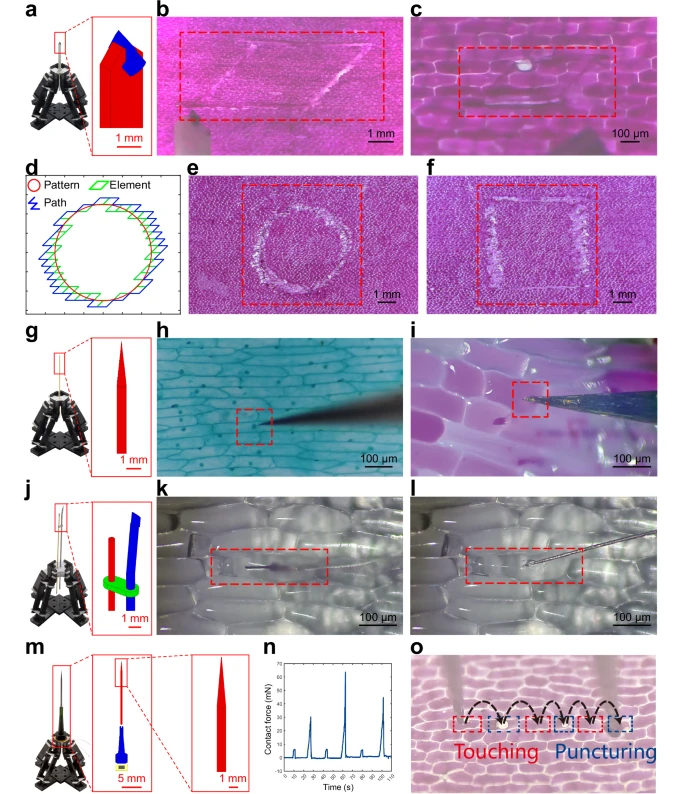
细胞定位和穿刺:细胞注射是细胞操作研究中的重要课题,而快速准确地定位注射目标是提高注射效率的关键因素。实验中,研究团队使用针头末端执行器,通过Micro-X4的精确控制,成功将针尖对准了染色洋葱片内选定的细胞核,并实现了对洋葱细胞的穿刺。这一过程不仅展示了Micro-X4在细胞定位方面的高精度,还验证了其作为高通量显微注射平台的潜力。
细胞切割和插入:细胞手术为理解基因和疾病的根本原理提供了一种重要策略,而不同的细胞手术通常需要使用不同的末端执行器来满足不同的任务需求。实验中,Micro-X4配备了刀片和针头两个末端执行器,通过旋转移动平台实现了末端执行器的快速切换。在模拟刚性细胞壁的显微注射过程中,Micro-X4首先使用刀片在卷心菜细胞上切开一条线以形成开口,然后迅速切换至针头末端执行器,沿着开口将针头伸入细胞内部。这一过程充分展示了Micro-X4在复杂细胞手术和亚细胞微操作任务中的应用能力。
细胞接触和穿刺:在微操作任务中,对接触力的精确控制至关重要。Micro-X4通过集成薄膜压力传感器,实现了对接触力的精确测量和控制。实验中,研究团队在Micro-X4的末端执行器和移动平台之间配备了薄膜压力传感器,并使其沿着一系列六个洋葱细胞交替执行“接触-穿刺-接触-穿刺-接触-穿刺”序列。通过测量接触力,研究团队成功实现了对针尖接触细胞时的精确控制,使其明显变形而不破坏细胞结构,并在需要时刺穿细胞。这一过程不仅展示了Micro-X4在接触力控制方面的优越性能,还进一步验证了其在微操作领域的应用价值。
以上深入的实际应用效果测试不仅展示了Micro-X4在微操作任务中的强大能力和灵活性,还通过集成接触力测量功能等创新设计,进一步提升了其在精确控制方面的优势。从图案切割到细胞定位和穿刺,再到细胞切割和插入,Micro-X4为微操作领域的发展带来了新的可能。
参考文章:
https://www.nature.com/articles/s41467-025-57815-5?utm_source=rct_congratemailt&utm_medium=email&utm_campaign=oa_20250317&utm_content=10.1038/s41467-025-57815-5



