
极速导读
随着科技的进步和人工智能的发展,人形机器人作为未来产业的重要赛道正逐渐走进人们的视野。近日,中国信息通信研究院泰尔系统实验室发布了《人形机器人产业发展研究报告(2024年)》,深入分析了人形机器人的现状、未来发展路径以及市场预测,并指出了这一领域正在形成的显著趋势。
▍内涵
1. 模仿人类外观和行为:人形机器人设计上模仿人类的外形和行为方式,具备较高智能化水平的机器人。
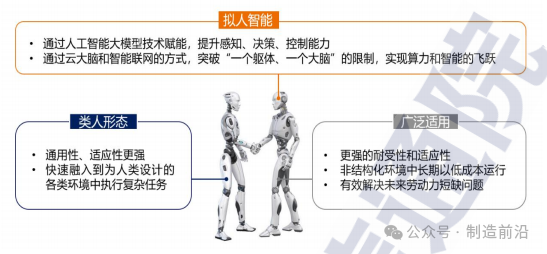
2. 类人特征:
- 拟人智能:人形机器人通过人工智能大模型技术的赋能,实现拟人化的感知、决策、控制能力。它们可以选择通过云“大脑”和智能联网的方式,突破单一躯体的限制,实现算力和智能的飞跃。
- 类人形态:人形机器人的高度模拟人类形态使其能快速融入为人类设计的各类环境中执行复杂任务,具有更强的通用性和适应性。
- 广泛适用:人形机器人具备比人类更强的耐受性和适应性,能在非结构化环境中长期以低成本运行,有效解决未来劳动力短缺问题,将在工业生产、民生服务、特种作业等领域广泛应用。
▍分类
按形态分类

1. 轮式人形机器人:
- 主要采用轮式驱动,强调触觉传感器和灵巧手的操作功能。
2. 半身足式人形机器人:
- 强调机器人的腿部运动能力,手部基本只用于平衡。
3. 全能型人形机器人:
- 具备双足、双臂、双手及各类感知和人工智能功能,适应开放环境中的多任务。
按功能分类
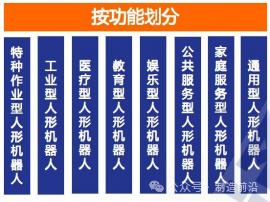
1. 特种作业型人形机器人:
- 用于执行巡逻巡检、灾害救援、危险作业等任务。
2. 工业型人形机器人:
- 用于工业生产及物流领域,如货物搬运、生产制造等。
3. 医疗型人形机器人:
- 协助医生进行手术、诊断、康复等任务。
4. 教育型人形机器人:
- 作为教学辅助工具,提供互动式学习内容。
5. 娱乐型人形机器人:
- 与人类互动,提供陪伴和娱乐功能。
6. 公共服务型人形机器人:
- 在酒店、餐厅、商场等场所提供公共服务。
7. 家庭服务型人形机器人:
- 用于家庭养老、育儿、家务等任务。
8. 通用型人形机器人:
- 可用于工业、服务、教育、医疗等多个领域。
▍发展历程
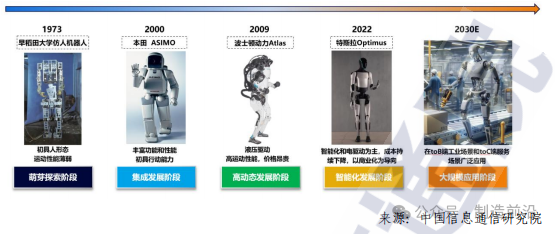
1. 萌芽探索阶段(20世纪60年代末至90年代):
- 以实现基本的双足行走功能为主要目标。
- 以日本早稻田大学为代表,开发了一系列机器人,如WAP、WL、WABIAN和WABOT等。
- 特点:基本实现双足行走功能和控制能力,初步具备拟人化结构,但整体运动能力较弱。
2. 集成发展阶段(本世纪初至2010年):
- 以感知和智能控制整合为主要特点。
- 本田公司的ASIMO系列人形机器人代表了这一阶段的重大进展。
- 特点:通过感知和智能控制技术的整合,机器人具备了初步的感知系统,能够感知周围环境基本信息,并根据感知输入做出简单判断并调整动作。
3. 高动态发展阶段(2010年至2022年):
- 控制理论和技术的进步提升了机器人的认知能力。
- 机器人能够独立、稳定地执行复杂动作,且此阶段人形机器人已经具备了较强的运动能力。
- 代表产品包括本田的升级版ASIMO机器人和波士顿动力的ATLAS机器人。
- 特点:具备精确完成抓取物体和倒液体等精细任务的能力,以及在具有挑战性的场景中保持平衡并实现高动态运动的能力。
4. 智能化发展阶段(2022年——):
- 在人工智能技术的赋能下,机器人具有了更加智能化的感知、交互和决策能力。
- 电驱动成为“肢体”主流技术路线,实现了更加精准的行走和操作,并提高了研发迭代速度。
- 代表产品如特斯拉公司的Optimus机器人。
- 特点:基于人工智能技术和自研的FSD(Full Self-Driving,全自动驾驶)芯片,通过端到端的神经网络模型实现任务级和动作级的决策,以及复杂环境中物体、人脸和手势等的识别。
▍技术演进
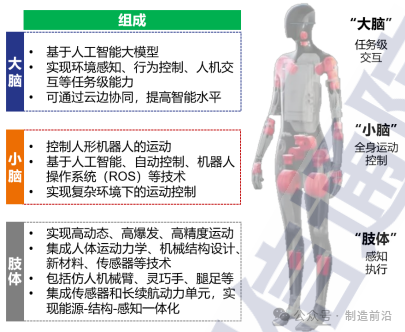
1. 技术高度集成,多角度实现对人模仿
- 人形机器人技术集成了人工智能、机械工程、电子工程等领域的创新,实现了对人的模仿,包括“大脑”、“小脑”和“肢体”三个主要部分。
- “大脑”负责环境感知、行为控制、人机交互等任务级能力。
- “小脑”负责运动控制,实现复杂环境下的运动控制。
- “肢体”负责实现高动态、高爆发、高精度运动,集成了人体运动力学、机械结构设计、新材料、传感器等技术。
2. 整机加速发展,创新产品不断涌现
- 全球范围内,美国特斯拉、Figure AI、波士顿动力等公司已成为人形机器人整机产品的第一梯队,推出了具有较高智能化水平和综合性能的产品。
3. “大脑”技术路线并行探索,具备初阶人类脑力
- 人形机器人的“大脑”技术以大模型为核心,提供任务级交互、环境感知、任务规划和决策控制能力。
- 技术路线包括LLM(大语言模型)+VFM(视觉基础模型)、VLM(视觉-语言模型)、VLA(视觉-语言-动作模型)和多模态大模型等。
- 人形机器人“大脑”向更高级的智能化和自主化发展,需要在感知模态、指令生成速度与复杂性、泛化能力提升与模型架构优化等方面形成突破。
4. “小脑”加载人工智能技术,运动方式更加拟人
- “小脑”的运动控制包括基于模型的控制方法和基于学习的控制方式两个大类。
- 基于模型的控制方法依赖于精确的动力学模型,而基于学习的控制方法使用端到端的人工智能技术,降低开发难度、提升迭代速度。
5. “肢体”多技术融合发展,技术路线逐步收敛
- “肢体”执行机构的核心驱动技术路线已由传统的液压驱动方式全面转为电驱动。
- 执行机构包括旋转执行机构、线性执行机构、末端执行机构。
- 芯片技术方面,处理器芯片是功能实现的核心,主流技术路线为CPU+GPU方案。
- 传感器技术方面,人形机器人需要多种类型的传感器,如六维力传感器、关节扭矩传感器等。
- 电源技术方面,高性能电源提供持久动力,锂离子电池是主流。
- 新材料技术方面,轻量化材料如碳纤维、工程塑料等被用于提高机器人的机动灵活性和安全性。
▍产业现状分析
人形机器人的能力等级可以分为以下五个等级:
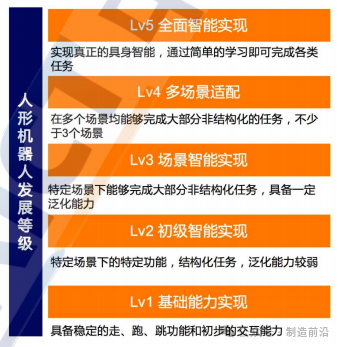
1. 第一级(Lv1)基础能力实现:
- 人形机器人具备稳定的走、跑、跳功能和初步的交互能力。
2. 第二级(Lv2)初级智能实现:
- 人形机器人能实现特定场景下的特定功能,执行结构化任务,但泛化能力较弱。
3. 第三级(Lv3)场景智能实现:
- 人形机器人在特定场景下能够完成大部分非结构化任务,具备一定的泛化能力。
4. 第四级(Lv4)多场景适配:
- 人形机器人能够在多个场景完成大部分非结构化的任务,且涉及的场景不少于3个。
5. 第五级(Lv5)全面智能实现:
- 人形机器人能够实现真正的具身智能,通过简单的学习即可完成各类任务。
人形机器人处于发展初期,未来市场规模巨大。目前全球绝大多数全能型人形机器人产品处于Lv1等级,少部分头部企业最新产品和轮式机器人等其他形态的人形机器人正在逐步向Lv2等级探索。
综合技术进展情况和需求侧情况预计,从现在到2028年,全能型人形机器人将整体处于Lv1等级,以科学研究为主要落地场景,客户主要是从事人形机器人相关软硬件研究的高校、企业等科研团队,其他形态人形机器人则加速向Lv2等级演进。我国整机市场规模约在20至 50 亿元。2028 年到 2035 年,人形机器人整体进入Lv2 等级,以特种场景应用为主,工业场景逐步落地,整机市场规模达到约50至 500 亿元。2035年到2040年,人形机器人整体进入Lv3等级,在工业场景形成规模,服务场景逐步落地,整机市场规模达到约1千至3 千亿元。2040 年到 2045 年,人形机器人整体进入Lv4 等级,实现工业场景和服务场景规模应用,整机市场规模达到约5千至1万亿元。2045 年后,人形机器人整体进入Lv5 等级,在用人形机器人超过1亿台,进入各行业领域,整机市场规模可达约10万亿元级别。
▍应用场景
1. 生产制造:
- 工业生产:如农业采摘、汽车和3C领域制造业生产等。
- 精密装配与操作:进行电路板焊接、屏幕安装、电池固定等精密装配任务。
- 柔性化生产线作业:适应不同的生产线布局和工位需求,实现产线的快速调整和重组。
- 厂内物料流转与管理:进行物料搬运、库存盘点等工作。
- 质量检测与维护:执行产品的外观检查、功能测试等质量控制任务。
2. 物流:
- 仓储管理与拣选:在大型电商仓库中,根据订单信息完成商品的分拣、打包工作。
- 搬运与装卸:进行重物搬运以及复杂环境下的货物装卸作业。
- 自主导航与调度:在复杂的仓库环境中实现自主路径规划和避障行驶。
- 最后一公里配送:将包裹直接送达消费者手中。
3. 家庭和商业服务:
- 家庭服务与陪伴:提供家政、教育、娱乐等多种服务。
- 商业服务:在展览展厅、商超酒店、网点大厅等场合提供迎宾接待、导览讲解等服务。
- 科研教育:作为教学助手进入课堂,实现科研助手、教学演示等功能。
4. 医疗健康:
- 辅助手术、康复护理等:辅助医护人员进行日常工作,降低工作强度与负担。
5. 安防巡逻:
- 在园区、工厂、仓库等区域进行巡逻监控。
6. 危险作业:
- 石油、核能、矿山、化工、消防等领域:替代人类在危险环境中进行工作。
7. 灾害救援:
- 在地震、火灾、洪水等灾害发生后,帮助救援人员快速定位受害者,提高救援效率。
这些应用场景涵盖了人形机器人在工业、服务、教育、医疗、安全等多个领域的潜在作用,显示了人形机器人技术的广泛适用性和对未来社会的重要影响。
文章由制造前沿公众号整理编辑。
▍产业链
制造前沿分析人形机器人产业链如下:
上游:原材料与零部件
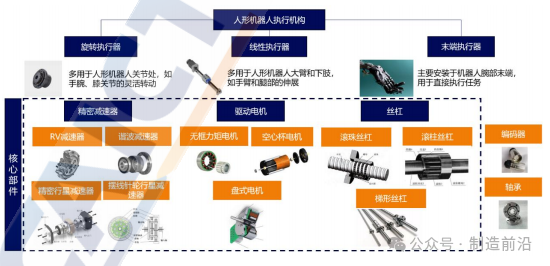
1. 减速器:
- 精密减速器是机器人的关键部件,尤其是RV减速器和谐波减速器,它们能够提供高扭矩和精确的运动控制。
- 技术难点在于提高精度和寿命,同时降低成本。
2. 电机:
- 包括无框力矩电机和空心杯电机,它们需要具备高扭矩密度和快速响应特性。
- 电机的效率和控制精度直接影响机器人的性能。
3. 丝杠和导轨:
- 用于实现精确的线性运动,需要具备高精度和耐磨性。
- 技术发展聚焦于提高负载能力和减少摩擦。
4. 控制器:
- 控制器是机器人的“大脑”,负责处理传感器信息并发送控制指令。
- 需要强大的计算能力和实时处理能力。
5. 传感器:
- 包括视觉、触觉、力觉等多种传感器,用于环境感知和交互。
- 技术挑战在于提高传感器的精度、响应速度和环境适应性。
中游:机器人本体研发设计与制造
1. 本体设计:
- 设计需要考虑机械结构的稳定性、灵活性和安全性。
- 需要在设计中融入人工智能算法,实现自主决策和运动控制。
2. 制造与集成:
- 涉及精密机械加工、电子装配和软件集成。
- 制造过程中需要严格控制质量,确保产品的可靠性和一致性。
3. 软硬件整合:
- 将硬件平台与软件算法紧密结合,实现复杂的控制和交互功能。
- 需要解决软硬件之间的兼容性和协同工作问题。
下游:终端应用
1. 工业制造:
- 需要机器人具备精确的操作能力和与现有生产线的兼容性。
- 技术挑战在于实现与人类工人的协同工作和自动化生产线的无缝对接。
2. 物流:
- 需要机器人具备高效的物料搬运能力和自主导航能力。
- 技术挑战在于提高机器人的负载能力和减少充电时间。
3. 家庭和商业服务:
- 需要机器人具备高度的交互能力和灵活性。
- 技术挑战在于提高机器人的智能水平和适应不同环境的能力。
4. 医疗健康:
- 需要机器人具备精确的操作能力和无菌操作环境的适应性。
- 技术挑战在于确保医疗操作的安全性和准确性。
5. 安防巡逻和危险作业:
- 需要机器人具备在恶劣环境下的工作能力和自主决策能力。
- 技术挑战在于提高机器人的耐用性和适应极端条件的能力。
▍未来展望
从迭代路径看,ToB市场是人形机器人发展的必经阶段,ToC市场将成为远期重点方向。从技术领域看,“大脑”小脑”属于ICT领域,“肢体”属于工业装备领域,两个领域应协同发力,融合发展。但不同阶段的发力重点各有侧重。在产业落地初期、应用规模较小时,人形机器人能否落地的重要因素就是其智能化水平,应在 ICT 领域重点发力,加快推进“大小脑”技术发展,同步补齐零部件的短板。在大规模应用阶段,成本问题成为核心因素。工业场景使用人形机器人的最基本要求是其购买、折旧、维护等的综合使用成本小于用工成本,服务场景 to C 端的用户对价格更为敏感。目前人形机器人的发布价格仍在几十万至数百万,需在工业装备领域重点发力降低成本。
商业化落地路径
- 第一阶段(2024—2030年):政策牵引,深入挖掘危险作业、极端环境等高价值场景,遴选一批可落地可推广的典型需求。政府搭桥,推动特种应用场景供需双方对接,定向开发一批产品并落地应用。
- 第二阶段(2030—2035年):加快探索工业制造、物流等制造业相关的大规模应用场景,从“替代相对简单且重复性的劳动”开始,成熟一代应用一代,在迭代中加速技术成熟、降低单体成本、提升整体性能,逐步提高对制造业场景的渗透率。
- 第三阶段(2035年后):加强人工智能与人形机器人的融合创新,实现更高水平的具身智能,并推动人形机器人进入医院、学校、商场、餐厅等服务业场景,最终走入千家万户。
※以上内容由制造前沿整理自《人形机器人产业发展研究报告(2024年)》
来源:制造前沿



