
微型移动机器人,凭借其远程控制和先进移动能力,在疾病诊断、治疗、触发和局部药物输送以及外科手术等微创医疗操作中展现出巨大应用潜力。
然而,要在人体内复杂多变的环境中稳定执行这些任务,微型移动机器人必须实现对目标表面的精细粘附控制。特别是在小尺度环境下,机器人与粘合、摩擦和表面能相关的问题变得尤为复杂,如何使机器人在人体内的稳定固定和移动成为了一项关键技术挑战。
尽管粘合控制是微型机器人在如人体内粗糙、有纹理表面和软组织等各种环境中执行实际任务的基石,但其作用在过去的研究中往往被低估和忽视。尤其是在小尺度环境下,机器人与粘合、摩擦和表面能相关的问题呈指数级增长,变得尤为复杂,这使得操纵机器人在人体内的稳定固定和移动成为一大难题。
在此背景下,研发一种既可逆又简单易行且高度可靠的粘合控制机制,对于微型机器人在复杂多变的生物环境中实现有效应用具有举足轻重的意义。然而,鉴于微型软机器人的远程操控特性及其独特的作业环境,如何精确控制其对各类目标表面的粘附力,成为了一项亟待解决的重大技术难题。
特别需要强调的是,在低预紧力条件下,如何赋予机器人“精准而温和地抓取那些皱褶繁多且质地柔软的生物组织或非生物材料,同时避免造成任何损伤”这一能力成为破局的关键。
▍受丝绒虫分泌物启发,提出可远程控制磁性粘合机器人
针对以上问题,由德国马克思普朗克智能系统研究所携手高丽大学、汉阳大学以及韩国科学技术研究院等多家高校科研人员组成的联合研究团队进行了深入研究,并受丝绒虫分泌物的启发,提出了一种可远程控制磁性粘合机器人。
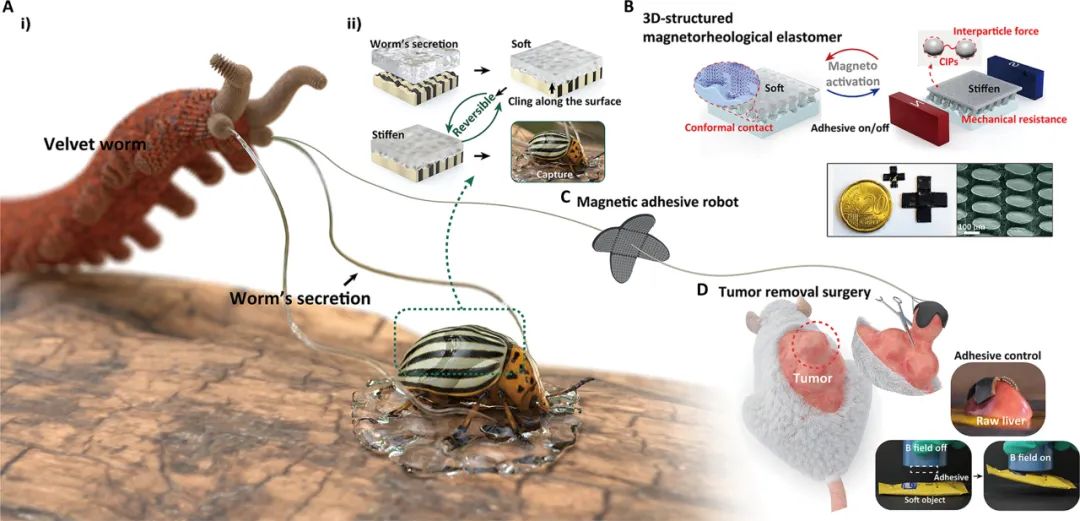
该机器人巧妙地整合了磁流变弹性体(MRE)作为其核心机械构造。MRE由磁性微/纳米颗粒构成的三维网络与弹性体基质复合而成,在强磁场作用下,颗粒间磁力的增强限制了聚合物链的移动性,进而提升了弹性体的刚度。得益于这种独特的材料特性,该机器人能够适应并抓取表面粗糙度和刚度各异的物体,这些物体在尺寸上跨越多个长度尺度,且通过远程磁场的调控,机器人能够轻松实现在开/关状态间的即时转换。
此外,研究团队还进一步提出了一种材料建模和设计策略,以优化对粘合力、弹性模量和磁场引起的表面能转换的控制。通过利用外部磁场精确控制机器人的刚度状,研究团队成功实现了对猪组织复制品的稳定抓取(~2.93 N/cm 2)。
基于 MRE 的蘑菇形 3D 结构则扩大了可能抓取物体的范围并有效降低了所需的预紧力(~0.5 N/cm 2),解决了易碎物体的变形或损坏问题以及微型机器人低力限制。
为了验证机器人的实际性能,研究团队进行了一系列抓取应用实验。结果显示,这款微型粘合机器人能够精确稳定地抓取和运输各种易碎物体,如软豆腐、湿鲑鱼子和湿滑的器官,甚至在协助小鼠肿瘤切除手术中也展现出了良好的应用效果。
该研究不仅为微型移动机器人在粘合控制方面提供了创新解决方案,还进一步拓展了其在微创医疗操作领域的应用前景。
那么该研究具体是如何实现的呢?接下来和机器人大讲堂一起深入了解~
▍定制化改造,机器人核心MRE的材料设计与制作策略
在可切换粘附研究中,形状记忆聚合物(SMPs)和磁流变(MR)材料等展现出巨大潜力,但也面临诸多挑战。
在可切换粘附材料的研究领域,形状记忆聚合物(SMPs)与磁流变(MR)材料因其独特的性能而备受瞩目,但同时也面临着时间依赖性、热稳定性、制造复杂性及流体特性等多重挑战,且其粘附机制尚未得到充分的理论建模支持。这些挑战限制了它们在微型机器人及工业应用中的进一步发展和应用。
磁触发MRE(磁响应弹性体)具有出色的磁响应性,是可切换粘附研究的理想材料。因此研究团队选择MRE作为可远程控制磁性粘合机器人的制作材料,并为了克服其在弹性模量、表面能、时间依赖性和可重复性等方面的不足,对其进行了定制化改造。
为提升MRE的磁响应性,研究团队选择了软磁颗粒(羰基铁粉CIPs)与高度柔软的弹性体Ecoflex-10作为复合材料的主要成分。通过精细的复合混合工艺,他们成功解决了CIP团聚问题,确保了颗粒在基体中的良好分散性和最小孔隙率。这一成果得到了扫描电子显微镜(SEM)的证实。此外,额外的热固化处理进一步减少了CIPs在基体中的沉降,实现了聚合物的快速固化。
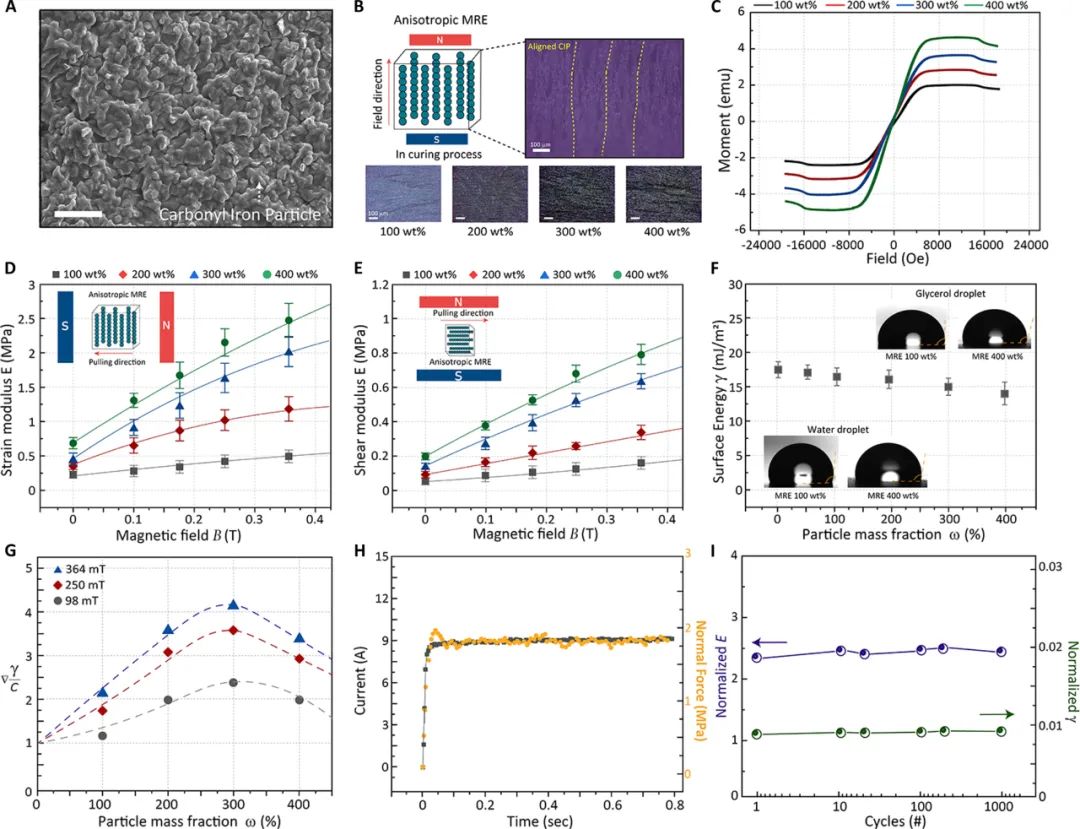
值得注意的是,MRE表现出的各向异性特性也为材料设计带来了新的挑战。研究团队发现,外部磁场触发的磁通量决定了基体固化前颗粒的排列方向,进而影响MRE的磁响应性。通过精确控制磁场方向和固化过程,他们实现了CIPs的单轴排列,从而增强了MRE的各向异性磁响应。
在填料结构设计方面,研究团队通过优化填料加载浓度,成功提升了MRE的粘附控制性能。他们发现,弹性模量和表面能的变化对粘附效果至关重要。随着CIP比例的增加,MRE的磁矩变化更为显著,同时拉伸模量也相应增大。然而,填料增加也会提高初始模量,导致材料模量变化率降低。因此,研究团队需要仔细权衡填料比例与粘附性能之间的关系。
此外,研究团队还深入研究了表面能这一重要粘附参数的变化。他们通过甘油和水滴的接触角以及基于Owen-Wendt方程的理论计算,确定了不同填料比例下MRE的表面能。实验结果表明,随着填料比例的增加,表面能降低,但根据磁场的变化率略有增加。
为了找到最佳的粘附控制强度,研究团队建立了粘附顺应性(C)和表面能(γ)与颗粒质量分数之间的关系模型。通过模型预测和实验验证,他们确定了材料粘附变化最大的临界质量分数为300 wt%。同时,他们还检查了MRE中模量变化所需的时间,以验证其作为快速精确夹持材料的适用性。实验结果显示,模量转换时间小于60毫秒,满足了快速响应的需求。
最后,研究团队通过重复磁场条件下的机械转换率和表面能变化验证了MRE作为抓手材料的耐用性。经过1000次磁场循环测试后,MRE仍保持良好的粘附性能和机械稳定性。
▍提出材料建模和设计策略,深入探讨背后物理机制
为了优化对粘合力、弹性模量和磁场引起的表面能转换的控制。研究团队还进一步提出了一种材料建模和设计策略,深入分析了采用三维结构MRE及不同配比,对具有不同表面粗糙度和刚度的物体进行粘附控制的过程,并细致探讨了其背后的物理机制。
当无外部磁场作用时,MRE粘合剂凭借其独特的柔软性,能够紧密地贴合在目标物体表面,形成广泛的接触面积。这种柔软的初始状态是确保粘附效果的基础,因为它允许粘合剂与目标物体之间的微小间隙被充分填充,从而建立起强大的粘附力。
随着外部磁场的逐渐增强,MRE内部的颗粒间力开始发挥作用。这些力限制了聚合物的恢复力,即当外部力试图使粘合剂与目标物体分离时,聚合物分子链之间的相互作用力。同时,磁场的增强还导致了MRE弹性模量的提高。弹性模量是衡量材料抵抗变形能力的指标,模量的增加意味着粘合剂在受到相同外力作用时,更不容易发生形变,从而增强了粘附强度。
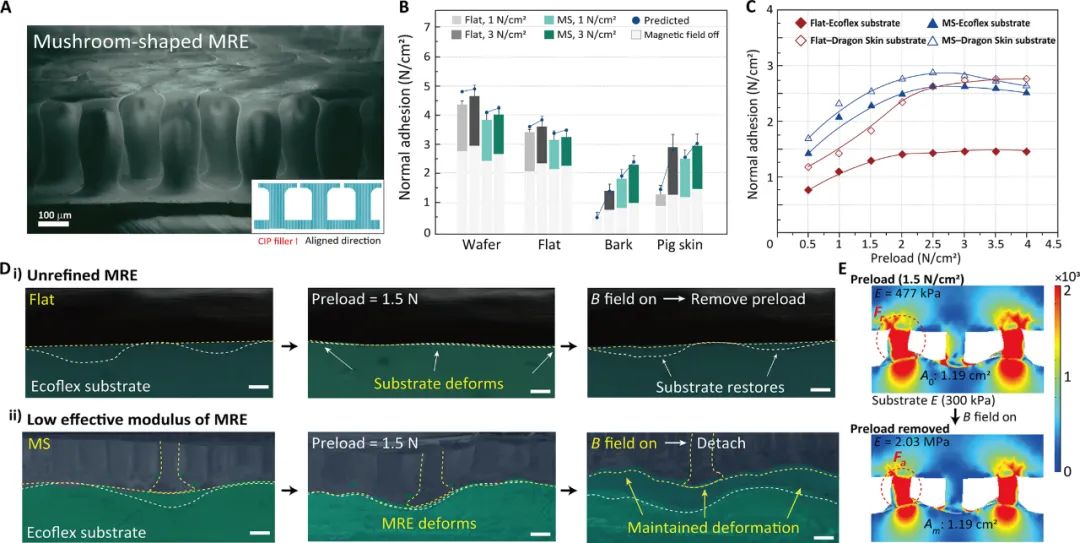
对于平滑表面如晶片而言,由于表面形貌相对简单,粘附力的提升主要受益于模量的增加。然而,在粗糙表面上,情况就复杂得多了。MRE粘合剂会沿着表面的皱褶变形,以适应其复杂的形貌。在这个过程中,磁场驱动的CIPs(羰基铁粉)吸引力的增加起到了至关重要的作用。它们不仅限制了聚合物的恢复力,防止了由于弹性模量升高而导致的接触面积减小和粘附力下降,还通过增加粘合剂与目标物体之间的相互作用力,进一步增强了粘附稳定性。
为了更全面地了解MRE粘合控制过程,研究团队采用了基于有限元分析(FEM)的数值模拟方法。他们构建了精细的数值模型,模拟了MRE粘合剂在不同条件下的行为变化,并通过方程计算对比了弹性体的恢复力和颗粒间吸引力。这些分析不仅揭示了MRE粘合剂在粘附过程中的力学机制,还证实在高弹性粘合结构中,为实现更大粘附强度而分离非平整表面时,优越贴合接触的必要性。
此外,研究团队还深入探讨了MRE粘合剂的3D结构在提高抓手对柔软、皱褶表面适用性方面的重要性。他们发现,3D结构能够显著降低MRE的有效弹性模量,使其更加柔软且易于适应目标物体的表面形貌。特别是蘑菇形结构的MRE,其柱状几何设计和层次结构产生的范德华力,能够在粗糙表面上形成稳定的接触,提供稳健的粘附性能。这种设计不仅提高了粘合剂的粘附效率,还为其在微型机器人、智能抓取系统等领域的应用提供了广阔的前景。
与以往的MR研究相比,研究团队在使用MRE方面具有明显的理论和验证优势。
▍进行抓取实验与肿瘤切除手术辅助,验证机器人实际性能
为了验证机器人的实际性能,研究团队还进行了一系列抓取应用实验。
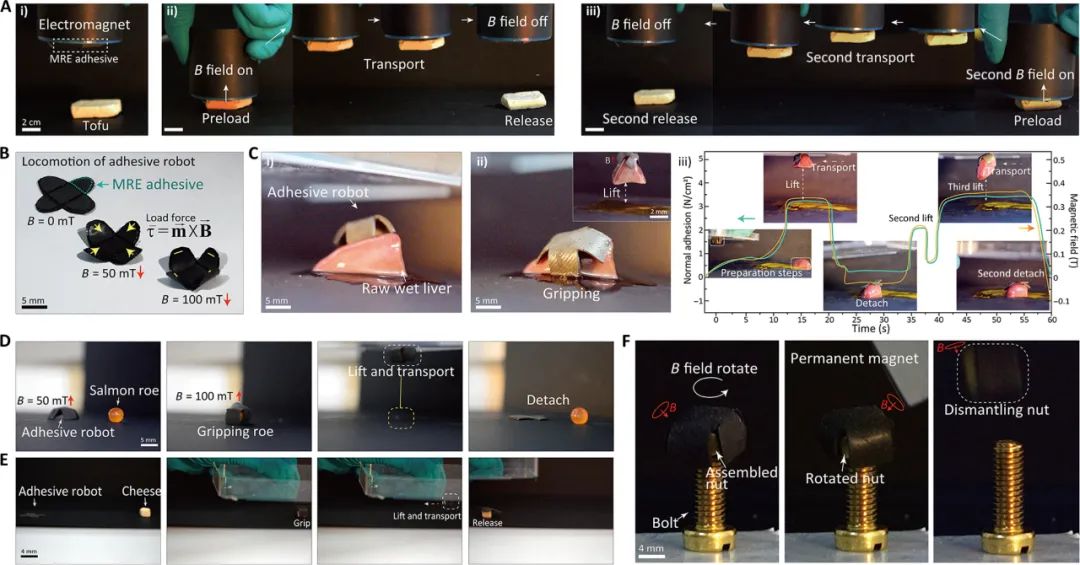
在抓取与操控物体的测试中,研究团队将MRE粘合剂整合到受磁控导航的软毫米机器人中,成功实现了对多种物体的灵活操控。实验显示,这种结合MRE粘合剂的机器人能够轻松抓取、提升和运输湿润、柔软的物体,如豆腐、生肝样本等,甚至在柔软、光滑的生物组织上也展现出了强大的粘附力。此外,机器人还能牢固抓取装配在螺栓上的螺母,并响应旋转磁场产生旋转扭矩,从而拆下螺母,展示了其在复杂任务中的潜力。
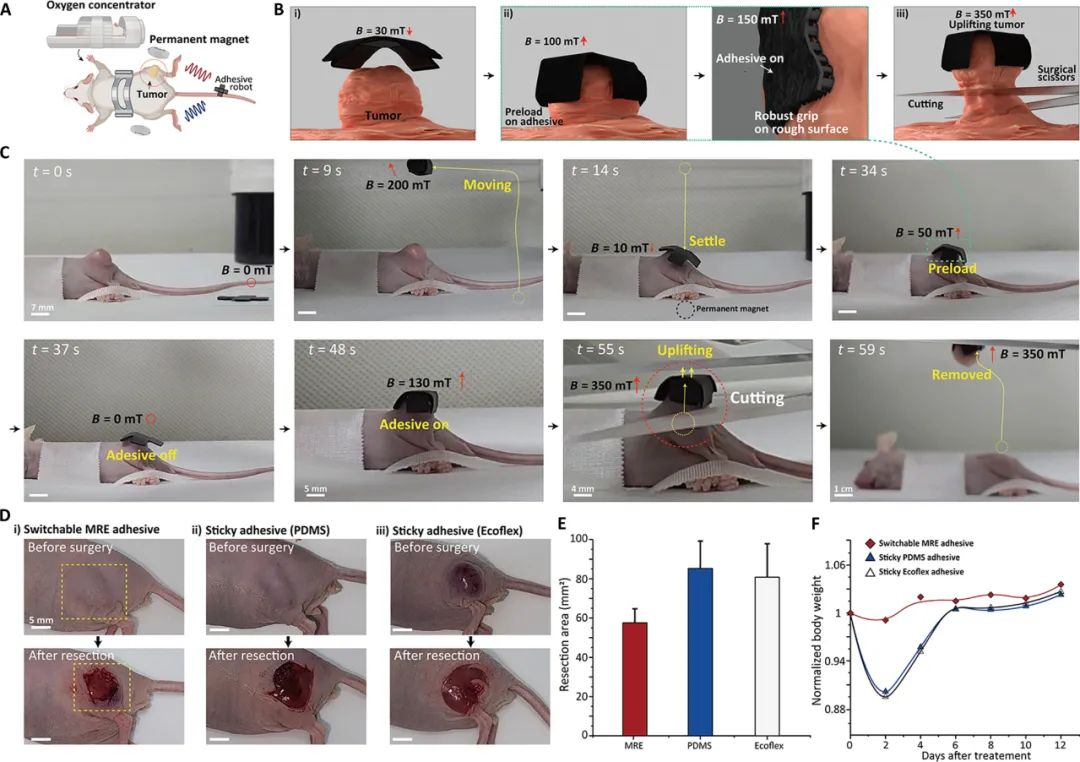
在肿瘤切除手术辅助实验中,研究团队通过体内实验验证了粘附机器人在远程切除手术中的应用。由于肿瘤细胞表面柔软且皱褶,传统手术工具难以在不损伤细胞的情况下抓取。而粘附机器人则通过平滑、精确的粘附,成功克服了这一难题。实验显示,机器人能够精确地抓取并提升肿瘤细胞,仅切除需要切除的部分,为体内手术提供了新的可能性。通过与配备不可切换粘合剂的机器人进行对比,研究团队进一步强调了可切换粘合剂在精确远程手术中的重要性。
参考文章:
https://www.science.org/doi/10.1126/sciadv.adp8260



