
受生物启发的仿生多关节蛇形机器人,因其无肢结构和高度灵活性,具有超强地形适应性。
然而,传统的多关节蛇形机器人由于包含数十个电机单元,其机体结构笨重且功耗高达数百瓦,耗能巨大,这成为制约其广泛应用的主要瓶颈。

针对这一问题,来自九州大学和东京大学的研究团队进行了深入研究,并提出了一种关节可重新定位的内置无线平面蛇形机器人。
该机器人由一连串灵活的无源连杆构成,巧妙运用低功耗的欠驱动系统,模拟出多关节的灵动运动。其独特之处在于,能够借由内置齿条与齿轮的精密配合,灵活调整电机驱动的关节单元位置,从而动态变换关节的耦合布局。
此外,机器人身披一层软质皮肤,该皮肤不仅触感柔和,更兼具无线充电功能,可为内部关节单元源源不断地输送稳定电能。这一突破性设计从根本上规避了传统蛇形机器人因线缆缠绕或断裂而引发的种种困扰,极大增强了机器人的稳健性与实用性。
通过将关节的可重新定位机制与无线充电的柔软皮肤完美融合,这款机器人不仅实现了高度的弯曲灵活性,更在结构上实现了轻量化突破,其整体重量仅1.3公斤,同时无线电力传输的能耗也低至7.6瓦,在节能与高效方面优势明显。
那么,该机器人具体是如何实现的呢?接下来和机器人大讲堂一起来深入探索~
▍机器人的设计与实现
研究团队提出的内置无线平面蛇形机器人主要通过结合可重新定位的关节机制、支持无线充电的机器人皮肤和原型实现。
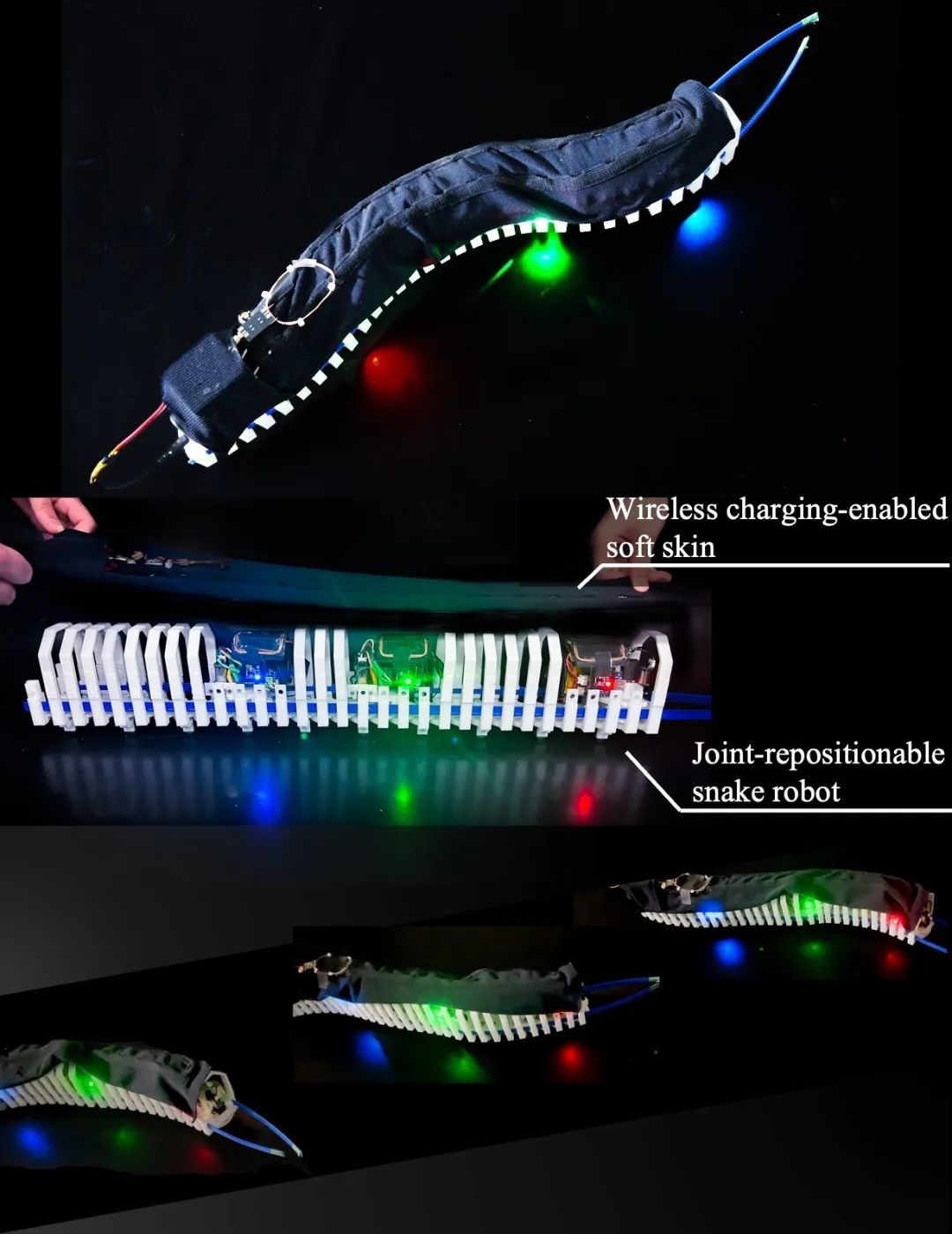
关节可重新定位的内部无线平面蛇形机器人的概念
其中可重新定位的关节机制是设计的核心。它通过一个外骨骼主体和串联连接的连杆、柔性齿条以及电机驱动的关节单元实现。这种机制使得机器人能够像蛇一样进行蜿蜒运动,同时显著减少了所需电机的数量。
关节单元中的电机控制齿条的移动,从而形成S形弯曲或沿着齿条前后移动,实现了机器人的灵活运动。此外,这种关节机制还提供了两种运动方式:无需关节精确定位的蜿蜒运动和基于关节位置的障碍辅助运动,使机器人能够适应各种复杂地形。
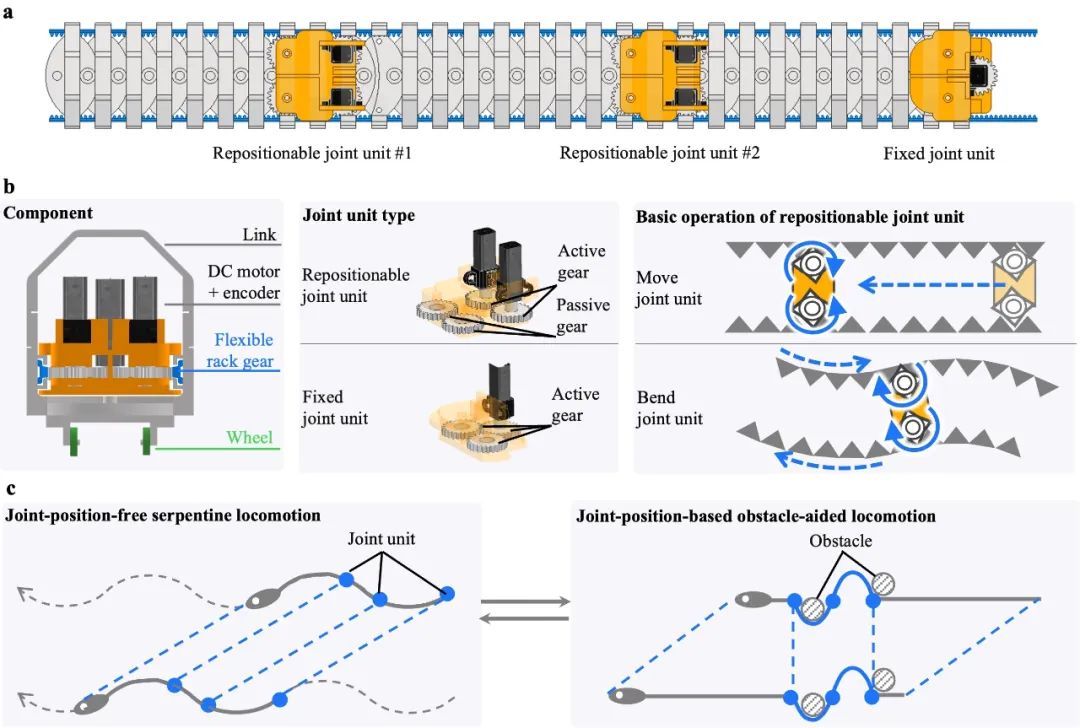
关节可重新定位、内部无线平面蛇机器人的设计与操作
为了支持可重新定位的关节结构并实现持续无束缚操作,研究团队还采用了支持无线充电的机器人皮肤。这一皮肤由连接到电源模块的发射器螺旋线圈和接收器螺旋线圈组成。通过感应耦合,发射器线圈能够无线地将交流电传输到接收器线圈,进而为关节单元提供电力。

支持无线充电的软体机器人皮肤的设计概述
为了优化电力传输效率,研究团队对螺旋线圈的尺寸进行了精心选择,并考虑了机器人内部金属电机与感应场的相互作用。这种无线充电方法不仅提高了机器人的续航能力,还避免了电线缠绕或断裂的问题。
原型的实现则展示了研究团队这一设计的可行性和实用性。在实现过程中,研究团队使用基于液态金属的纺织发射器线圈和可重新定位的关节机制构成了支持无线充电的软体皮肤原型,并使用由3D打印的被动连杆、柔性齿条和关节单元组成关节机制,使用基于液态金属的可拉伸管制成具有高度可拉伸性和导电性的发射器线圈。
其电源模块则包括D类放大器、直流移动电源和USB PD电缆,为发射器线圈提供电力。接收器线圈由铜线、全桥整流器、DC-to-DC整流器和电池管理器组成,将接收到的电力转换为关节单元所需的直流电。
▍机器人的建模与控制
在建模与控制方面,研究团队也进行了深入且系统的探索。
在建模环节,研究团队首先根据机器人的物理结构和运动特性,构建了精确的数学模型。这一模型不仅考虑了机器人的物理结构,如柔性连杆、齿条、关节单元等,还深入分析了其运动学特性。通过计算机仿真技术,研究人员对模型进行了大量的测试与优化,以确保机器人在实际运动中的性能达到预期。
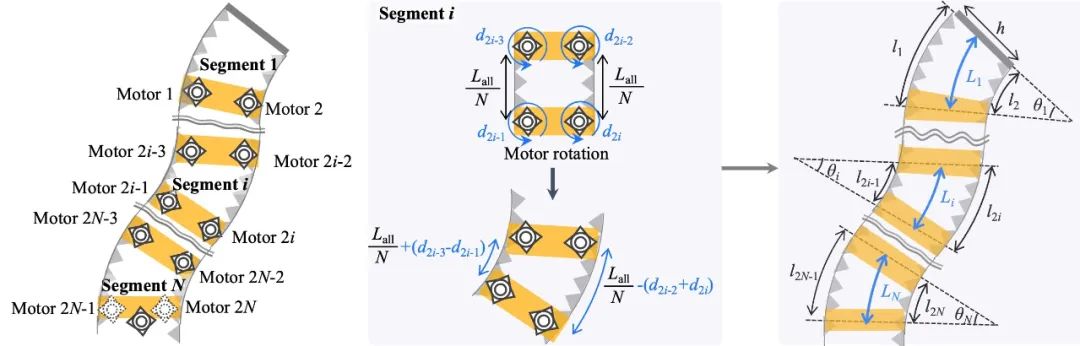
可变长度弧形关节模型的示意图
在数学模型的基础上,研究团队着手设计机器人的物理原型。他们精心挑选了轻质、高强度的材料来制作机器人的各个部件,以确保机器人在保持轻便的同时,也能具备足够的强度和耐用性。柔性连杆的设计使得机器人能够像蛇一样进行弯曲和扭转,而齿条和关节单元的巧妙结合则实现了关节的可重置功能。
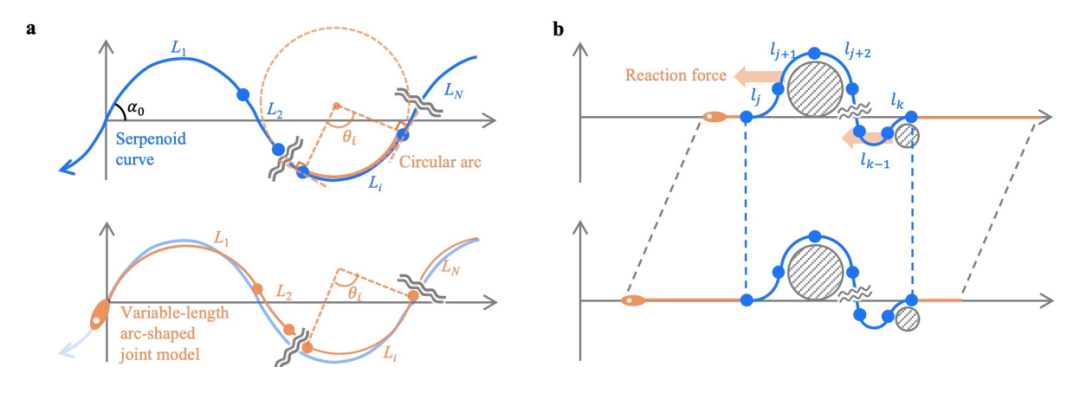
使用可变长度弧形关节模型的运动控制策略
在控制部分,研究团队针对机器人的特殊结构和运动需求,设计了一套高效且稳定的控制策略。他们利用先进的控制算法,如PID控制、自适应控制或滑模控制等,对机器人的关节运动进行精确调控。
同时,考虑到机器人无线充电过程中可能存在的电能波动和传输效率问题,控制策略还融入了对电能管理的优化,确保机器人在运动过程中能够持续稳定地获得所需电能。通过调整关节单元的位置和速度,机器人可以实现爬行、转弯、翻滚等多种运动模式。

机器人皮肤的无线充电能力
▍机器人性能试验与测试
在实验部分,针对关节可重新定位的内置无线平面蛇形机器人,研究团队开展了无线充电能力测试、运动性能测试、应用场景测试等一系列全面且深入的实验验证,以评估机器人的性能、可靠性和实用性。
无线充电能力测试
无线充电是机器人的一大亮点。在实验测试中,研究团队对机器人的无线充电能力进行了全面的评估。他们测试了机器人在不同距离、不同弯曲姿态以及不同环境条件下的充电效率。结果表明,机器人的软皮肤能够高效地接收电能,并将其传输到内部关节单元,从而确保了机器人的持续运行。
运动性能测试
运动性能是评估机器人好坏的重要指标之一。在实验中,研究团队对机器人的运动性能进行了详细的测试。他们观察了机器人在不同地形上的爬行速度、转弯半径以及避障能力等。测试结果显示,机器人能够准确模拟蛇类的运动方式,实现快速、灵活的爬行。同时,它还具备很强的地形适应性,能够在狭窄的空间中穿行,也能在复杂的环境中避障。
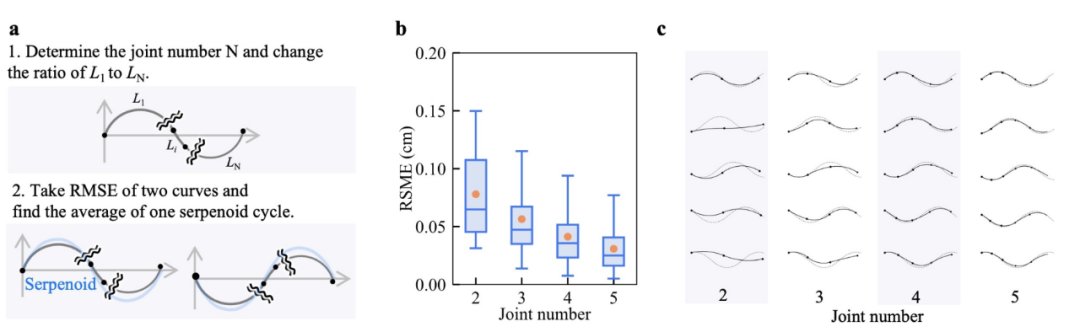
基于仿真的蛇形运动精度测量
应用场景测试
除了基本的无线充电和运动性能测试外,研究团队还针对机器人的应用场景进行了测试。他们模拟了搜救、勘探、检测等实际场景,评估机器人在这些场景中的表现。结果表明,机器人凭借其优异的性能和灵活性,能够很好地完成这些任务,为相关领域的应用提供了有力的支持。
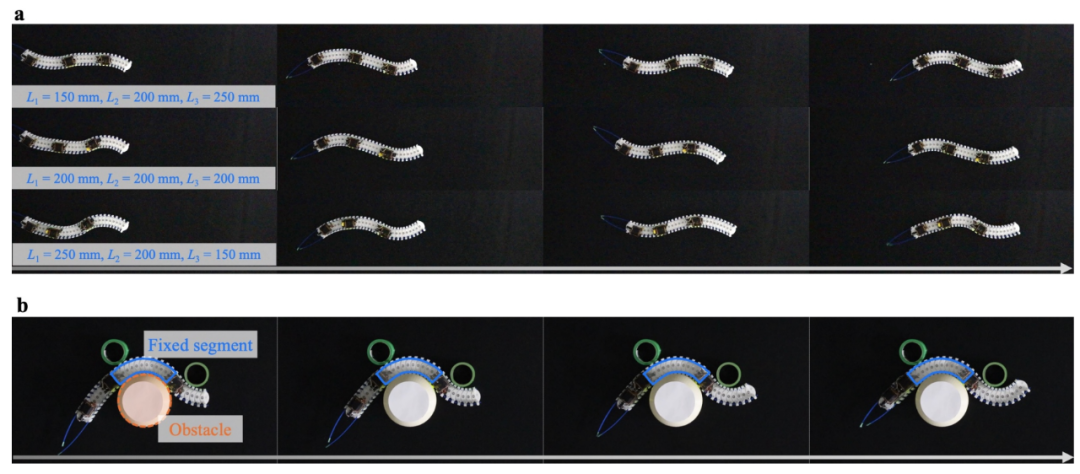
两种类型的运动控制策略的演示
通过精心的设计和严格的实验测试,研究团队验证了关节可重置式无线蛇形机器人的卓越性能和广泛的应用前景。
参考文章:https://arxiv.org/abs/2411.13916



