
毅力号火星车等轮式移动机器人(WMRs),以车轮为唯一移动方式,专为平坦和崎岖地表移动设计,因其高度通用性和环境适应性,在农业、国防、工业、物流、紧急搜救乃至行星探测等多个领域均得到了广泛应用。
然而,面对楼梯、台阶和陡坡,WMRs常因结构限制难以应对。对此,大多数研究人员尝试通过改装提升其多功能性和稳定性。一般来说,WMRs的改装主要有两种方法:
一是加装混合机制,如轮式、履带式和腿式,形成地形自适应移动机器人(TAMRs)。TAMRs在辅助机构帮助下,具备高机动性,能根据地形调整形态,保持高效移动。但TAMRs设计和控制复杂,存在需大量执行器,且静态稳定性不足等问题。

另一种方法是使用可变形结构。车轮尺寸的最优选择对于应对多变地表、复杂环境导航、确保稳定性及优化能耗具有重要影响。可变直径WMR通过嵌入异形主动/被动机构,能够调整车轮直径适应不同地形,并优化速度、提升能源利用效率和机动性。但目前,大多数可变直径WMR系统只能进行越障等单一应用,在执行器多的同时,还牺牲了多功能性,增加了复杂性和轮廓。
▍0.74秒内闭合!打造最强可变直径WMR?
针对这一问题,来自哈萨克斯坦纳扎尔巴耶夫大学的研究人员进行了深入研究,并提出了一种名为“Improbability Roller”的移动机器人。
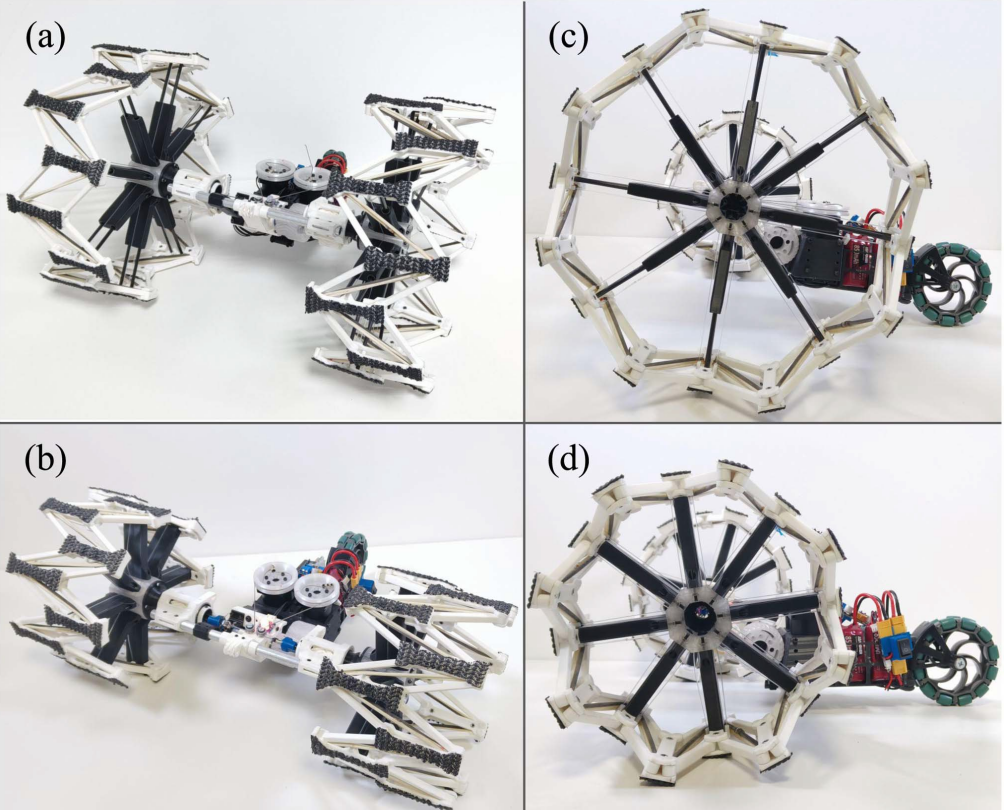
该机器人配备了两个可变直径的车轮,能够动态调整车轮直径,且使用仅三个执行器便可实现前进/后退、转向及独立调节车轮直径,从而在不同地形和任务间无缝切换。
同时,机器人采用了电缆驱动的驱动机构,可在0.74秒内闭合车轮,是该领域最快的驱动机构,这增强了其对不可预见环境和操作要求变化的响应能力。为验证性能,研究团队开发了一个运动学模型来分析机器人的运动学特性,以确保能准确预测不同轮径下的行为。
此外,研究团队还制定了一个开环控制策略。该策略允许机器人根据预设参数进行移动、转向和调整轮径等基本操作。在实行开环策略的情况下,研究团队通过跟踪不同速度下的轨迹,团队验证了该方法的有效性。
值得一提的是,为了验证机器人性能,研究团队还进行了一系列实验验证,包括轨迹跟踪测试、直径调整速度测试、转向角效应测试、爬坡能力测试和能效测试,以评估导航精度、轮径变化响应时间、转向角度影响、坡度性能和能源消耗。
该研究成果的相关论文已以“Design and Implementation of a Mobile Robot With Variable-Diameter Wheels”为题发表在 IEEE/ASME T - MECH上。
接下来,和机器人大讲堂一起来深入了解这一内容吧!
▍“Improbability Roller”机器人设计与制作
“Improbability Roller”机器人的设计与制作融合了机械设计、运动学建模、开环控制和嵌入式系统架构等多个技术办款。
在机械设计方面,“Improbability Roller”机器人的机械设计引入了可变直径车轮机制,突破了传统固定直径机器人的局限。该机制通过伸缩杆、可扩展轮毂和柔性结构的组合,实现了车轮直径的动态调整,不仅增强了机器人与地面的接触面积,提升了牵引力和稳定性,还实现了机器人的超强地形适应能力。此外,机器人底盘作为整个结构的支撑基础,采用了轻量且坚固的设计,以确保在承受操作负载的同时保持高效移动。
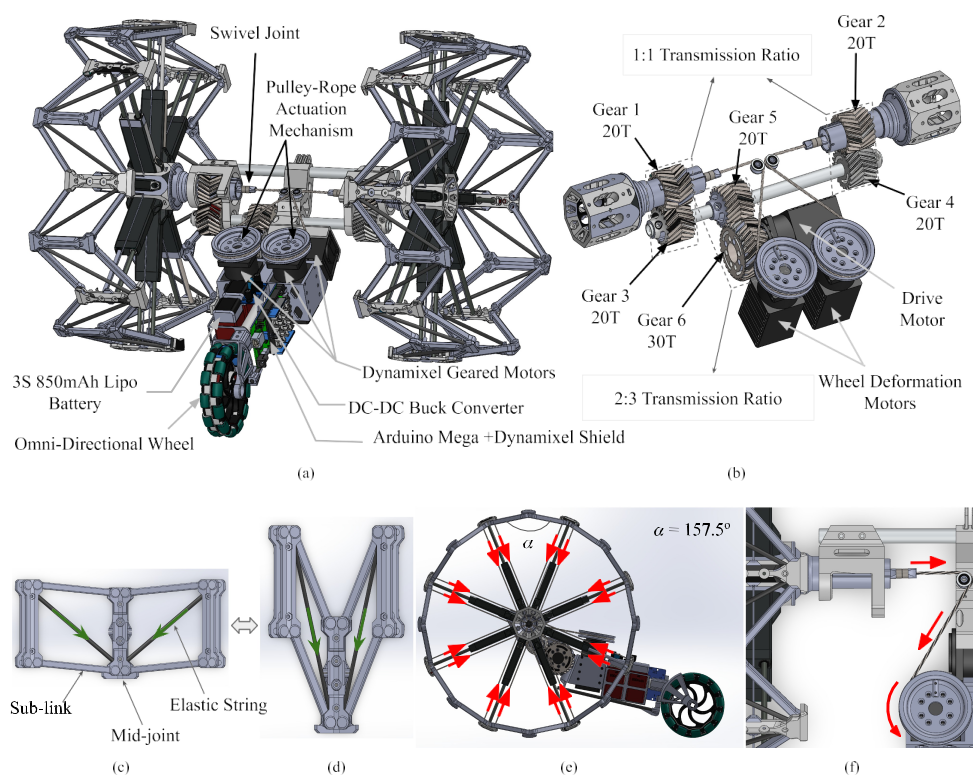
机器人车轮的设计灵感源自NASA的可折叠太阳能阵列项目,采用了类似的可扩展框架。具体来说,车轮由多个通过三个关节连接的子链接段组成,每个子链接段都支持车轮的平滑地扩展和收缩。车轮直径的动态变化则依赖于固定在每个子链接段中部关节上的线性杆,这些线性杆通过线性轴承滑动。当对连接在关节上的字符串施加拉力时,会产生向车轮结构中心拉动的力,从而实现车轮直径的调整。为了快速且高效地实现这一调整过程,研究团队特别设计了一个由齿轮电机驱动的滑轮系统。
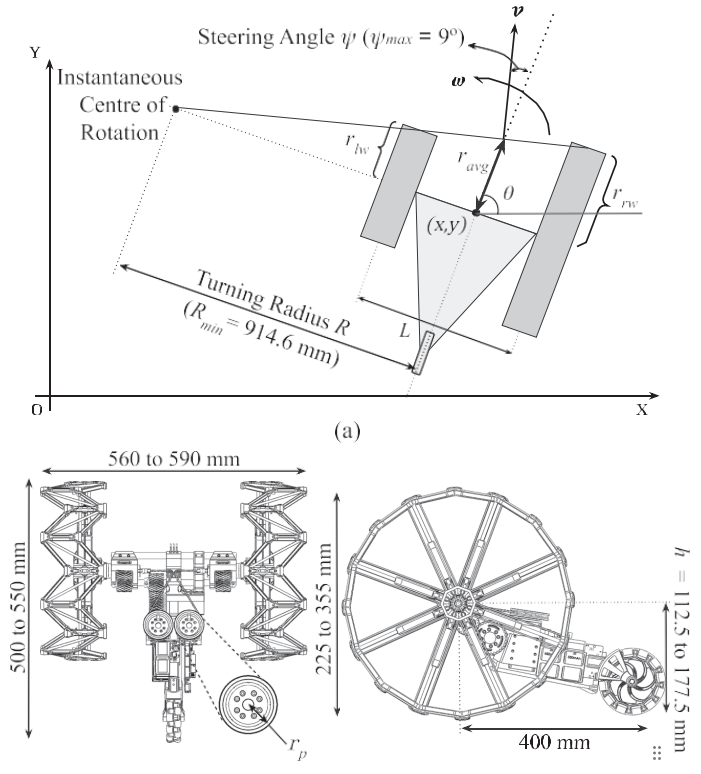
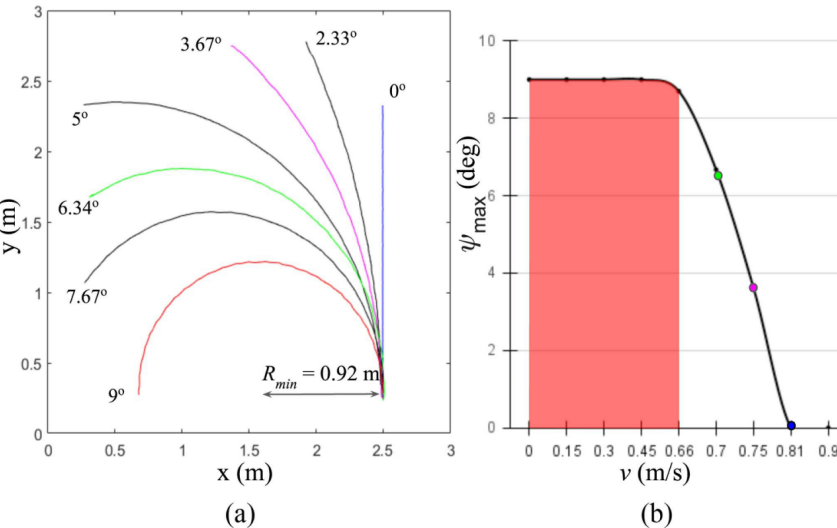
在运动学建模方面,为了描述机器人在实际环境中的运动状态,研究团队为“Improbability Roller”机器人构建了精确的运动学模型。该模型全面考虑了机器人的位置、高度、方向角等关键参数,并深入剖析了车轮半径与车轮变形电机角速度之间的关系,考虑了驱动电机的齿轮比,以及机器人线性速度和角速度的计算方法。通过这一模型,研究团队能够准确预测机器人在不同控制输入下的运动轨迹,这为后续控制策略的制定提供了有力支持。
在开环控制方面,研究团队基于运动学模型,为“Improbability Roller”机器人量身定制了开环控制策略。该策略通过预定的轨迹配置文件来指导机器人的运动,实现了轨迹跟踪和远程操作模式的双重功能。操作员可以实时提供线性速度和转向角的参考值,系统则通过运动学模型将这些参考值转换为执行器命令,从而实现对机器人的精准控制。

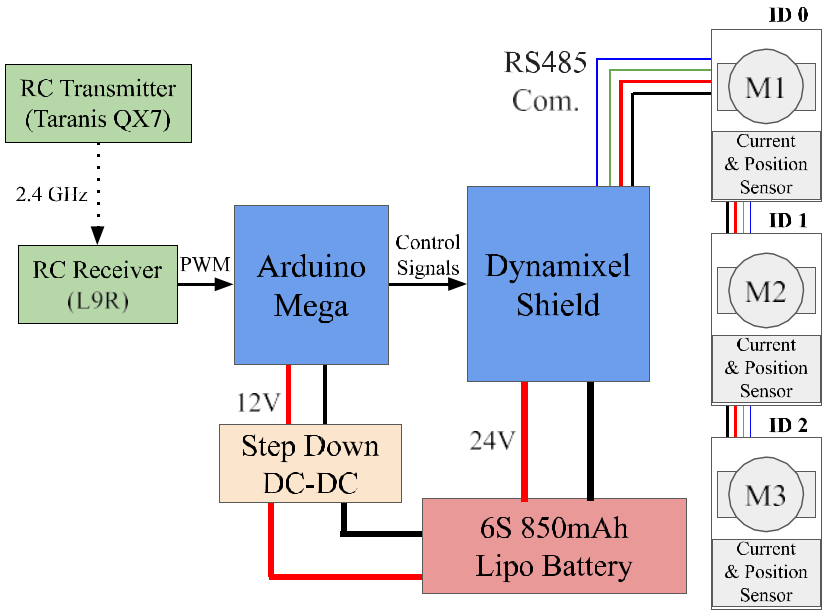
在嵌入式系统架构方面,“Improbability Roller”机器人采用了Arduino Mega2560微控制器作为主处理单元,并配备了先进的电机驱动器、无线通信模块和电源系统。这一架构不仅确保了机器人能够高效接收并执行高级命令,还实现了与Dynamixel齿轮电机的无缝连接和多点网络通信。同时,2.4GHz无线RC控制器和8摄像头运动捕捉系统的加入,进一步提升了机器人的远程操作精度和轨迹跟踪能力。整个系统由高性能的LiPo电池供电,并通过降压转换器确保电压稳定,为机器人的持续运行提供了可靠保障。
▍“Improbability Roller”机器人实验与测试
为了评估“Improbability Roller”机器人的开环轨迹跟踪、车轮的打开和关闭速度、不同转向角下的性能、不同车轮尺寸的爬坡能力以及各种条件下的成本运输指标,研究团队进行了一系列实验来进行基准测试。
车轮尺寸变化实验
该实验旨在验证“Improbability Roller”机器人车轮尺寸变化的快速性和稳定性。相较其他驱动机构,利用电缆滑轮机制的“Improbability Roller”机器人,能够在极短的时间内(0.74秒)将车轮尺寸从最大直径调整至最小直径。这种快速的致动能力对于机器人在实时适应环境和障碍方面至关重要。实验还显示,在车轮从扩展状态变形至压缩状态时,电机电流消耗达到峰值(约1A),而在返回至默认(扩展)状态时,由于利用了弹性字符串中储存的势能,电机电流消耗降低至约0.6A。
轨迹跟踪与转向性能实验
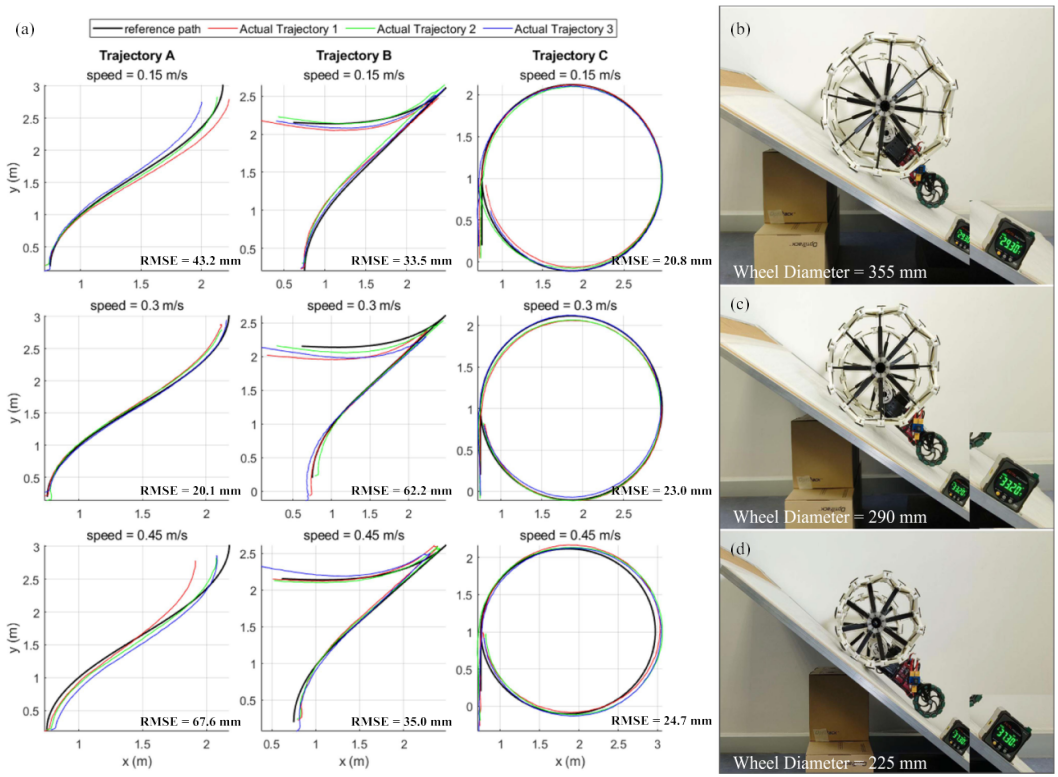
该实验旨在评估机器人的轨迹跟踪精度和转向性能。“Improbability Roller”机器人配备了独特的转向机制,可通过独立调整两个车轮的直径来实现不同的转向角。研究团队在不同速度和复杂轨迹下对机器人的转向性能进行了全面评估。实验结果显示,机器人在S形轨迹、复杂路径和直线加圆形轨迹等多种轨迹上均表现出了出色的轨迹跟踪精度。同时,通过比较实际轨迹与模拟轨迹的均方根误差(RMSE),研究团队进一步验证了机器人在真实世界应用中的潜力。
爬坡实验
该实验旨在验证机器人在不同坡度上的稳定性和越障能力。可变直径车轮使“Improbability Roller”机器人在爬坡能力方面表现卓越。通过调整车轮直径,机器人能够控制其质心位置,从而增强在斜坡上的稳定性和平衡性。实验结果显示,随着车轮直径的减小,机器人的爬坡能力显著增强。在车轮直径为225mm时,机器人甚至能够成功攀爬高达37°的斜坡而不发生滑移。
现实场景实验
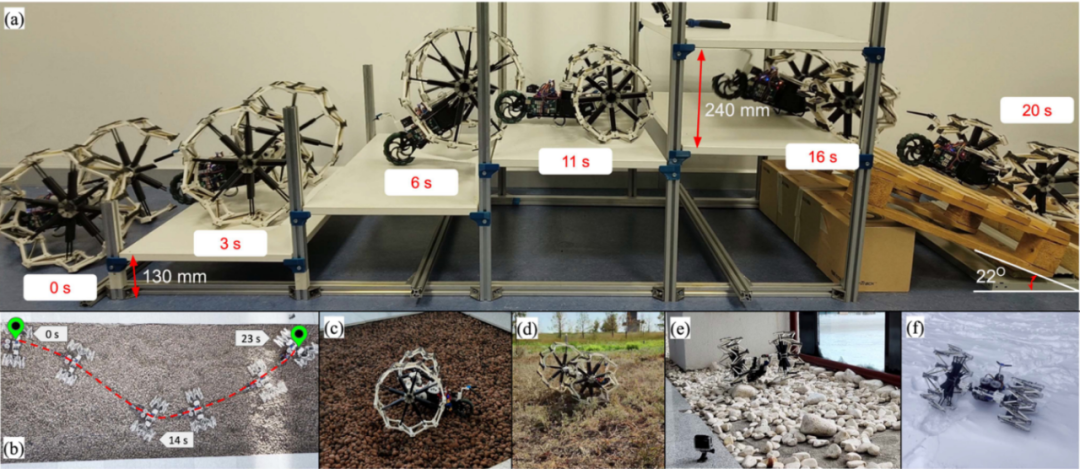
在现实场景实验中,研究团队模拟了多种复杂地形和任务场景以全面评估“Improbability Roller”的实际应用潜力。机器人成功攀爬了高度为130mm的楼梯、穿越了宽度仅为240mm的狭窄空间,并在20秒内连续完成了这三项任务。此外,机器人还在松散的碎石、草地、岩石和雪地等多种地形上展现了其出色的地形适应能力和稳定的转向性能。在最大负载实验中,机器人更是承载了超过自身重量的额外4公斤负载,且车轮仍未发生变形。
能耗效率实验
该实验旨在评估机器人在不同车轮尺寸和速度下的能耗表现。研究团队采用成本运输(CoT)指标评估了“Improbability Roller”机器人在不同车轮尺寸和速度下的能耗效率。实验结果显示,在平坦地面上行驶50m的距离时,机器人的CoT值随着速度的增加而降低,表明机器人在高速行驶时更加节能。然而,车轮变形电机在维持中间和较小车轮直径时需要消耗更多的能量,因此机器人的整体能耗效率受到了一定影响。这一发现为后续优化机器人的能耗管理提供了重要参考。
参考文章:
https://ieeexplore.ieee.org/document/10697322



