
海洋,作为地球上最为辽阔的自然资源之一,覆盖了地球表面约71%的面积。
也正因如此,人类长期以来一直致力于深入探索和了解这片神秘而广阔的蓝色领域。
水下机器人作为探索广阔水域的重要工具,显著降低了水下作业的风险与成本,正逐渐成为人类深入了解海洋环境的得力助手。
随着技术的不断进步,近年来水下机器人发展步伐明显加速,仿生设计的引入,更是为这一领域带来了革命性的变化。
尽管当前仿生水下机器人仍处于早期阶段,但相较于传统燃料驱动的水下机器人,仿生水下机器人不仅保持了高效的推进能力,还极大降低了噪音排放,有效减轻了对海洋生态环境的潜在干扰和影响。
▍创新章鱼机器人设计,降低结构复杂性实现高效游泳
以仿生机器人的典型例子章鱼为例,章鱼作为海洋动物中的智商担当,凭借其无骨骼的柔软身体、极高的运动自由度及惊人智慧,在游泳、伪装、探索与狩猎中展现出的超强能力,成为了仿生水下机器人研究的重要灵感源泉。
然而,尽管科研人员一直致力于在仿生水下机器人上复制章鱼的这些能力,但设计出具有八臂结构且能灵活游泳的仿生平台,其复杂性自项目之初便挑战非常。
在以往的研究中,虽然已经取得了一些成果,但仍存在一些缺陷和问题。例如,许多设计中,章鱼机器人的每只八爪臂都由单个电机驱动,这导致了电机数量的增加,从而增加了系统的复杂度和故障点,尤其在追求高度灵活性的应用场景下,故障发生的可能性将大大提升。又例如,目前的研究往往忽略了刚度特性的重要性。在做恢复和动力划水时,大多数游泳章鱼机器人具有相同的刚度,这可能会影响到机器人的性能和效率。此外,尽管有一些研究试图通过控制手臂上的SMA(形状记忆合金)来弯曲章鱼手臂以获得向前的推力,但实际控制仍然存在问题,现有软体机器人研究通常需要复杂的驱动和控制系统来实现刚度调节,这极大增加了设计和实现的难度。
针对以上问题,来自新加坡国立大学的研究人员进行了深入研究,并提出了一种与生物章鱼非常相似,可以将恢复划水和动力划水之间的时间比调整为 2.0:1,且仅使用两个电机便能实现可重复全程游泳过程的伞状结构,大大降低了驱动结构的复杂性。此外,研究团队还提出了一种可以在恢复和动力划水过程中被动地表现出不同的刚度,而无需任何额外控制的非对称章鱼臂,这一设计使得柔软的人造手臂能够紧密模仿生物章鱼手臂的游泳轨迹。
在以上成果的基础上,研究团队构建了一种仿生章鱼游泳机器人。该机器人采用柔性非对称刚度章鱼臂,并配备快速返回机构,可以自由调整恢复划水与动力划水的时间比,模拟出更加逼真的章鱼游泳姿态。
为了验证其性能,研究团队进行了实验评估验证。实验结果显示,采用70%切口的仿生章鱼臂在运动轨迹上与真实章鱼臂达到了高度一致。通过对不同机构之间的速度进行比较,研究团队证明了这种章鱼机器人具有出色的水下游泳能力。特别是当划水时间比设定为2.0:1(与生物章鱼相似)时,机器人在水槽中的游泳速度达到了峰值,其平均速度达到了110毫米/秒,而峰值速度更是飙升至314毫米/秒,展现出出色的水下推进性能。
该项目的成功不仅为生物学家和机器人专家提供了一个便捷、高效的实验平台,还以更低的成本为仿生机器人领域的发展做出了重要贡献,有望对水下机器人的未来设计与应用产生深远影响。
那么,该仿生章鱼游泳机器人具体是如何实现的呢?
接下来,和机器人大讲堂一起进行深入了解!
▍仿生章鱼游泳机器人的结构设计与组成
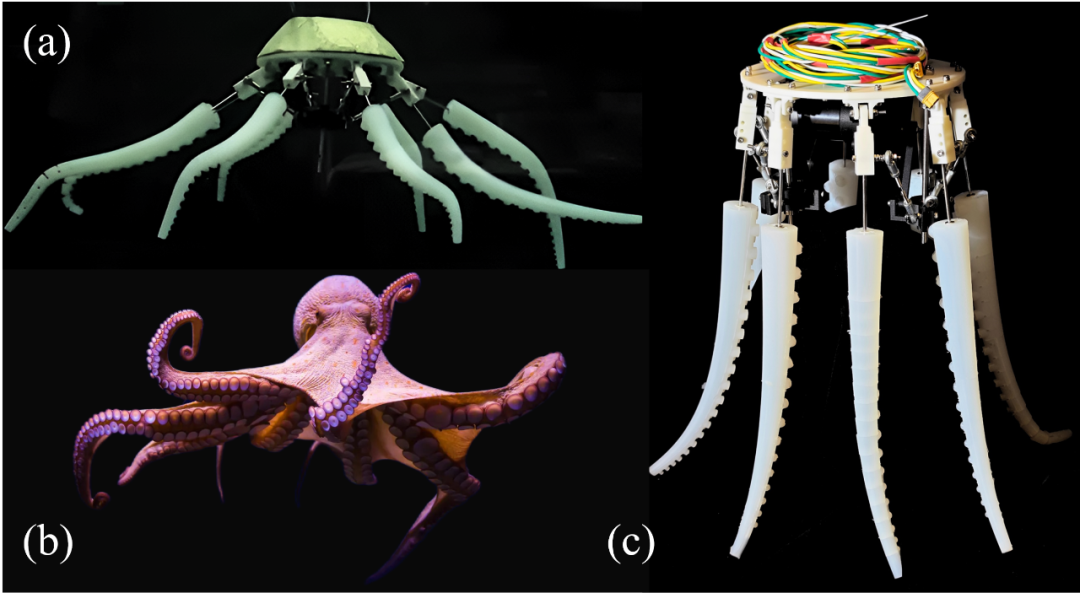
仿生章鱼游泳机器人由八条腿组成,每条腿均由Dragon Skin-30硅胶注塑而成,经过部分切割处理后,实现了不同的不对称弯曲刚度。伞状开合机构则由3D打印部件和两个电机组装而成,图1(b)至图1(d)展示了伞状结构的3D模型。
伞状结构
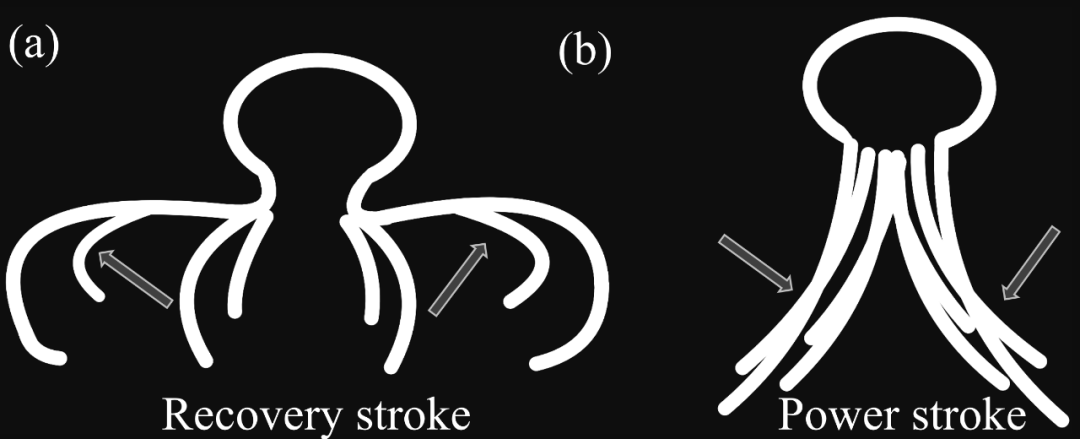
受到章鱼游泳时手臂张合动作与雨伞开合动作相似的启发,研究团队提出了一种类似雨伞的开合机构。研究团队设计了连杆来安装人造章鱼手臂,一端与章鱼机器人头部底盘相连,另一端通过支撑杆与滑块相连。为了模拟生物章鱼的时间比(恢复划水过程与动力划水过程的时间比约为2.0:1),设计中加入了工程中常见的偏置曲柄滑块机构。这种机构能够将滑块的往复运动转化为曲柄的旋转运动,从而实现对特定划水时间比的精确控制。四组连杆和支撑杆像半把雨伞一样组装在滑块上,以复制章鱼的四条游泳手臂。整个伞状机构由两组四只手臂组成,每组手臂由一个电机控制,使章鱼机器人能够执行一系列转弯动作。
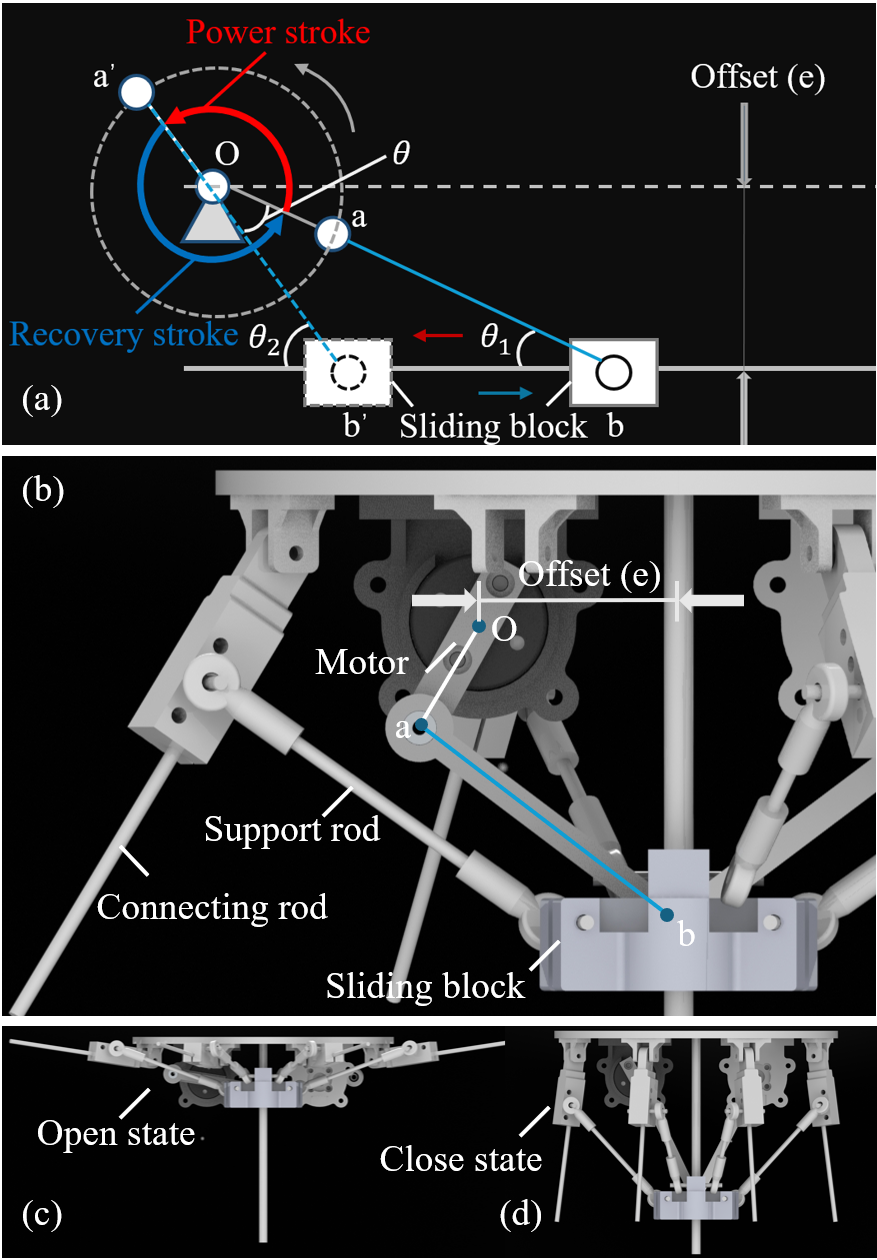
如上图(a)所示,偏置曲柄滑块机构主要由曲柄Oa、连杆ab、滑块b三部分组成。偏置表示滑块所在轨道与旋转中心O之间的距离。当曲柄Oa匀速旋转时,连杆ab作为从动杆,其另一端与滑块连接。通过调整Oa杆和ab杆的长度,可以控制动力冲程和恢复冲程过程之间的时间比。上图(c)和(d)展示了滑块上升以抬起连杆(连接到假肢)的过程,以及下降以放下连杆的过程。
非对称章鱼臂
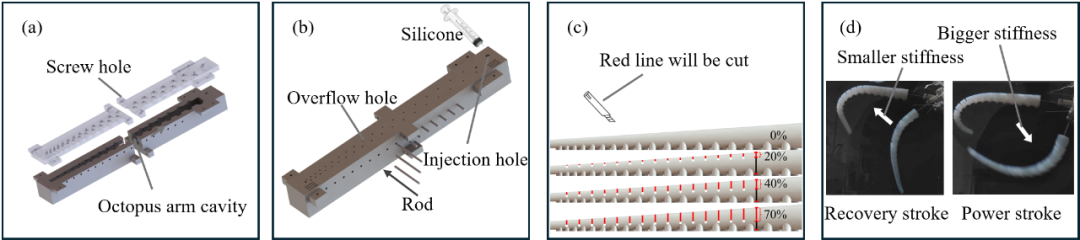
为了实现向上运动并减少不必要的推力,研究人员制造了具有不对称刚度的章鱼臂。这些手臂在恢复冲程期间由于较低的定向弯曲刚度而向上移动并被动向内弯曲,有助于进一步减少水阻力。而在动力冲程期间,手臂向下移动并略微被动弯曲,形成一条没有间隙的臂,以完整的章鱼臂弯曲刚度面对水阻力。通过设置不同深度的切口,研究团队发现切口深度为40%的人造臂轨迹与生物章鱼臂最为相似。
此外,为了模拟章鱼在水中游动的现象,研究团队在整个机构上添加了漂浮块,使得整个机构在水中能呈现中性浮力。这一设计不仅提高了章鱼机器人的游泳效率,还增强了其在复杂环境中的适应能力。
▍仿生章鱼游泳机器人的性能实验与评估
不同不对称性的单臂游泳行为
测试中,研究团队发现,通过在机器章鱼手臂上引入非对称结构,可以显著改善其运动轨迹。为了深入探究这一现象,研究人员制作了不同切割深度的章鱼手臂,分别为0%、20%、40%和70%。在电机转速为48转/分的条件下,所有实验均进行了实验测试,并进行了单只章鱼臂在水中的运动轨迹捕捉。
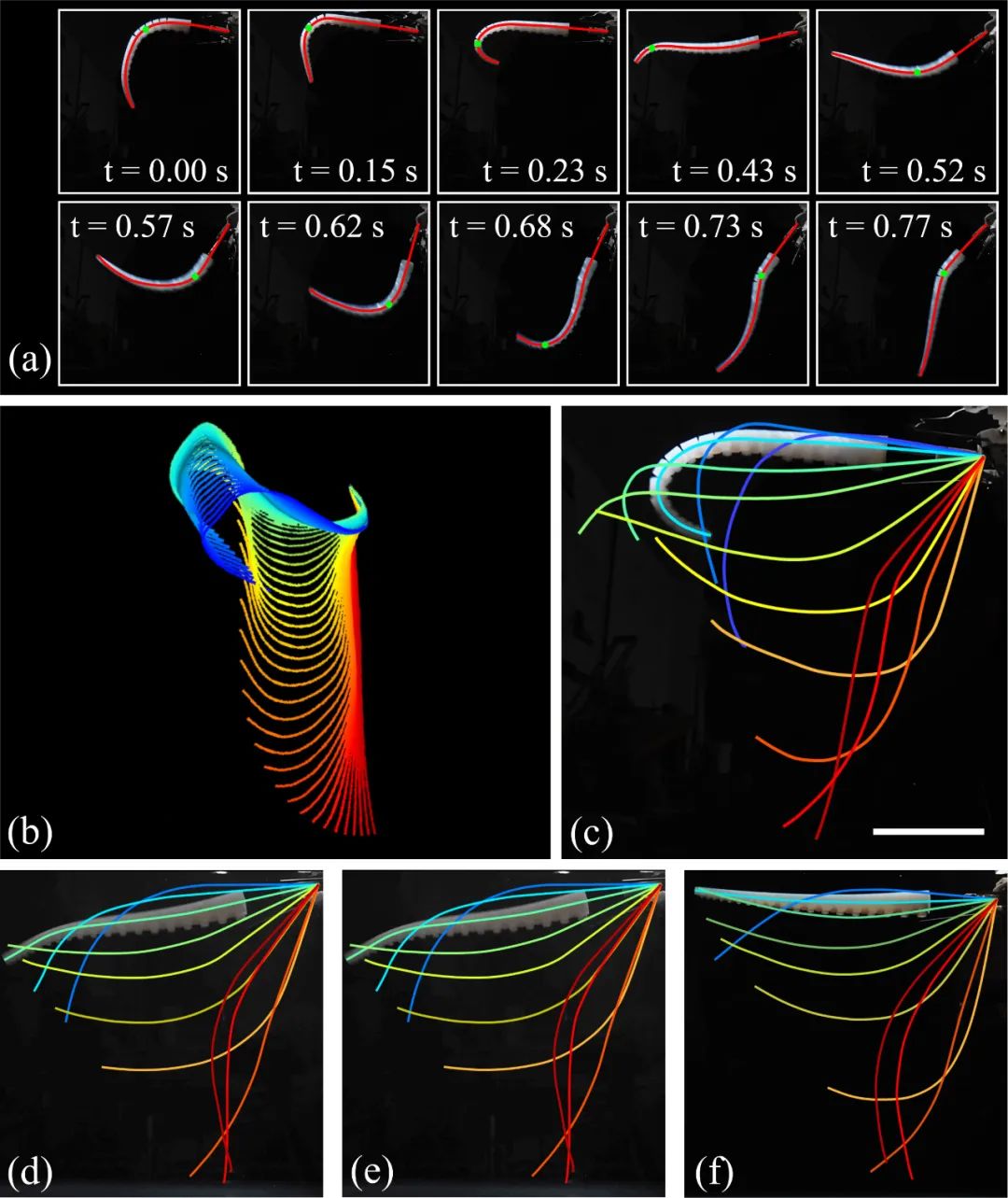
对于每个非对称章鱼臂,研究人员提取了与章鱼手臂轨迹数据相对应的10条轨迹,并通过不同时刻的抓拍,分析了切割深度为70%的手臂的整体运动特性。最大曲率点首先向上移动并远离手臂基座(靠近驱动端,在图片的右侧),在t = 0.23秒之前的初始阶段,曲率逐渐增大。当手臂达到最高点并变为水平时,弯曲度逐渐减小。随后,在向下推水时,最大曲率点的曲率相对较小。最大曲率点也从手臂基座转移到手臂尖端(远离驱动端,在图片的左侧),但此时的弯曲度是向下的。在t = 0.73秒时,手臂到达机构的最低点并开始向上运动。在t = 0.73秒和t = 0.77秒之间,最大曲率方向发生反转。此外,随着接近运动周期的结束,最大曲率值变小。
实验表明,只有切割深度为70%的人工手臂在t = 0.23秒时在手臂远端出现了类似生物的曲率。如上图所示,该曲率比t = 0.68秒时的曲率更明显。这表明,不对称设计在与水的被动相互作用中起着重要作用,将对水下游泳推进产生积极影响。相比之下,切割深度为40%、20%和0%的人工手臂的运动轨迹与生物章鱼手臂的运动轨迹有显著不同。由于70%切割长度的手臂与生物章鱼手臂具有良好的相似性,因此在接下来的游泳实验中,研究团队采用了这一比例。
不同划水比的机器人游泳性能
为了研究划水时间比如何影响章鱼的游泳效率,研究人员制造了划水时间比为2.0:1(与生物章鱼的划水时间比相匹配)、1.6:1和1.2:1的快速返回机构来评估其影响。实验在一个1.5米立方水箱中进行,水深1.3米。实验是在电机两侧以33 rpm的恒定电机速度进行的。结果显示,章鱼机器人在划水时间比为2.0:1时游得最快。下图展示了在此比率下的游泳性能。
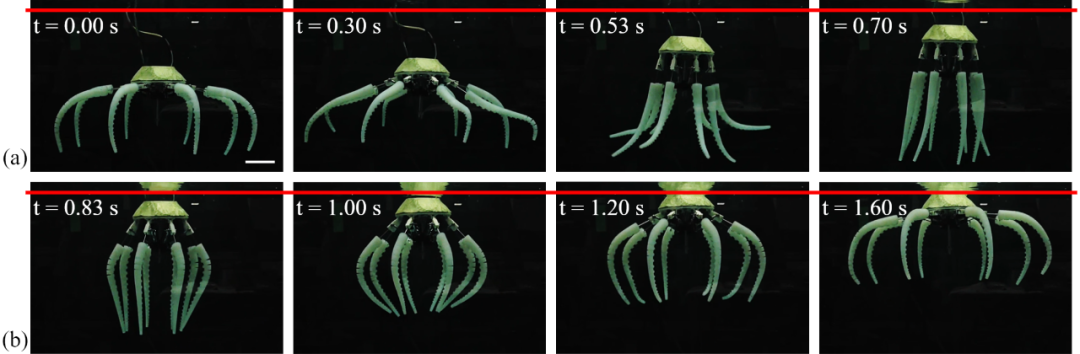
研究人员测量并跟踪了章鱼机器人的运动距离,并对其进行微分以获得速度与时间的函数关系。实验结果如下图所示。下图表明,在划水时间比为2.0:1时,章鱼的游泳速度比1.6:1时更快。此外,2.0:1的比例与真正的章鱼非常相似,其游泳速度完全为正,表明章鱼没有向后游动。而在1.6:1和1.2:1两种情况下,章鱼都是向后游动的。在实验过程中,尽管重复性良好,但划水时间比为1.2:1的章鱼机器人的运动周期与其他两个不同。这是不正常的。经过分析,研究人员得出结论,这是因为在这种情况下电机严重过载。

参考文章:https://arxiv.org/html/2410.11764v1



