
软体机器人,通常由具有类似皮肤和肌肉组织柔韧性和顺应性的材料构成,可通过形变有效吸收碰撞中释放的大部分能量,展现出超强的适应性、灵敏度和敏捷性。
凭借其材料模量与人体自然组织高度兼容的天然优势,软体机器人尤其适用于可穿戴和植入式应用。
然而,要充分挖掘其潜能,必须实现传感、驱动、控制、能源供应及通信等核心组件的无缝集成。
▍开发更先进可穿戴与植入式软体机器人,难点有哪些?
对于可穿戴和植入式软体机器人,设备的尺寸与侵入程度往往是设计的关键。
一般而言,较小的尺寸可以带来更好的便携性,但同时也对设计、制造、控制提出了更高的复杂性要求,并受到能源供应的限制。
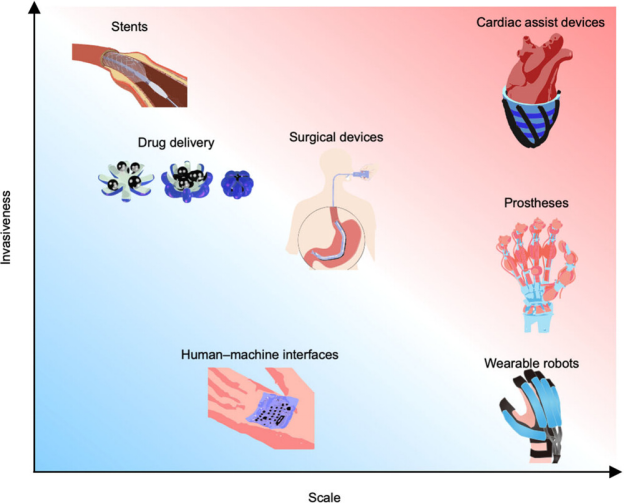
图1 不同类型的可穿戴和植入式软体机器人在规模和侵入性方面的差异比较
降低侵入性,可以提升用户的舒适度,并减轻手术等应用的复杂度和潜在风险,但对设备的小型化及材料的生物相容性提出了更高要求。
因此,更先进可穿戴与植入式软体机器人的开发,在很大程度上依赖于设计、制造、控制、电源和材料等方面的创新。
那么,当前这一领域的具体进展如何呢?
近日,来自加州理工学院高伟教授课题组的研究人员就可穿戴和植入式软体机器人的最新发展进行了深入研究。
聚焦于康复、辅助、器官模拟、手术辅助及治疗等多元化应用领域,该研究团队不仅深入讨论了当前软体机器人行业面临的复杂制造工艺、响应性材料集成以及稳健控制策略的需求等挑战,还重点介绍了材料科学、驱动与感知机制以及制造技术的最新进展。此外,他们还展望了软体机器人在医疗健康领域的广阔前景,剖析了关键挑战,并提出了潜在解决方案。
图2 论文发表相关信息
该研究的相关论文成果已以“《可穿戴和植入式软体机器人》(Wearable and Implantable Soft Robots)”为题发表在美国化学学会(ACS)旗下的《Chemical Reviews》期刊上。论文第一作者为加州理工学院博士生银树焜和Dickson Richard Yao,通讯作者为加州理工学院医学工程系教授高伟。
▍软体机器人技术综述:驱动机制、材料与制造技术的最新进展
从微创手术的精确微运动到康复设备的强力处理,执行器作为软体机器人的核心,能够助力其实现多种功能。
合适的执行器对于软体机器人的制造复杂性、传感精度、控制精度等多个方面具有重要影响。
文章中,该研究团队对软体机器人的驱动机制、关键材料以及先进制造技术进行了全面的综合研究,并详细介绍了其运行原理、优势和局限性。
驱动机制
软体机器人的驱动机制是其实现复杂运动和功能的核心。目前,多种驱动机制已被开发并应用于软体机器人中,包括但不限于气动/液压弹性体、磁性弹性体、牵引线驱动、介电弹性体、液晶弹性体、形状记忆聚合物和凝胶等。
这些驱动机制各有特色,如气动/液压弹性体以其简单性和产生巨大力量的能力著称,而磁性弹性体则能实现远程和精确控制。牵引线驱动系统则模仿生物体的自然运动机制,具有高抗拉强度和轻质结构的特点。介电弹性体响应电刺激快速变形,而液晶弹性体则对温度和光等刺激敏感,展现出可逆、可控的驱动特性。形状记忆聚合物和凝胶则分别通过外部刺激和自身特性实现形状变化和驱动。
关键材料
软体机器人的材料选择对其性能具有决定性影响。理想的软体机器人材料应具备高灵活性、高强度和耐用性,同时保持良好的生物相容性。目前,硅树脂、聚氨酯和水凝胶等材料因其独特的机械性能和适用场景而被广泛应用于软体机器人中。硅树脂以其出色的机械性能和耐用性成为气动/液压和介电弹性体执行器的首选材料;聚氨酯则因其高抗拉强度和耐磨性在更强大的应用场景中表现出色;水凝胶则因其高含水量和生物相容性在生物医学应用中展现出巨大潜力。
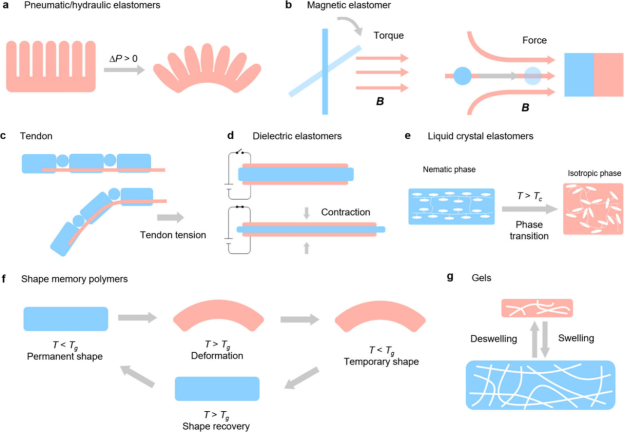
图3 按材料类型分类的软体机器人驱动机制
制造技术
制造技术的进步对软体机器人的发展至关重要。传统制造工艺难以满足软体机器人对高空间分辨率和复杂材料排列的需求,因此减材制造、成型制造和增材制造等技术应运而生。其中,3D打印技术以其按需数字化制造复杂结构的能力,在软体机器人制造中展现出巨大优势。多材料3D打印技术更是通过高空间和成分精度集成不同材料,增强了打印对象的复杂性和功能性。这些先进的制造技术为软体机器人的发展提供了有力支撑。
最新进展
尽管软体机器人在多个领域展现出巨大潜力,但其发展仍面临诸多挑战。例如,如何进一步提高软体机器人的驱动效率、响应速度和稳定性;如何开发更具生物相容性和耐用性的新材料;以及如何优化制造工艺以降低成本并提高生产效率等。
▍软体机器人感知方法:外部传感、本体传感与多模态融合
软体机器人作为新兴技术,其感知能力的提升对于实现更高级的功能至关重要。由于软体机器人的顺应性和形态特点,传统传感器如编码器、金属或半导体应变计及惯性测量单元(IMU)难以直接应用。因此,开发适应软体机器人特性的感知方法成为研究热点。
文章中,该研究团队对外部传感和本体传感、温度传感、生物化学传感、电生理传感以及多模态传感等几种常用的软体机器人感知方法进行了分析介绍。
外部传感与本体传感
外部传感和本体传感是软体机器人感知环境及自身状态的重要手段。外部传感器收集环境信息,如压力、应变和温度,而本体传感器则监测机器人内部的变形情况。这些传感器与执行器协同工作,使机器人能够智能地解释环境刺激并调节其动态,实现快速响应和精确任务执行。例如,集成触觉传感器的软体手套能够分解复杂的抓握特征,为机器人提供触觉感知能力,进而增强其抓握和操纵能力。
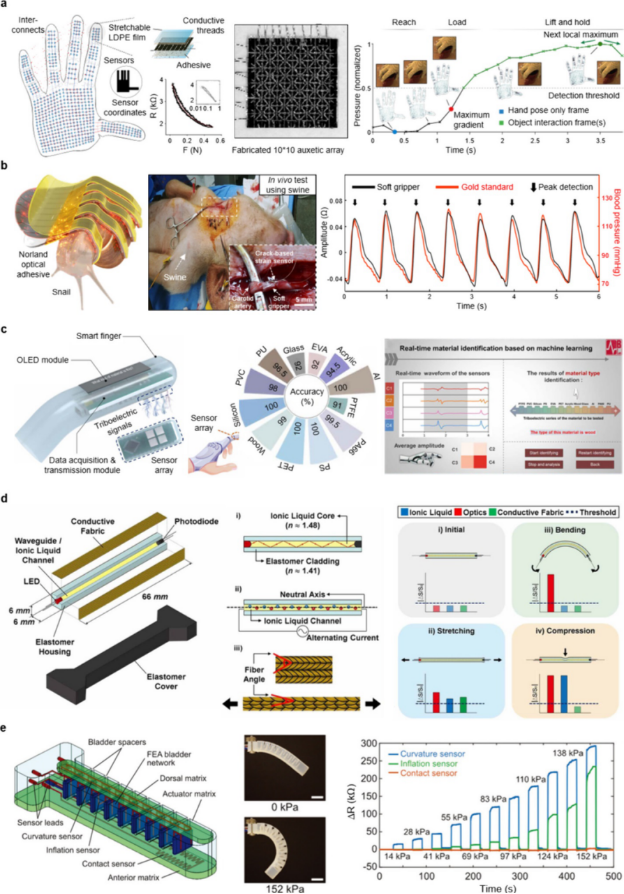
图4 软体机器人的外部传感和本体传感
温度传感
温度传感在软体机器人技术中扮演着关键角色,它使机器人能够精确控制、监测环境变化并增强安全性。通过采用热电偶、电阻温度检测器和红外传感器等技术,软体机器人能够准确测量周围环境和自身结构内的温度变化。这些传感器需具备高灵敏度、快速响应和长期稳定性,以适应软体机器人表面的各种运动和变形。温度传感在医疗诊断、环境监测和工业自动化等领域展现出广阔的应用前景。
生化传感
生化传感能够提升软体机器人的感觉、诊断和治疗功能,通过感知化学信息并与之互动,为软体机器人带来革命性变化。例如,利用工程细菌开发的软体机器人夹持器能够实时检测和反馈环境中的化学物质,为环境监测和污染检测提供新途径。此外,模仿人类味觉和嗅觉的生化传感技术也在不断发展,为食品质量控制和机器人决策提供了有力支持。
电生理传感
电生理传感使软体机器人能够通过利用和解释电信号与人体和环境建立联系,可用于进一步探索医疗保健和康复等领域的生物医学应用。例如,可穿戴EEG纹身电子设备能够实时增强大脑-AI闭环系统的机器决策能力,而3D打印的折纸干电极则无需导电凝胶或粘合剂即可实现心电图监测。这些技术为机器人提供了更自然、直观的交互方式,增强了其在医疗和人机协作中的能力。
多模态传感
多模态传感将不同的传感模块集成到软体机器人平台中,实现了对多种环境刺激的同步感知和综合分析。例如,集成触觉、温度和压力传感器的可拉伸假肢皮肤能够为使用者提供高度局部的机械和热皮肤样感知,而具有全打印多模态传感功能的软体电子皮肤则可用于电生理记录、触觉感知和危险物质检测。多模态传感技术为软体机器人提供了更全面的感知能力,使其在复杂环境中表现出更高的智能和适应性。
目前,软体机器人的感知方法正朝着多元化、集成化和智能化的方向发展。通过外部传感、本体传感、温度传感、生物化学传感和电生理传感等多种手段的综合运用,软体机器人将能够更准确地感知环境变化和自身状态,实现更高级的功能和更广泛的应用。
▍软体机器人在医疗健康领域的未来展望与挑战
软体机器人在医疗健康领域的未来发展充满机遇,但也伴随着挑战。目前软体机器人在医疗健康领域正经历着变革性进步,但同时也面临着一系列挑战。
驱动机制、材料与制造技术的创新
未来,软体机器人的驱动机制将更加高效和多功能,生物混合致动器等创新技术将融合活体组织与非生物材料,创造出适应性更强、反应更灵敏的系统。
同时,新型执行器的开发将提高运动控制的精确性和效率。
在材料方面,兼具灵活性、强度、生物相容性和环境响应性的新兴材料将为软体机器人与生物组织的无缝交互提供可能。液晶弹性体和水凝胶等材料的进步将显著提升软体机器人的变形能力和环境适应性。
此外,先进的制造技术如3D打印、软光刻和卷对卷处理将推动软体机器人的规模化生产,并保持其精度和可重复性。
软体机器人的智能化发展
软体机器人的智能化是其未来发展的关键方向。
未来的软体机器人将具备多功能性和可重构性,能够自主运行、处理不可预测的情况并执行复杂任务。集成传感器阵列和高分辨率传感器将提高软体机器人的感知能力,使其能够实时监测生理参数并响应环境变化。
同时,机器学习和神经网络的应用将使软体机器人具备实时决策和自适应控制能力。具身人工智能的原则将指导软体机器人系统的设计,使其能够在动态和复杂环境中实现生物启发的人工智能。
能源与可持续性挑战
能源效率与可持续性是软体机器人长期运行的关键挑战。
未来研究将致力于开发高效、轻便、紧凑的电源解决方案,如生物燃料电池和柔性电池,以提供持续电力并保持软体机器人的灵活性和生物相容性。
同时,提高执行器和传感器的能源效率将延长软体机器人的使用寿命并减少对外部电源的依赖。此外,开发可持续材料以减少对环境的影响也是未来研究的重要方向。
参考文章
https://pubs.acs.org/doi/10.1021/acs.chemrev.4c00513



