
软机器人相比传统刚性机器人具有显著优势,其柔性和适应性使其能够执行各种复杂任务。但软机器人的制造和集成过程却是一项复杂的任务,目前,软机器人的制造大多依赖于手工组装,这不仅增加了制造时间,还降低了制造的一致性,尤其是在小型化软机器人的设计方案上尤为明显。此外,软机器人的非线性、滞后和粘弹性行为也使其建模和控制变得更为复杂。
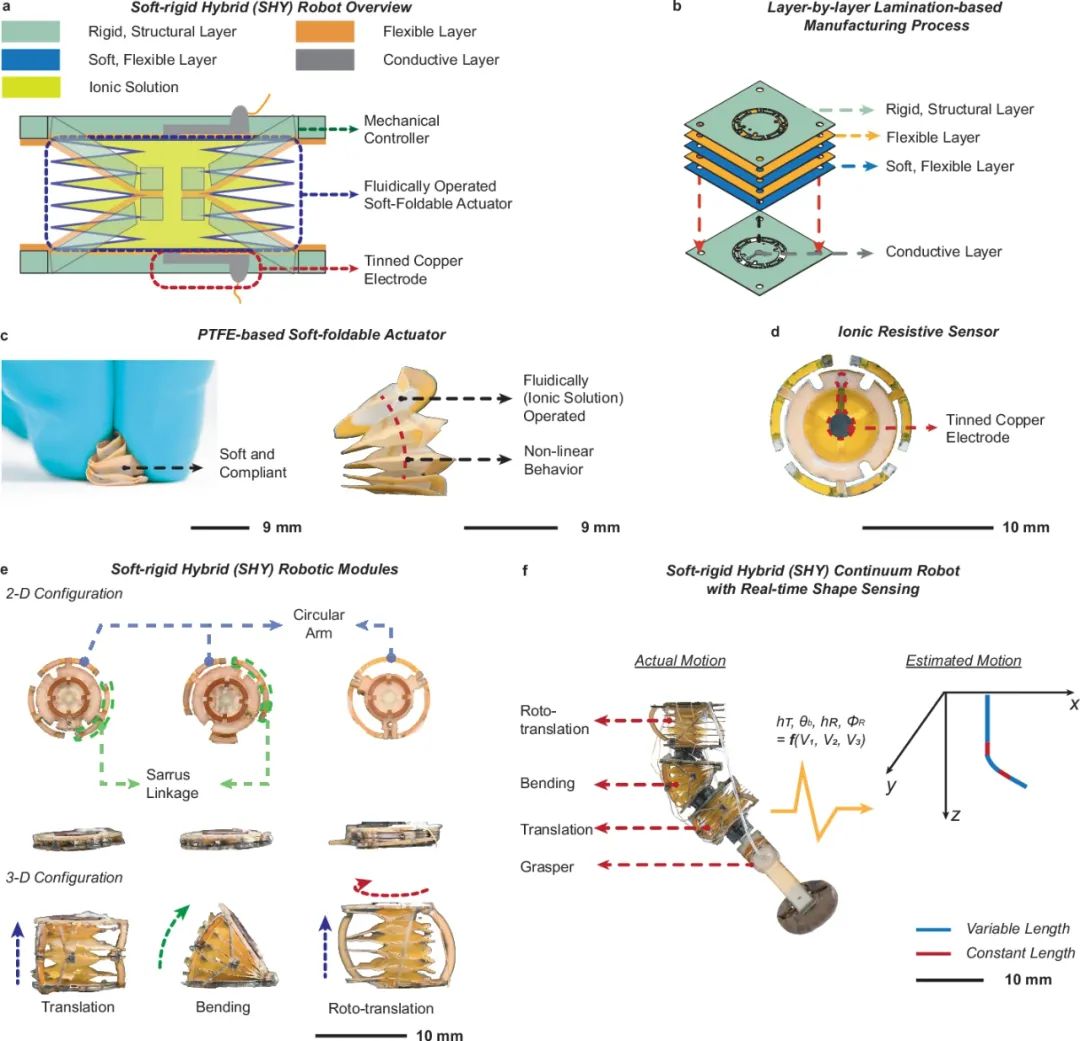
SHY机器人结构图一览
为了解决软机器人在设计过程中的难题,近日波士顿大学的研究团队在《Nature Communications》上发表了一项创新研究,提出了一种可扩展的单片式制造方法,用于制造毫米级软刚混合(SHY)机器人,该方法简化了核心硬件组件的集成,并展示了机器人在物体抓取、针头引导和光纤引导等任务中的应用潜力。
▍软刚混合机器人材料选择与设计方案
在材料的选择与设计方面,波士顿大学的研究团队表示,该团队设计的软刚混合机器人(Soft-Rigid Hybrid Robots,简称SHY机器人)采用了多种不同性质的材料,包括刚性材料(如纤维增强环氧树脂层压板)、柔性材料(如聚酰亚胺薄膜)、软性材料(如聚四氟乙烯,PTFE)和导电材料(如铜薄膜),并通过光精密微加工和氢(H₂)等离子体表面改性技术进行预处理,方便后续粘合。
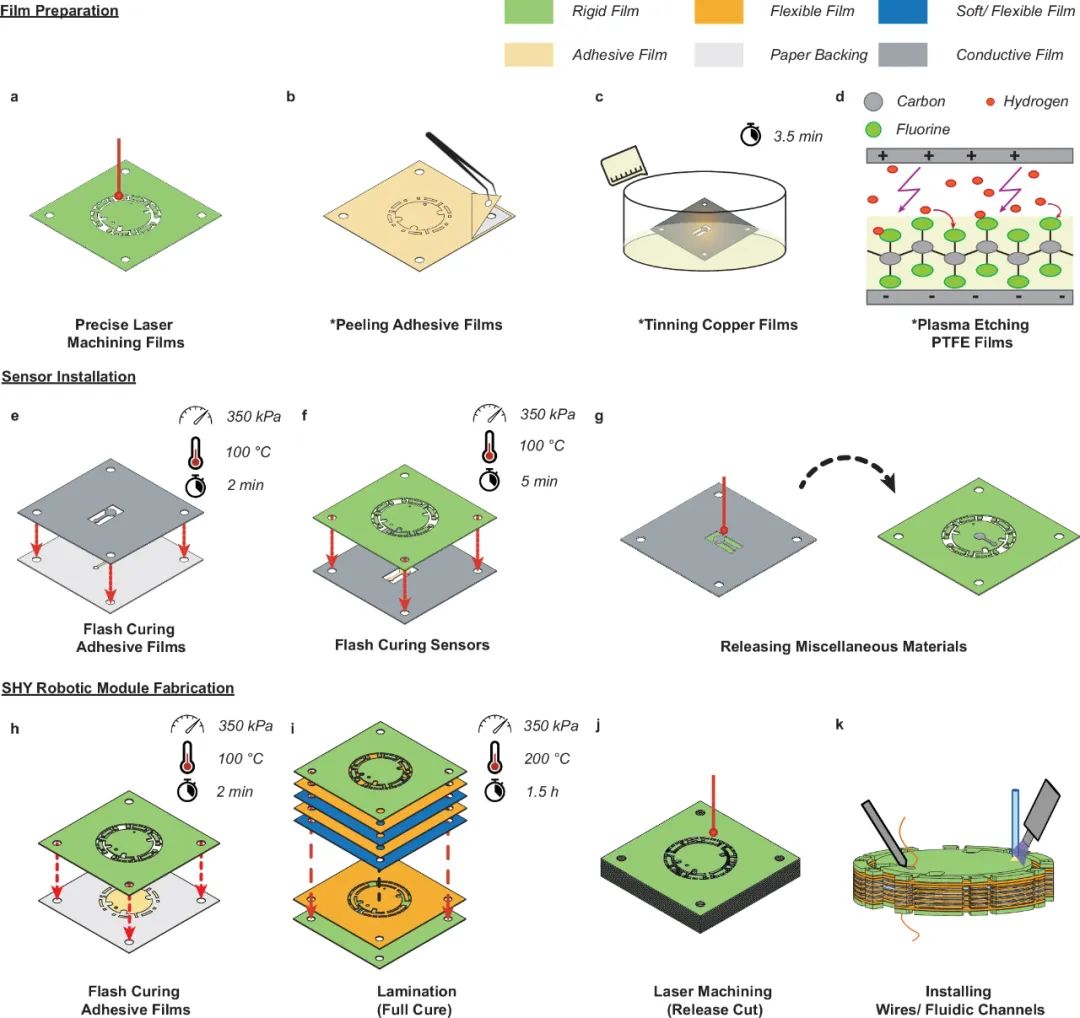
SHY机器人的制造过程
在制作上,研究团队首先采用二极管泵浦固体激光器对各种薄膜材料进行精确切割,形成所需的形状和尺寸。之后对PTFE薄膜进行H₂等离子体处理,以改变其化学性质,增加其亲水性,从而使其能够与粘合剂薄膜有效粘合。这一过程通过氢自由基与氟原子结合,形成氢氟酸,导致PTFE表面性质的变化。
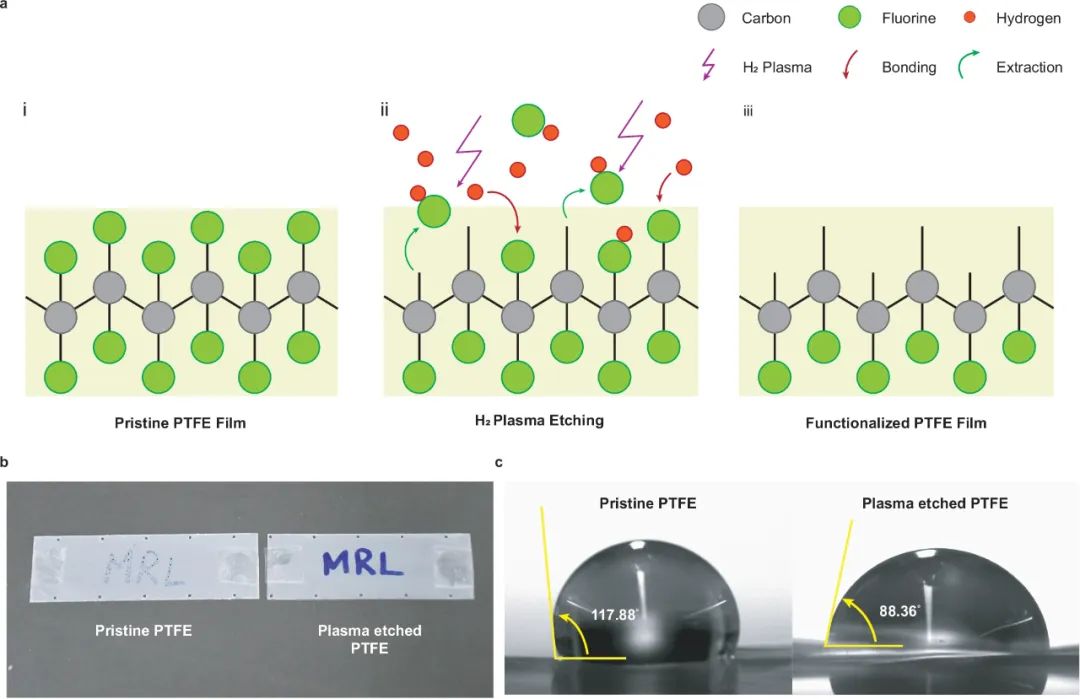
使用氢等离子体改变PTFE薄膜的特性
研究人员表示,单片集成制造方法的核心在于通过层叠技术将各种材料无缝结合,形成完整的机器人结构。在粘合过程当中,研究人员通过激光加工去除粘合剂薄膜的部分背纸,以便在特定位置进行粘合。
之后将导电铜薄膜镀锡以防止腐蚀,并通过热压将其暂时固定到结构层上。接着,将所有粘合剂薄膜转移到其他薄膜上,并对齐堆叠,通过高温高压进行永久粘合。
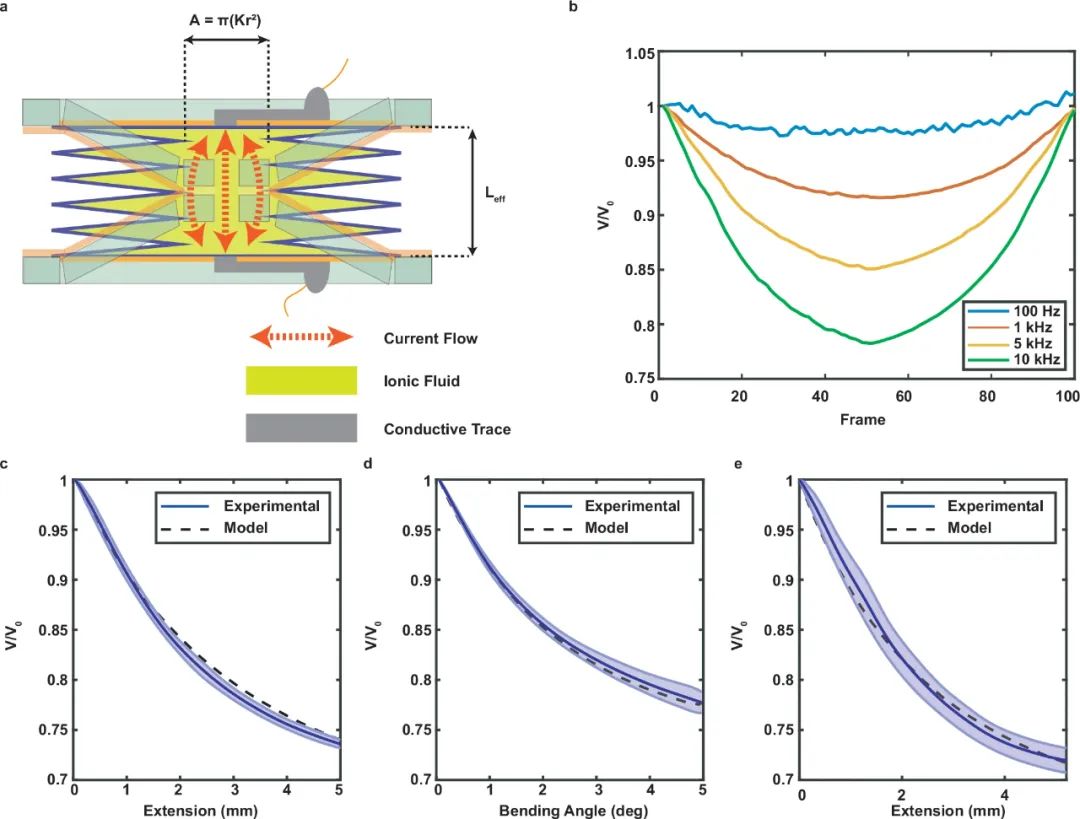
SHY机器人传感器建模和特性
在制造过程中,研究人员通过嵌入铜电极并在机器人内部形成电路,实现了离子电阻传感器的集成。该传感器能够检测机器人体内的电阻变化,从而能够实时感知机器人的运动状态。
SHY机器人模块的机械特性
值得一提的是,SHY机器人的驱动器由一系列基于PTFE薄膜的气囊组成,这些气囊在充气后能够像气球一样膨胀,并根据外部力产生简单的线性运动。
通过预先设计的刚性连杆和柔性关节对软折叠驱动器进行约束,SHY机器人能够实现可控的运动。同时,通过在机器人内部嵌入离子电阻传感器,机器人能够自我感知其运动状态,并通过测量电阻变化来估计机器人的构型。
▍三大场景实测SHY机器人复杂任务执行能力
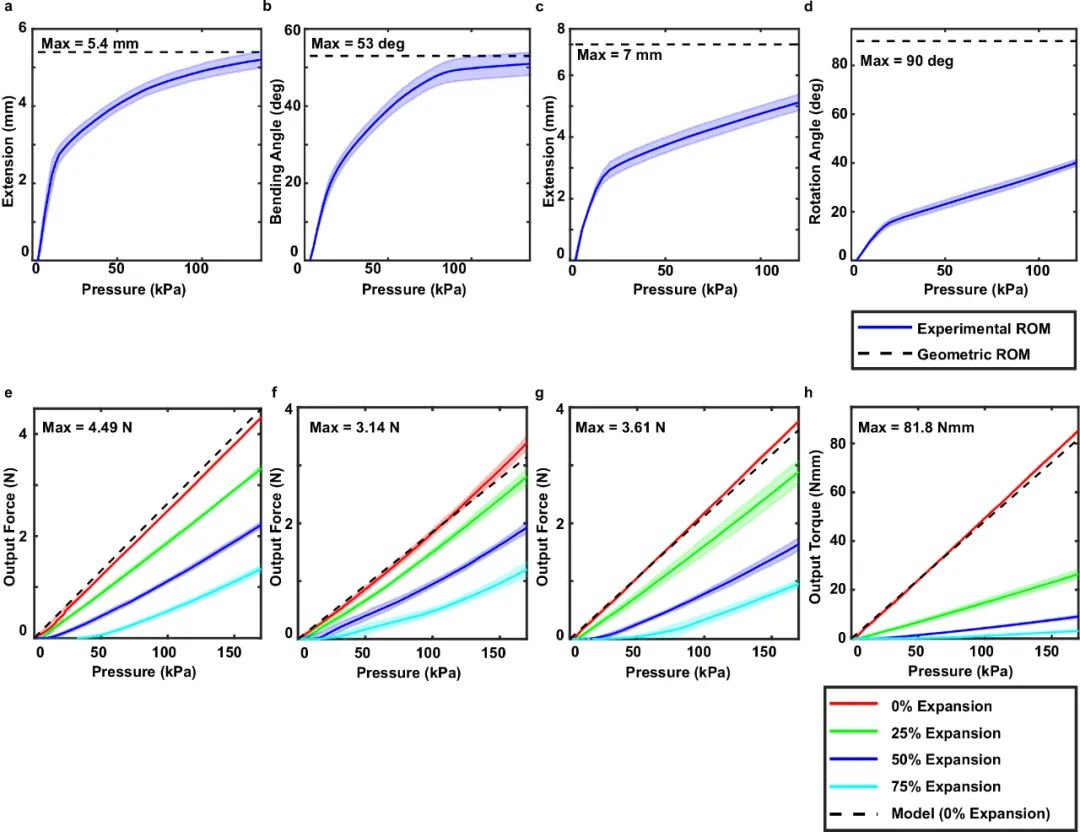
为了验证SHY机器人在实际场景中的有效性,研究团队对SHY机器人模块进行了机械性能表征测试。其中包括运动范围、力和扭矩、功率密度和疲劳测试。结果表明,这些机器人模块在不同的扩展状态下均能产生显著的输出力和扭矩,并且具有较高的功率密度。
实际测试场景下,研究团队构建了一个SHY体机器人,并集成了各种末端执行器,如机械手爪、针头和光纤。通过执行物体抓取与放置、针头引导和光纤引导等任务。
SHY机械手执行拾取和放置任务
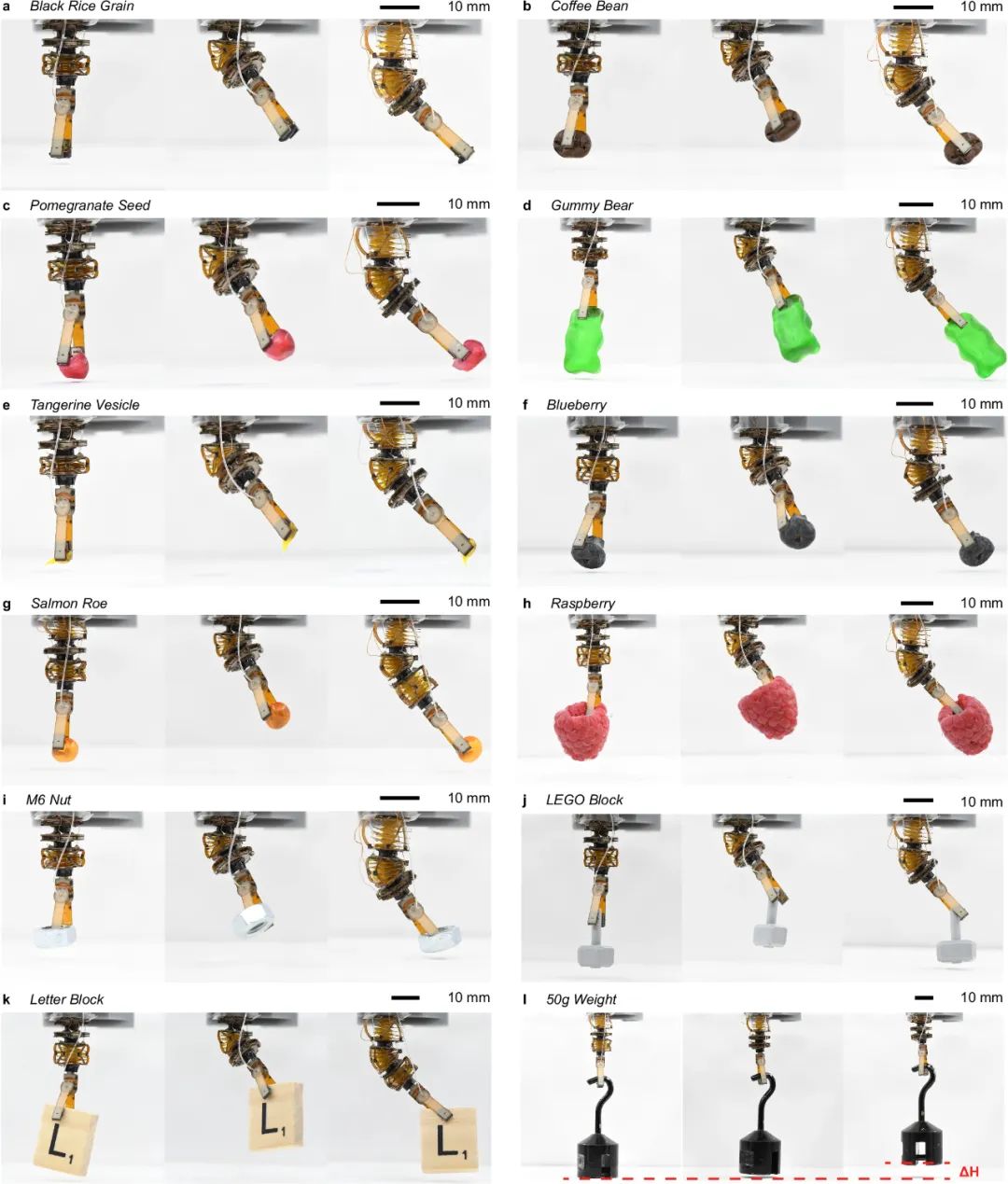
在物体抓取与放置任务中,SHY机器人的末端集成了一个使用相同制造技术制造的机器人抓取器。抓取器由嵌入式聚四氟乙烯(PTFE)软折叠致动器驱动,通过施加正压和负压来实现钳口的打开和闭合。而测试对象则包括小型食品颗粒(如黑米粒、咖啡豆、石榴籽、软糖)、装配和制造组件(如M6螺母、乐高积木)、日常物品(如字母积木、乐高积木)以及一个50克的重量的物体组件。
实验结果显示,SHY机器人成功抓取并移动了所有测试物体,包括比抓取器本身还大的物体(如字母积木)和比机器人自身重25倍的物体(如50克重量)。此外在抓取和移动柔软易碎的食品项目(如橘子囊泡、蓝莓、鲑鱼卵和覆盆子)时,机器人没有损坏任何物体。
SHY机器人执行针和光纤操纵任务
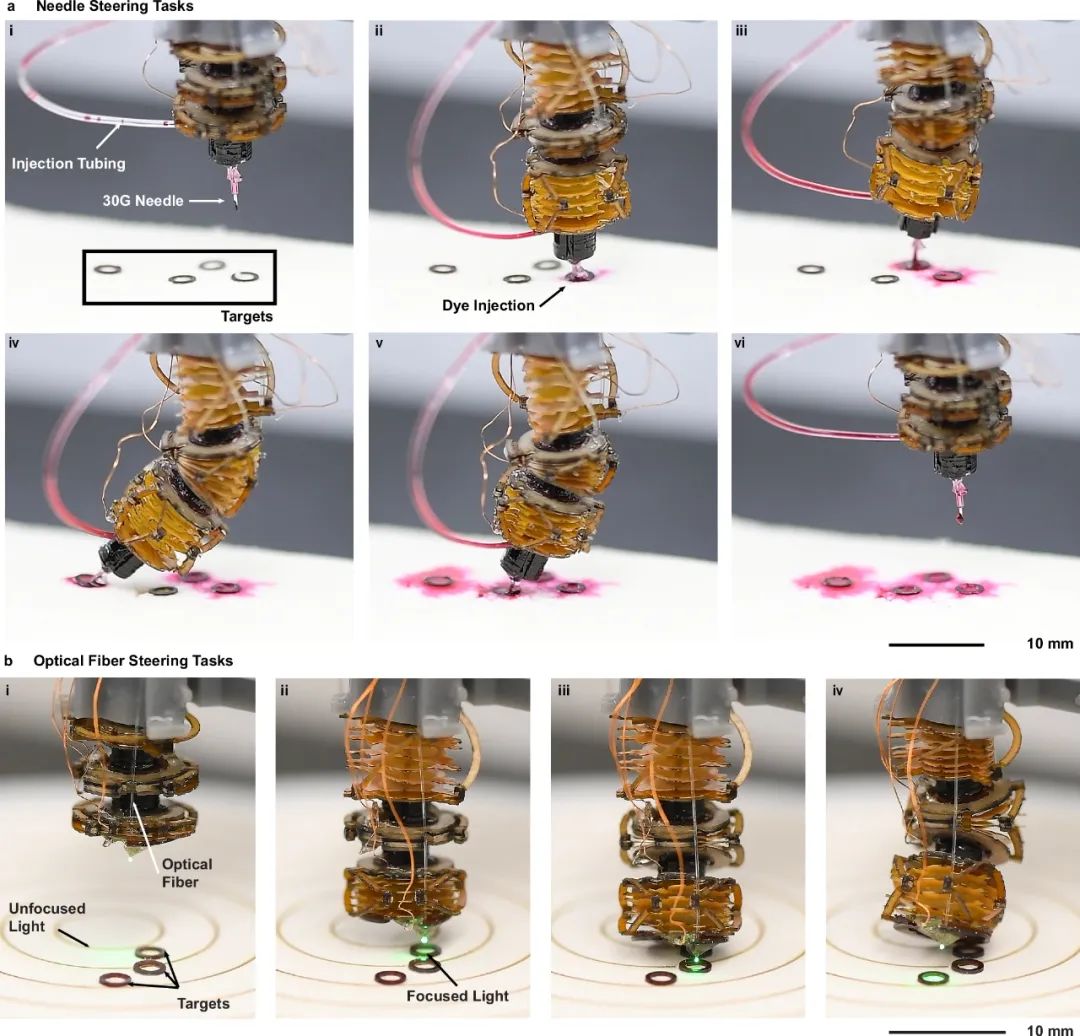
为了模拟医疗活检和药物输送程序,研究团队展示了SHY机器人在针头引导任务中的应用。通过在SHY机器人的末端集成了一个30号针头和内径为304微米的微管,让SHY机器人前往四个提前标记好的目标位置。整个实验过程利用开环控制,机器人朝向每个目标位置导航,根据需要引导针头末端,将针头插入组织模拟物中,并进行穿刺,然后注射粉红色染料以验证穿刺过程。
实验结果显示,SHY机器人能够施加足够的力穿透组织模拟器,注射粉红色染料的过程验证了其穿刺能力。这种能力未来能够有效应用到如微创手术中的组织活检和药物输送任务当中。
此外,研究人员也展示了SHY机器人在医疗程序中的潜在应用(如激光消融)能力,通过使用绿色LED光模拟激光,将SHY机器人倒置并朝向目标位置移动。由于激光在离开光纤时会发散,因此需要将光纤更靠近目标位置以实现聚焦和高功率光输送。在移动过程中关闭LED光,一旦SHY机器人成功对准光纤与目标,就重新激活LED光。
实验结果显示,随着SHY机器人光纤接近目标位置,光斑直径减小,表明聚焦增强。研究人员表示,SHY机器人表现出的这种能力在激光辅助手术中具有重要意义,其中对光纤位置的精确控制对于成功输送聚焦激光和无血组织消融至关重要。
▍结语与未来:
波士顿大学SHY机器人为毫米级软刚混合机器人的制造和应用提供了新的思路和方法。该方法实现了传感器与SHY机器人的无缝集成,使得机器人能够在不同自由度下工作。相比其他方法,该方法在传感器集成方面更为灵活和可靠,且适用于多种设计和尺寸的SHY机器人。
值得一提的是,该方法支持批量制造,能够在单个制造会话中同时构建多个模块,能够提高制造效率和一致性,同时在机械性能方面表现出色,具有与其他流体驱动软机器人相当或更优的性能。
研究人员表示,SHY机器人未来仍有改进空间,为了减少系统复杂性,未来可以尝试通过引入震动阀和流体逻辑来减少管路数量。此外,随着机器人工作空间的扩展,相对误差也会增加,这主要是由于离子电阻传感器的非线性行为所致。未来SHY机器人可以尝试通过优化驱动器尺寸和形状来改进传感器的灵敏度。



