
很多四足机器人已经征服了崎岖地形,但它们能否攻克工业环境中最普遍的垂直挑战——梯子?
最近,瑞士苏黎世联邦理工学院(ETH Zurich)的研究团队在这一领域取得了显著进展。他们开发的四足机器人不仅能够攀爬不同倾角的梯子,还展现出了相对较快的攀爬速度和良好的稳定性。这一进展为四足机器人在工业应用中的能力拓展开辟了新的可能。
让我们一起深入了解这项研究的关键内容。
▍巧妙设计的钩爪让攀爬成为可能
要让四足机器人攀爬梯子,首先要解决的就是抓握问题。传统的四足机器人通常采用球形或平面状的脚掌设计,这种设计虽然适合在普通地形行走,但无法在梯子上产生足够的锚定力。
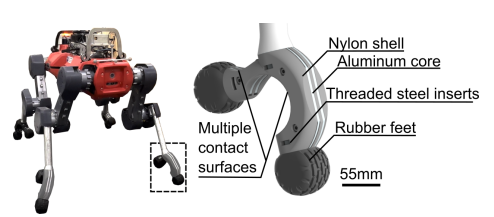
研究团队巧妙地设计了一种钩状末端执行器,替代了常规的脚掌。这个钩爪由铝制核心和3D打印外壳组成,内部有一个凹面结构,可以稳定地卡在圆形横档上。同时,钩爪还有突出部分,可以推拉横档,产生向上攀爬所需的力。
这种设计在仿真环境中被进行了严格的测试。研究人员使用RaiSim物理引擎构建了高度逼真的仿真环境,特别关注了接触动力学和摩擦建模。他们采用软接触模型来模拟钩爪与横档的接触过程,考虑了材料的弹性和阻尼特性。同时,他们还使用了各向异性摩擦模型,以反映钩爪在不同方向上的摩擦特性差异。这些细节的考虑大大提高了仿真的真实性,为后续的实物测试奠定了坚实的基础。
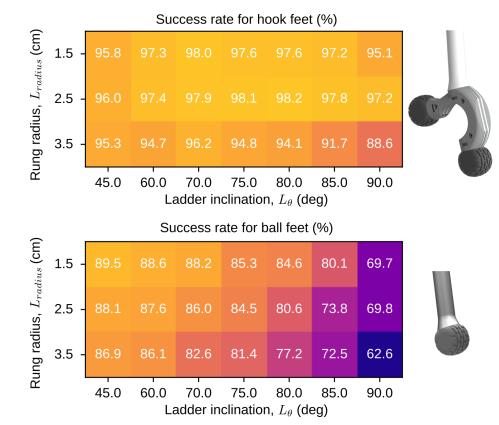
有趣的是,研究人员在仿真测试中发现,即使是普通的球形脚掌,在某些情况下也能完成攀爬任务。但钩爪设计在面对不确定因素时表现出明显优势,为现实世界中的稳定攀爬奠定了基础。
▍强化学习:让机器人学会灵活攀爬
有了合适的钩爪,下一步就是让机器人学会如何攀爬。研究团队采用了强化学习的方法。
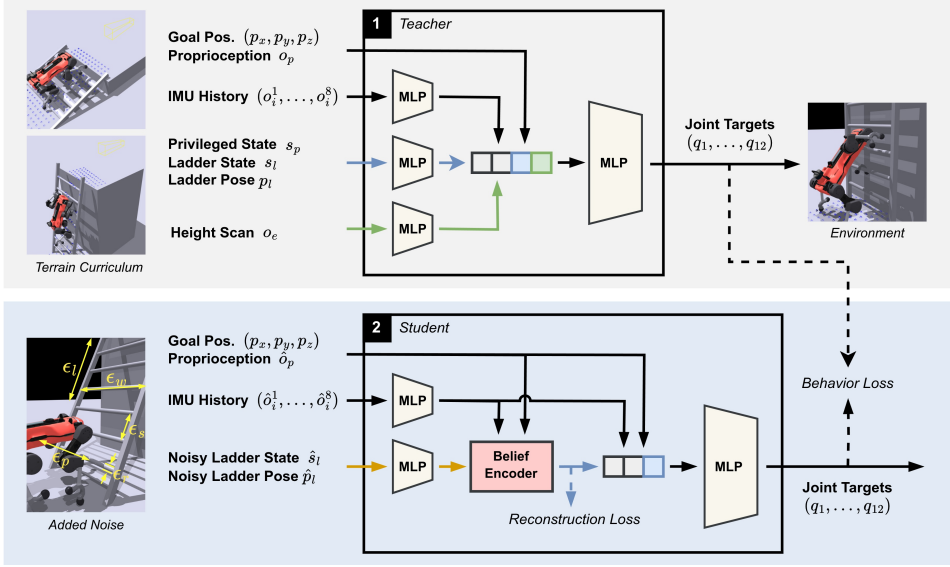
具体来说,他们首先在仿真环境中训练了一个“教师策略”。这个教师可以获得完美的环境信息,包括机器人自身状态、周围地形高度等。通过反复尝试,教师逐渐掌握了攀爬技巧。
接下来,研究人员训练了一个“学生策略”。学生只能获得有噪声的传感器数据,更接近现实情况。学生通过模仿教师的动作,同时学习如何从有限的信息中推断出真实环境状态。
这种“教师-学生”的训练方法非常巧妙。它让机器人能够在理想环境中快速学习复杂技能,同时又具备应对现实世界不确定性的能力。
控制策略的核心在于其复杂的输入-输出系统。输入层包含了丰富的状态信息,包括机体状态(位置、速度、姿态)、12个关节的角度和角速度、足端接触力以及梯子的位置和方向信息。输出层则直接控制机器人的运动,包括12个关节的目标角度和每个关节的刚度参数。这种设计允许控制策略根据当前状态和环境信息,精确地调整机器人的姿态和动作,实现流畅的攀爬。
为了增强策略的鲁棒性,研究团队进行了全面的测试。除了随机生成不同参数的梯子,他们还在仿真中测试了不同倾角(70°到90°)、横档间距(0.25m到0.35m)和横档半径(0.02m到0.03m)的梯子。同时,他们在仿真中添加了随机推力,模拟现实世界中可能遇到的干扰。这些测试确保了控制策略能够应对各种可能的场景和意外情况。
▍从虚拟到现实:令人印象深刻的零样本迁移
将在仿真中训练的策略直接部署到真实机器人上,这被称为“零样本迁移”。它是检验强化学习方法实用性的重要指标。研究团队选择了ANYmal D四足机器人作为测试平台。
将仿真中训练的策略迁移到ANYmal D四足机器人上,研究团队面临几个关键挑战。首先是状态估计问题,实际机器人无法直接获得精确的身体状态信息。研究团队可能使用了扩展卡尔曼滤波器(EKF)融合IMU数据和腿部运动学信息,实时估计机器人的位置和姿态。其次,考虑到传感器数据采集、网络传输和控制指令执行的延迟,策略输出可能经过了一个前向模型预测,以补偿系统延迟。最后,团队实现了多层安全机制,包括软件限位、紧急停止逻辑等,确保实验过程中机器人和环境的安全。
在性能测试方面,研究团队使用了几个关键指标来量化机器人的攀爬性能。除了成功率和速度,他们可能还使用了基于质心投影的稳定性度量,来定量评估攀爬过程中的动态稳定性。在70°和80°倾角的梯子上,机器人实现了100%的成功率(每种角度4次测试全部成功)。即使在90°的完全垂直梯子上,也取得了67%的成功率(3次中成功2次)。
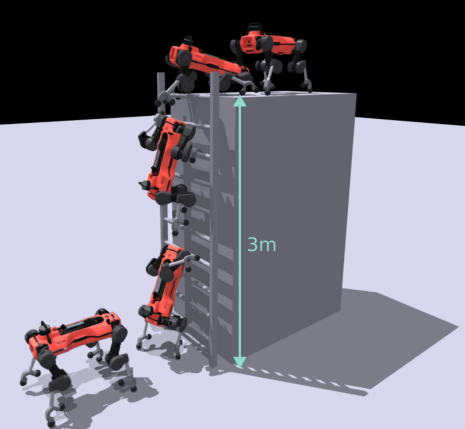
更令人惊讶的是机器人展现出的速度。在1.8米长的梯子上,它仅用了4秒就完成了攀爬。这比之前报道的四足机器人攀爬速度快了232倍!
研究人员还进行了一系列鲁棒性测试。他们在机器人的一条腿上系上绳子,在攀爬过程中不定时拉动。即使面对这种未建模的干扰,机器人仍然能够稳定地完成攀爬任务。这充分证明了所开发控制策略的适应能力。
▍突破性进展的意义何在?
这项研究的重要性远不止于让机器人爬梯子这么简单。它代表了四足机器人能力的一次质的飞跃,有望为工业应用带来革命性变化。
它极大地扩展了四足机器人的工作范围。在工业环境中,梯子是一种普遍存在的基础设施。此前,这些区域往往需要人工检查,存在安全隐患。现在,机器人可以代替人类完成这些高风险任务。
这项技术还体现了机器人形态设计和控制算法的协同创新。钩爪的巧妙设计与先进的学习算法相结合,产生了超越各自局限的整体效果。这为未来机器人设计提供了新的思路。
此外,零样本迁移的成功,展示了强化学习在解决复杂运动控制问题上的潜力。这种方法可以推广到其他具有挑战性的任务中,为机器人赋能更多高难度技能。
当然,研究仍有改进空间。比如,目前的系统仍需要外部定位系统来获取梯子的位置信息。未来如果能够结合视觉感知,实现完全自主的梯子识别和攀爬,将会更具实用价值。
总的来说,这项研究为四足机器人的发展开辟了新的方向。它让我们看到,在不久的将来,灵活敏捷的四足机器人或许真的能够像科幻电影中那样,轻松穿梭于各种复杂环境之中。



