
多维度的触觉传感系统或将成为人形机器人的“第二感官”。作为人形机器人、可穿戴设备等新兴领域发展的底层支撑技术,触觉传感器催生了更灵活、智能的机械手等新产品,为人形机器人特定任务的执行提供了新的可能性,也为人机交互提供更为自然和智能的体验,具有广泛的应用前景,正受到越来越多的关注,市场前景日益明朗。根据VMR的预测,2020年全球触觉传感器市场规模为112.5亿美元,而2028年全球触觉传感器市场将达到260.8亿美元。
随着我国更深入地参与全球产业链,为触觉传感器在本土崛起提供了有利的市场土壤,在3D打印、电子印刷、微机械加工等制造工艺方面显著进步的基础上,目前国内触觉传感器行业迎来全新发展机遇,不少企业涌现。那么,哪些企业正在围绕人形机器人领域深耕,本文盘点了四家企业的核心技术与做法。
▍宇立仪器有限公司
宇立仪器以其深厚的研发实力和技术底蕴,在力传感器及力控技术的开发和应用领域确立了显著的核心优势。其核心团队拥有超过30年的传感器设计和力控经验,宇立仪器的技术创新能力、丰富的产品线及广泛的市场应用,共同构成了其在人形机器人产业中的独特优势。
在技术创新方面,宇立仪器拥有100%自主研发及生产技术,传感器型号超过500种,实际应用案例超过2000例。这种强大的研发能力使得宇立仪器能够不断推出适应市场需求的新产品,满足人形机器人产业对高精度、高可靠性力传感器的迫切需求。
在产品线方面,宇立仪器提供多轴力传感器、力控打磨设备和汽车测试设备等一系列产品,产品为机器人的感知、控制和测试提供了全面的解决方案。特别是在人形机器人的力觉感知和执行方面,发挥了关键作用。

宇立仪器M35XX系列六轴力传感器
此外,宇立仪器在人形机器人产业中的价值不仅体现在技术层面,更在于其对国家科技创新发展和社会与行业进步的推动作用。通过提供高质量的力传感器和力控设备,宇立仪器助力人形机器人产业的发展,推动了相关领域的科技创新和产业升级。同时,宇立仪器的产品和服务也广泛应用于医疗康复行业,为残障人士的生活带来了实质性的改善,体现了社会责任和人文关怀。

MagicLab机器人脚腕处采用宇立传感器
宇立仪器在人形机器人领域的创新技术和产品突破显著。公司推出的多轴力传感器具有高精度、高灵敏度等特点,能够实时感知人形机器人运动状态和外界环境信息,为人形机器人的精准控制和决策提供了重要依据。
在应用进展方面,宇立仪器已经与多家知名人形机器人企业展开了深度合作。例如,在MagicLab机器人项目中,宇立仪器提供了定制化的手腕及脚腕力传感器方案,帮助MagicLab机器人实现了更加精准和稳定的运动控制。此外,在优必选Walker S人形机器人项目中,宇立仪器的力传感器也发挥了重要作用,为Walker S人形机器人的感知和交互能力提供了有力支持。

优必选Walker S手腕处采用宇立传感器
宇立仪器表示,将继续秉持“让机器人力控更简单,让人类出行更安全”的使命,在人形机器人领域深耕细作,不断推动技术创新和产品升级。公司计划进一步扩大研发团队规模,加强与国际先进企业的技术合作与交流,引进和培养更多高素质人才。同时,宇立仪器也将加大对人形机器人专用力传感器和力控设备的研发力度,推出更多具有自主知识产权的创新产品。
未来,宇立仪器还将持续致力于成为人形机器人产业中的领军企业。公司将以市场需求为导向,不断优化产品结构和市场布局,提升品牌影响力和市场竞争力。同时,宇立仪器也将积极参与国家科技创新计划和产业标准制定工作,推动人形机器人产业的健康发展和产业升级。
▍武汉华威科智能技术有限公司
武汉华威科智能技术有限公司成立于2011年3月,起源于华中科技大学,是由中国科学院熊有伦院士发起创立,秉承坚守“科研成果转化,产业科技报国”初心,下设广东思谷、湖北华威科两家子公司,以“感知世界,智造未来”为愿景,致力于发展成为中国乃至世界领先的智能感知产品与解决方案提供商。
目前,华威科建立了60多人的工程技术研发团队,公司被认定为省级柔性电子制造工程中心,承担了国家科技部重点研发计划、国家863、973等多个重大专项项目的研发工作。累计申请专利160余项,参与工业互联网等领域技术标准4项,相关技术成果荣获国家技术发明二等奖。依托国家级平台力量,产学研体系,华威科组建了一支由科学家+总工+产品专家组成的核心研发团队,团队人员平均年龄33岁,博士、硕士学历研发人员占比大于30%,实现基础研究-技术研发-产品开发完整链。产学研用协同创新,核心技术持续突破。首个柔性传感领域工艺、机理、材料、装备制造IDM制造模式,在柔性电子产品方面拥有一系列知识产品,引领“类皮肤”触觉感知。申请140余项专利,8项标准制定。
华威科在电子皮肤感知方面的进展最为令人瞩目,其研发了多模态触觉传感器、仿生柔性触觉传感器和超高灵敏度仿生电容传感器,有望助力人形机器人再进一步。
例如其设计制作的多模态触觉传感器,能够实现压力、剪切、粗糙度、硬度等多模态物理量的精确测量,适合应用于机器人灵巧手的感知操作;实现了具有仿生互锁结构的柔性摩擦电触觉传感器,通过仿生结构放大表面接触力对传感功能层的影响,其灵敏度比现有压力传感器高14倍。
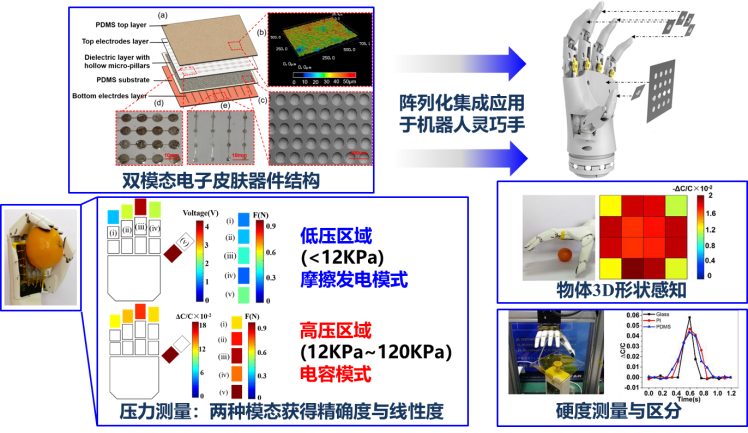
华威科电子皮肤示意图
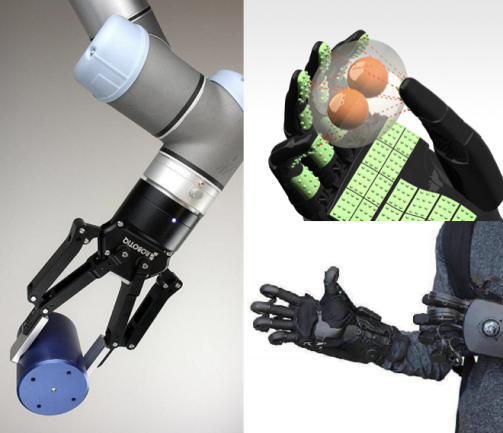
华威科目前还已经小批量出货的产品序列包括灵巧手指尖触觉,结合触觉传感器,视触融合,实现复杂场景下的灵巧抓取;电子皮肤,赋予人形机器人整体仿生触觉感知能力,进一步提升人形机器人情绪识别,人机交互能力;智能足,结合足底电子皮肤优化人形机器人在不同步态下的灵活移动。目前公司产品已和数家国内头部人形机器人,医疗器械,先进制造企业展开合作。

华威科机器人灵巧手
据悉,华威科目前在研下一代高精度柔性触觉传感器全印制造装备及其产业化,研发可适用于大规模、低成本量产卷到卷全印刷制造装备,建设下一代高精度柔性触觉传感器全印刷量产能力。同时在搭建人形机器人智能感知场景中试平台,主要由企业与高校联合打造,以智能感知为核心的复合型检测实验室与中试平台。针对实验室,围绕人形机器人各类智能感知功能、部件、传感器等感知技术检测,配备全面高端检测设备与定制化工装夹具平台,满足各类功能在检测仪器与辅助环境上的搭建。
▍北京他山科技有限公司
他山科技是一家专注于人工智能触觉传感芯片及其应用解决方案的研发商。公司创立于2017年,汇集了清华大学、曼彻斯特大学等顶尖高校的资深研发团队精英。他山科技拥有自主知识产权的触觉感知芯片及类脑算法,已申请172项专利,其中包括78项发明专利,其中应用于人形机器人的关键核心专利40项。
经过多年沉淀,他山科技在触觉感知算法上解决了触觉多维感知信号同时解析的全球技术难题,同时研发出了全球首款数模混合AI触感专用芯片,打破了触觉感知在行业发展的瓶颈,形成了在AI触觉领域软硬一体的解决方案。在人形机器人领域主要用于机器人指尖触觉传感器和电子皮肤等场景,并且在汽车、家电、消费电子等多个领域都有广泛应用。目前,他山科技还已与小米、因时机器人、奔驰、宝马、比亚迪、九阳等众多国内外行业领导者建立合作关系。
他山科技机器人方向应用场景
他山科技最值得一体的成绩是研发了全球首款数模混合AI触感芯片,也是首款基于SNN(脉冲神经网络)的分布式类脑产业化应用芯片。这一技术的突破,使得公司的触觉传感器在模拟人体神经系统方面取得了革命性的进展。具体而言,他山科技的触觉传感器采用独创的R-SpiNNaker分布式类脑芯片架构,该架构不仅模拟了人体的三类神经元—传入神经、中枢神经和传出神经—还集成了三维空间电容层析算法模型与逻辑四核脉冲神经网络。这种设计使得触觉传感器不仅能够实现高精度三维力感知,还能实现材质识别,接近觉感知,同时可实现动态协同感知与动态协同控制。

他山科技AI触觉感知芯片与触觉传感器
他山科技的触觉传感器技术突破在以下几个方面尤为显著:首先是高精度&材质识别。他山科技的触觉传感器支持一维力到三维力测量,测力分辨率可以达到0.001N,并可实现非接触的材质识别,可识别超30多种物体材质。
其次是接近觉&非接触觉体系。基于电容场效应原理,他山科技研发的触觉传感器能实现高分辨率的非接触触觉和交互感知,这一技术不仅可以支持人体/物体的非接触识别(10cm),还能支持接近觉及位置判断(2cm),同时可以实现材质识别/纹理识别及压力/三维力等多种触觉维度变量的同时解析。
还有动态协同感知+动态协同控制也是其亮点技术。他山科技的AI触觉传感芯片基于R-SpiNNaker架构,支持片内单核或双核和小规模片间分布式SNN。灵活的分布式架构,可以支持不同规模的协同感知和极低时延的协同计算,实现触觉传感器/电子皮肤的分区、分级的动态协同感知及协同控制,这使得其产品可以灵活应用于不同规模和需求的场景。
得益于采用R-SpiNNaker的四核类脑芯片架构,他山科技使单触感单元神经元模拟数量保持在低于128个,大幅降低了制造成本,这使其产品在保持高性能的同时,也适合大规模商业推广。

他山科技主动触觉解决方案
此外,他山科技的触觉传感器产品已经在包括人形机器人、灵巧手和机械臂等多种机器人产业链中得到应用。公司与多家上下游厂商合作,将触觉传感技术应用于实际生产和日常生活中,实现了材质识别、内部结构检测等多种交互功能,这些应用的成功展示了他山科技在触觉传感领域的领先地位和广阔的市场潜力。
他山科技开发的分布式模拟神经感知技术赋予了机器人电子皮肤以高级的动态感知组合能力。这种技术不仅使机器人拥有了超越人类的触觉体验,还使其能够无需直接接触即可感知物体的材质和内部结构。该技术还配备了可进行标准化训练的专有脉冲神经网络,适用于机器人感知单元,从而将来能够实现高效的大规模生产。
他山科技还是少有的同时具备触觉感知算法和AI触觉感知芯片的团队,其触觉传感器具备自适应力,材质识别,接近觉,高分辨率,可大规模部署,动态协同感知、动态协同控制等特性,相关的技术评价指标均处于全球领先。其方案极大地提高了人形机器人触觉传感器及电子皮肤的发展,解决了人形机器人在触觉感知方向上的壁垒,使人形机器人能够更准确地执行复杂任务,同时在人机交互的同时还能够提前识别和规避潜在的危险,进一步提升机器人的安全性和可靠性。
他山科技软硬件一体的AI触觉传感器,正成为推动人形机器人和其他智能设备发展的关键力量。随着市场需求的不断扩大和技术的持续进步,他山科技预计将在未来的人形机器人触觉传感及电子皮肤领域占据重要的市场地位。除此之外,他山科技也在汽车、家电、消费电子等行业中有着广泛的场景应用。
▍深圳市鑫精诚传感技术有限公司
“鑫精诚传感器”成立于2009年,以研发、生产、销售、服务为一体的国家高新与专精特新技术企业。拥有从事智能传感器与控制仪表行业多年的专业研发设计经验团队50余人,获得发明专利20余项,实用新型专利65余项,软著30余项。
鑫精诚传感器是国内最早关注并研发六维力传感器的企业之一,公司研发的六维力传感器具有精度高、抗冲击能力强、零点稳定、信噪比大、高低温特性好、刚度大、长期可靠性强、尺寸可多样化定制等优点,通过特殊独有的解耦方法设计,使传感器的串扰误差非常小,尤其是长期的串扰误差小。目前公司的六维力传感器产品直径跨度覆盖9.5mm-400mm,力量程跨度从5N到500kN,力矩量程跨度从0.1N.m到20kN.m,可覆盖绝大部分应用领域。
鑫精诚传感器同样也是国内最早关注并研发关节扭矩传感器的企业之一,公司研发的关节扭矩传感器具有刚性大、抗冲击能力强、零点漂移小、抗偏载能力强、正反向对称性好、装配影响小、温度特性好;公司拥有独有的交叉载荷影响自补偿技术,使得交叉载荷的对扭矩的信号影响小。
公司从创立之初就一直专注于力学传感器行业,近年来对人形机器人行业的力觉应用非常重视并投入了大量的研发资源,积极参与人形机器人公司的各类力觉传感器应用痛点的解决。通过大量的自主研发、试验和改进提升,力求可以提供适合人形机器人使用的高性价比的产品,通过积极参与、主动投入的方式来实现和人形机器人行业共发展。
鑫精诚传感器是目前国内六维力传感器结构创新相关专利获得最多的企业。公司成功开发了世界上最小的电阻应变式六维力传感器,这个产品体现了目前电阻应变式六维力传感器设计及制造的最高技术难度,传感器直径仅9.5mm,感知精度可达0.01N和0.001N.m。产品可以被应用与机器人灵巧手上,让灵巧手拥有精确力学感知;
 鑫精诚最小应变式六维力传感器
鑫精诚最小应变式六维力传感器
同时,针对人形机器人鑫精诚还进行了部分创新,例如为了适应人形机器人的户外应用和涉水应用,公司成功开发了IP67防护级别的传感器,使得传感器不惧在潮湿环境中及水下使用;为了解决人形机器人在跳跃、跑动、碰撞时,对下肢六维力传感器的冲击而造成传感器过载或零点漂移的痛点。公司成功开发了可以承受10倍以上冲击零点不变、使用寿命亿次以上的新型六维力传感器。

图96 鑫精诚六维力传感器防护等级
不仅如此,为了解决人形机器人在不同的工作温度中快速切换使用,传感器的数据不发变化的痛点,公司成功开发出可以在不同温度中快速切换,局部温度变化不影响传感器整体输出精度的新型六维力传感器;为了解决目前六维力传感器价格偏高,人形机器人厂家应用成本无法下降的痛点,公司通过大量的研发技术迭代优化结构成本、精益化生产优化制造成本、大批量制造优化物料成本等方式推出一款超级性价比的高精度六维力传感器。彻底解决了六维力传感器价格贵、用不起的问题;
鑫精诚还在关节扭矩传感器领域有着产品突破和技术创新,例如为了解决关节扭矩传感器的交叉载荷对输出信号影响的痛点,公司开发了独有的交叉载荷影响自补偿技术,使得交叉载荷的对扭矩的信号影响大大的减小。
同样为了解决人形机器人在跳跃、跑动、碰撞时,对关节扭矩传感器的冲击而造成传感器过载或零点漂移,以及原有电阻应变式关节扭矩传感器的刚性不足导致定位精度误差大的痛点,公司应用新型的硅微熔应变技术开发一款高刚性、高冲击性、高使用寿命的关节扭矩传感器。
鑫精诚还看到,一个人形机器人中关节数量众多,为了在合理的总价内让每个关节都可以安装应用关节扭矩传感器,公司正投入大量的资金用于自动化生产线的建设,通过自动化生产来降低产品成本和满足巨大的产能需求。
据悉,鑫精诚在未来几年将会继续关注人形机器人力学传感器的行业发展,并加大研发投入,继续在高刚性、高过载能力、抗冲击性能、高防水性能、高稳定性、高使用寿命、低成本等方面深耕布局。
在新产品线上公司也将开发毫牛级别的超微型六维力传感器、集成多种物理量的融合型传感器,具有的多种自补偿功能的AI智能型传感器等创新型的传感器。与此同时公司也将继续主动参与解决各种力觉传感器在人形机器人种的行业应用痛点。在解决痛点的过程种实现技术的突破,最终实现和人形机器人行业共发展。



