
近年来,机器人技术在多个领域取得了重大突破,为未来智能化社会的发展奠定了坚实基础。本文将综述北京大学几项近期在机器人领域的重要研究成果,涵盖了智能家居、深海探测、两栖机器人、光伏清洗、具身人工智能以及医疗机器人等多个方向。这些创新性研究不仅推动了机器人技术的进步,也为相关产业的发展提供了新的可能性。
一、智能家居机器人的新突破
北京大学、斯坦福大学与智源人工智能研究院的联合研究团队开发了一个创新的三维具身图文大模型系统,该系统能够指导机器人操作各类家电家具,实现复杂的长程任务。
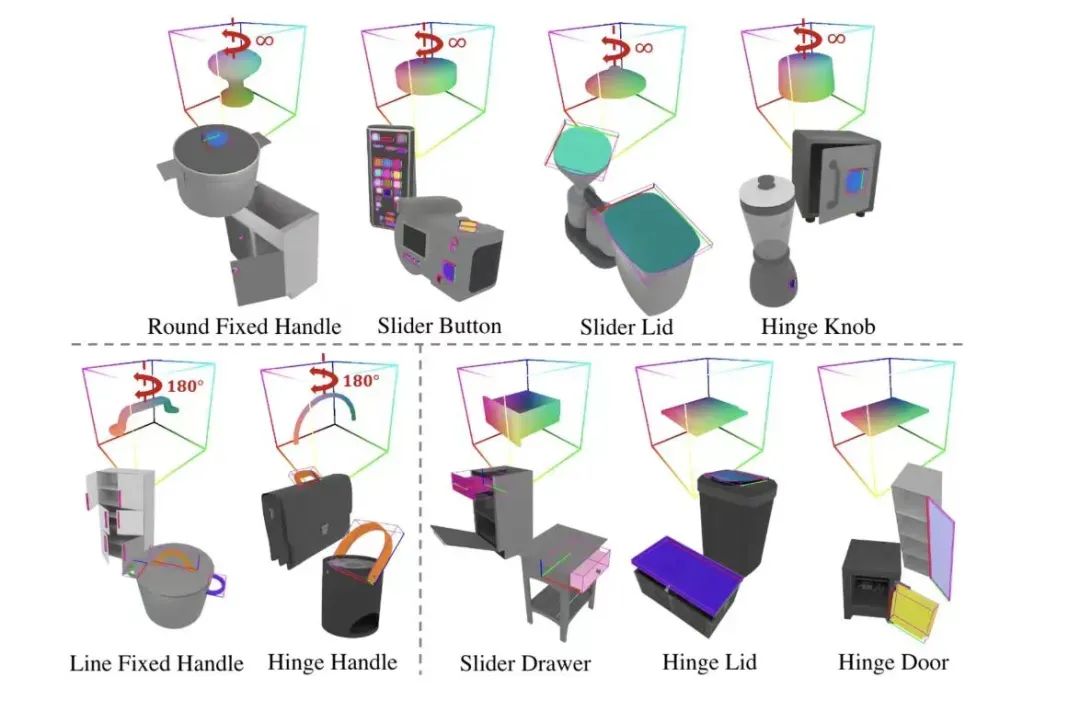
这个系统的核心在于将基于三维视觉的精准几何感知模型与擅长规划的二维图文大模型进行结合。研究团队创造性地将基于三维视觉的GAPart技术引入了机器人的物体操控系统SAGE中。这一创新使SAGE成为首个三维具身图文大模型系统,为机器人从感知、物理交互到反馈的全链路提供了全新的思路。
系统的一大亮点是其交互反馈机制。研究团队引入了一种机制,能够在互动过程中利用新获得的观测结果来更新感知结果并相应调整操作。为了实现这一目标,他们为互动过程设计了一个两部分的反馈机制。此外,为了解决首次观测中可能出现的遮挡和估算错误问题,研究者们提出了一个利用交互式观测来增强操作的模型。
这项研究的意义在于显著提升了机器人在物体识别和操作方面的智能水平。SAGE系统实现了泛化的三维零件检测和精确的位姿估计,克服了以往二维图像模型在计算精度和推理能力上的局限。这不仅在决策层面增强了机器人的理解能力和问题解决能力,而且在执行层面展示了基于GAPart位姿的强大物理操作能力,实现了对不同零件的泛化性操作。
这一突破性进展为机器人在智能家居、家电操控等领域的应用开辟了新的道路,向通用性和智能化迈出了重要一步。未来,这项技术有望在智能家居系统中得到广泛应用,为用户提供更加便捷、智能的生活体验。
二、深水应用的生物模拟驱动技术
随着深海探索需求的增加,开发能适应极端水压的高效水下机器人变得愈发重要。传统的驱动技术在深水环境中往往面临性能受限的问题。为了提升能源效率和设备可靠性,北京大学材料科学与工程学院杨槐团队领衔的研究项目"打结人工肌肉用于生物模拟驱动的深水应用"取得了重大突破。
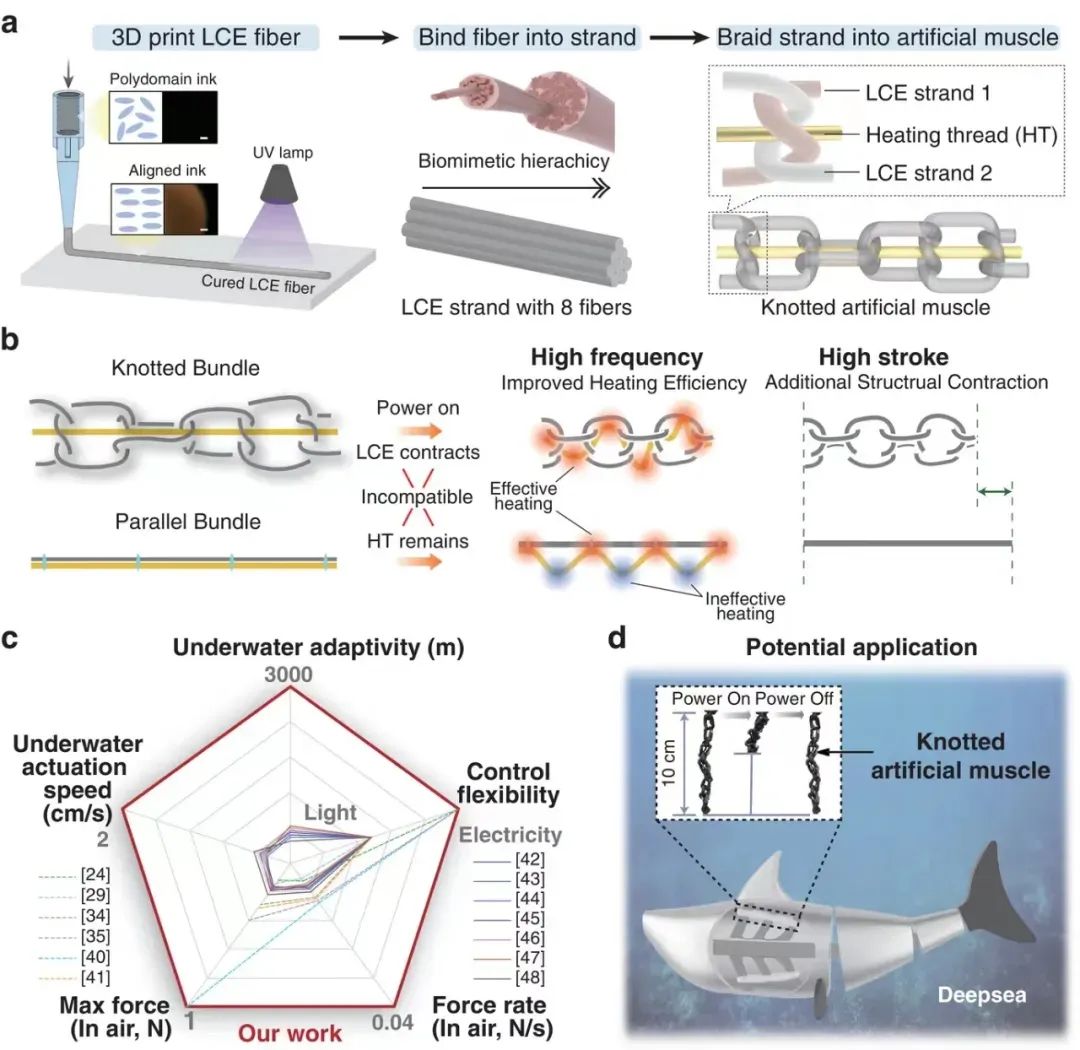
研究团队借鉴软体动物的肌肉机制,发展出了创新的"打结人工肌肉"技术。这种人造肌肉由三维打印液晶弹性纤维和加热细线编织而成,采用独特的分层编织结构。通过数值模拟和实验验证,研究人员发现这种结构可以提供更大的线性冲程、力速率和损伤耐受性。
这种打结人工肌肉展现出令人瞩目的性能。在水下3000米深处,它能以1赫兹的频率显示出可靠的驱动周期。研究团队通过推动模型船的实验,进一步展示了其在实际应用中的潜力。这项成果的意义在于解决了传统驱动技术在深海应用中的局限性,为构建轻量、智能、高适应性的水下机器人提供了全新的动力源。打结人工肌肉具有高效能量转换、快速响应、自我修复及生物相容性等多重优势,有望重塑深海探测设备的设计理念。
这项技术的应用前景广阔,可能推动深海科研、资源勘探、环境保护乃至深海救援等领域实现技术跨越。随着材料科学与仿生工程技术的进一步发展,打结人工肌肉有望实现更大规模的生产与更广泛的应用场景拓展,为深海探索和开发提供强有力的技术支持。
三、多模态软体两栖机器人的创新设计
在两栖机器人领域,软体机器人因其能够主动或被动地根据周围环境调整自身形态,以及具有固有柔顺性的独特优势,展现出了巨大的潜力。然而,在实现高机动性和多地形适应能力方面,软体两栖机器人仍然面临着巨大挑战。北京大学工学院谢广明教授团队的研究人员在这一领域取得了重要突破。

受果蝇幼虫和海蛞蝓独特的运动模式启发,研究团队提出了一种基于塑料片增强的薄膜气动驱动器的软体两栖机器人。这款机器人的运动核心是由四层薄型气动执行器组成的驱动系统。研究人员对传统设计进行了创新性改进,在两个腔室之间嵌入了一片不可拉伸的塑料片。这一设计不仅实现了对执行器弯曲形态的限制,显著提升了机器人的输出扭矩,还能在机器人身体弯曲时储存能量,有助于机器人在随后身体展平时实现更远的跳跃距离。
这种将柔软薄膜与半刚性塑料片相结合的设计理念,为机器人提供了执行连续跳跃和游动所需的灵活性与强度。通过身体交替的弯曲和展平动作,该机器人在陆地上实现了最高移动速度1.77BL/s,而在水中则达到了最高游动速度0.69BL/s,其性能均超越了现有的软体两栖机器人。
研究团队还借鉴了果蝇幼虫的跳跃机制来优化机器人设计。通过观察果蝇幼虫的弯曲状态,研究人员发现其尾部曲率大于头部曲率的独特结构保证了向前的跳跃运动。基于这一发现,研究人员在机器人设计中加入了一对侧鳍,用来限制机器人头部弯曲。这一设计细节确保了在身体弯曲时,机器人能够尾部与地面充分接触,从而帮助其实现更稳定地向前跳跃。
这项研究的软体两栖机器人设计展现出卓越的多地形适应性和多样化运动能力,显著提高了机器人在复杂环境中的机动性和灵活性。它能够有效适应斜坡、障碍、台阶以及不同质地的地面如泥地、沙地和砾石等,使其能够在多变的地形中执行任务。这一特性对于搜索与救援、战场侦察和环境监测等领域具有重要意义。
此外,该机器人展现了多种运动模态,包括在陆地和水生环境中的前进、后退、转弯、自翻等动作,增加了其适用场景和操作复杂度。高跳跃速度和游泳速度指标表明了其优越的运动效率,突破了以往软体两栖机器人的速度限制,为未来高速、高效软体机器人的设计和应用提供了新的视角和技术参考。
四、智能光伏清洗解决方案
随着太阳能产业的快速发展,光伏板的清洗维护问题日益凸显。传统的人工清洗方式存在诸多问题,包括成本高、周期长、效率低、水资源浪费严重等。此外,人工操作时易受力不均匀影响,容易导致光伏电板刮痕或隐裂。特别是在水洗过程中,无法精确掌控水压变化,高水压虽然有助于提高清洗效果,但也可能对光伏电板造成不良冲击。
为解决这些问题,北大智慧城市实验室提出了采用D2PV智慧终端及两栖光伏清洗机器人的创新解决方案。这一方案不仅提高了清洗效率,降低了维护成本,还能够避免传统清洗方式可能导致的光伏电板损害和安全风险。

D2PV智慧终端的设计包含了多项创新功能。首先,它能够收集光伏板的性能数据,如电压、电流和温度。这些数据有助于实时监测系统的运行状况,为优化和故障排除提供基础。其次,通过互联网实现远程监控,使用户能够随时随地查看太阳能系统的状态,提高了系统管理的灵活性和便利性。
此外,D2PV智慧终端还具备性能优化功能,能够自动调整设置以最大化能源产出,可能包括调节光伏板的角度、管理电池存储等。这有助于提高太阳能系统的整体效率。最后,它还具备故障诊断功能,能够识别系统中的问题并发出警报,使运维人员能够及时采取措施,降低维护成本和系统停机时间。
与D2PV智慧终端配套的两栖光伏清洗机器人则进一步提升了清洗效率和质量。这种机器人能够适应不同的光伏板安装环境,无论是地面还是水上光伏电站,都能够进行高效清洁。它采用精确控制的水压系统,既能确保清洗效果,又能避免对光伏板造成损害。
这项技术的应用不仅局限于光伏领域,还延续了无人机在建筑清洗领域的成功经验。随着对自动化和智能化解决方案的需求不断增长,这种多用途和全面化的技术演进为无人机在未来多个行业中的应用提供了坚实的基础,并有潜力进一步推动整个无人驾驶技术产业的发展。
五、具身大模型在机械臂控制中的应用
人工智能和机器人技术的融合一直是研究热点。北京大学董豪团队最新发布的具身大模型研究成果"ManipLLM"在这一领域取得了重要突破。这项研究探索了大语言模型在控制机械臂完成各种日常物体操作方面的潜力,实现了仅通过一张物体图片就能指导机械臂完成复杂操作的目标。
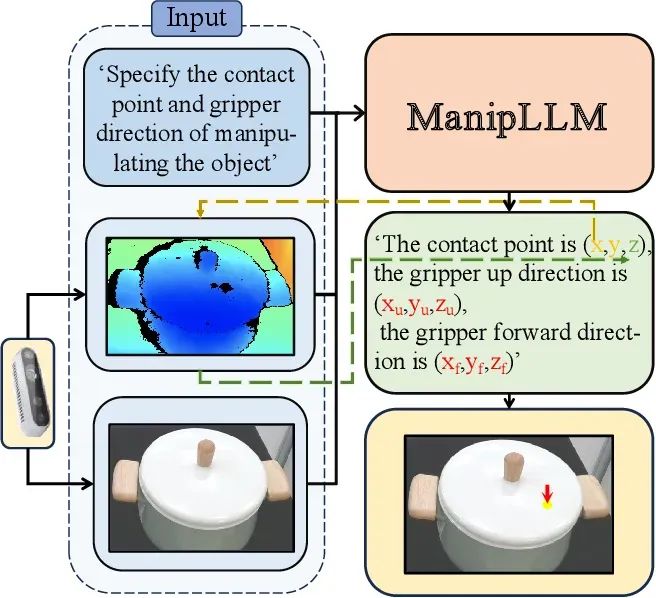
ManipLLM的核心创新在于利用大语言模型的推理和面对开放世界的泛化能力,成功提升了模型在物体操纵方面的泛化能力。与传统方法不同,ManipLLM致力于探索和激发大语言模型在预测低层原子任务的能力,从而实现对更多类别物体的以物体为中心的通用操纵。
研究团队通过设计了三个学习阶段来实现这一目标。首先,他们利用大语言模型的推理能力来解析任务指令,并生成相应的操作计划。其次,系统将这些计划转化为具体的操作点和方向,直接在物体图像上进行预测。最后,通过一个无需学习的闭环主动式阻抗适应策略,系统能够完成完整的操纵过程。
这种闭环主动式阻抗适应策略的应用是ManipLLM的另一个重要创新。在获得初始接触姿态的输出后,系统利用这一策略来不断微调末端执行器的旋转方向,从而灵活地适应物体的形状和轴向,逐步完成对物体的操控任务。具体来说,系统会在当前方向的周围加入一些微小的变化,生成多个可能的移动方向,然后尝试每个方向,选择能让物体移动最远的方向作为下一步的移动方向。
ManipLLM的研究成果具有重要的理论和实践意义。它将大语言模型的推理和泛化能力引入机械臂控制领域,实现了对各类日常物体的精确操控。这一技术不仅显著提升了模型在未知环境中的泛化能力,还展现了其在多样化任务执行中的出色表现。
此外,ManipLLM简化了人机交互过程,使得非专业用户也能轻松指导机械臂完成任务。这为智能机器人在家庭服务、医疗辅助和灾难救援等潜在应用场景中的应用开辟了新的可能性。
这项研究推动了智能机器人领域的发展,为智能机器人与人类生活更紧密结合提供了新的道路和技术基础。未来,基于ManipLLM的技术有望在各种需要精确物体操控的领域得到广泛应用,从而提高工作效率,改善人机协作体验。
六、医疗机器人在微创手术中的应用
在医疗领域,机器人技术的应用正在不断拓展,特别是在复杂的微创手术中。北京大学李学松教授领导的上尿路修复团队最近发表了一篇关于三维重建导航辅助机器人输尿管成形术治疗腔静脉后输尿管的研究文章,为这一罕见先天性发育畸形的治疗提供了新的解决方案。
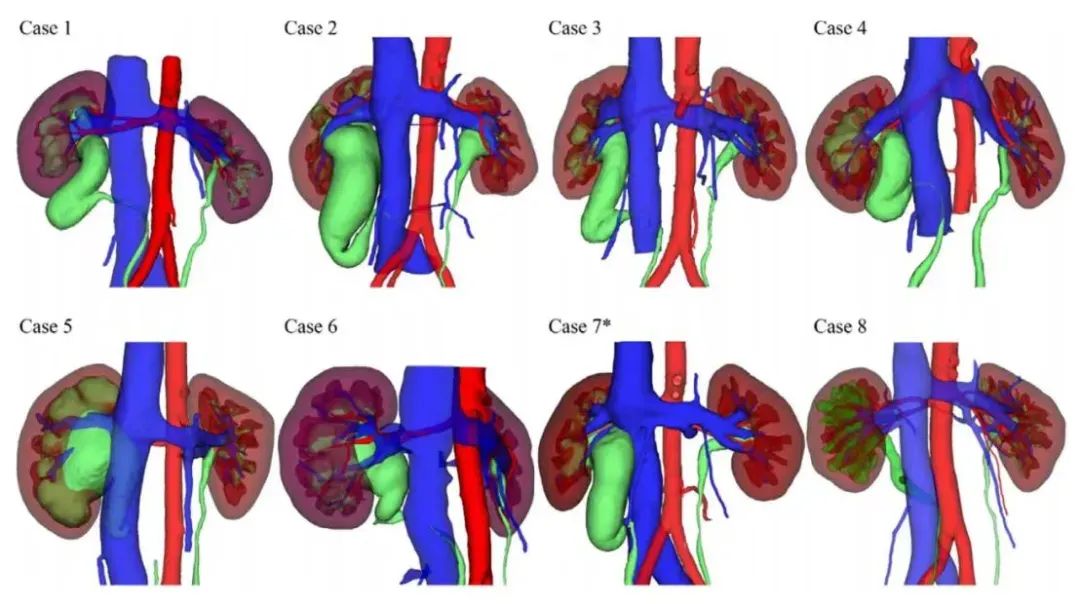
腔静脉后输尿管是一种罕见的先天性发育畸形,输尿管沿下腔静脉后方绕行再回到正常位置,可引起输尿管梗阻和肾积水。传统的手术治疗非常具有挑战性,需要对下腔静脉的后方和侧面进行广泛且精细的解剖工作,稍有不慎可能造成大出血。
李学松教授团队开发的三维重建导航辅助机器人输尿管成形术为这一复杂手术提供了创新的解决方案。这项技术结合了三维重建、导航系统和机器人手术的优势,大大提高了手术的精确性和安全性。
研究团队详细展示了该项手术的具体技术细节,包括患者体位、trocar布局和机器人对接位置,以及腔静脉后输尿管的定位、游离、离断和体内吻合等步骤。这些详细的技术说明为其他医疗机构开展类似手术提供了宝贵的参考。
更重要的是,研究团队通过分析不同手术类型的临床数据和随访结果,证明了三维重建导航辅助机器人输尿管成形术治疗腔静脉后输尿管的安全性和可行性。这一结论为该技术的临床推广奠定了坚实的基础。
这项技术的应用意义重大。首先,它为腔静脉后输尿管这一罕见疾病的治疗提供了一个安全、有效的新选择。其次,该技术的成功应用展示了机器人辅助手术在复杂泌尿系统手术中的潜力,为其他类型的微创手术提供了借鉴。最后,这项研究为世界范围内的上尿路修复医生提供了宝贵的经验和参考,有助于推动这一领域的技术进步。
随着技术的进一步完善和推广,三维重建导航辅助机器人输尿管成形术有望成为治疗腔静脉后输尿管的标准方法,为更多患者带来福音。同时,这项技术的成功也为机器人在其他复杂微创手术中的应用开辟了新的道路,推动了整个医疗机器人领域的发展。



