
近几年由于材料科学的进步,软机器人相关技术近几年研究成果显著,与传统的刚性机器人相比,软机器人的设计灵感来源于自然界中的生物系统,如蠕虫、章鱼、壁虎和青蛙等。这些生物利用柔软、有弹性的材料,在复杂环境中展现出卓越的运动能力。但软机器人在实际应用中,由于依赖外部电力或驱动电源,并通过物理系绳连接,导致其活动范围受限。此外,传统软执行器如气动网络执行器(pneu-nets)的重量问题,也成为制约软机器人无束缚操作的关键因素。为解决这一问题,近日由Ching等人开发的FiBa(薄膜气球)软执行器,为软机器人领域带来了新的突破,该研究成果已发表在《Science Robotics》期刊上,参与研究的成员来自新加坡科技设计大学(SUTD)、新加坡国立大学(NUS)和昆士兰科技大学(QUT)。
▍FiBa软执行器采用Dragon Skin 30硅胶与横向曲率的聚合物薄膜设计
FiBa软执行器采用独特的结构设计,将3D打印的气动气球与具有横向曲率的聚合物薄膜相结合。这种设计的优势在于能够有效减轻执行器重量同时还保留其多功能特征,从而实现无束缚操作。
与传统的硅橡胶材料相比,FiBa执行器采用了Dragon Skin 30硅胶,这种硅胶具有更高的弹性模量(约593 kPa),能够在不增加过多重量的情况下提供更强大的驱动能力。高弹性模量意味着在相同体积下,Dragon Skin 30硅胶能够产生更大的内部压力,从而增强执行器的弯曲和驱动效果。
FiBa执行器的另一个关键组成部分是具有横向曲率的聚合物薄膜。这种薄膜材料不仅轻质,而且具有良好的柔韧性和可塑性。通过引入横向曲率设计,薄膜的局部刚度得到增强,能够在充气时产生定向弯曲,并在放气后迅速恢复原状。研究人员表示,通过设计横向曲率,聚合物薄膜的弯曲特性得到明显改善,从而提高了执行器的整体性能和可靠性。
值得一提的是,传统的平板薄膜材料在受到外力作用时容易发生无规则的扭曲和弯曲。而通过引入横向曲率设计,薄膜的弯曲特性得到定向增强。当气球充气时,薄膜会沿着预设的曲率方向弯曲,从而产生稳定的驱动力。这种定向弯曲特性不仅提高了执行器的控制精度,还延长了其使用寿命。
横向曲率设计还有助于提高执行器的结构可靠性和耐用性。在放气过程中,薄膜能够迅速恢复原状,避免了因长期变形而导致的性能下降和结构损坏。此外,通过优化曲率参数和薄膜厚度,可以进一步调节执行器的弯曲角度和驱动力,以满足不同应用场景的需求。
 FiBa模块示意图
FiBa模块示意图
在设计方面,FiBa执行器采用模块化设计方式,包括FiBa弯曲模块和FiBa可变刚度梁模块。通过模块化设计,研究人员可以快速制作执行器的原型并进行迭代优化。不同的模块可以组合成各种形状和功能的执行器,以满足不同应用场景的需求。这种快速原型制作能力不仅加速了产品的研发周期,还降低了成本风险。

弯曲结构和模块化气球的特征
FiBa执行器的模块化结构还拥有高度可定制性,通过调整模块的数量、排列方式和尺寸参数,研究人员可以定制出适应不同环境和任务的执行器。例如,在攀爬机器人中,可以通过增加抓握模块和弯曲模块的数量和布局,提高机器人的攀爬能力和稳定性。
为了实现无束缚操作,FiBa执行器还集成了电子元件如气动泵、阀门、电池和控制板等。在选择电子元件时,研究人员注重其轻量化和高效能。例如,采用微型气动泵和阀门可以减少系统的整体重量,使用高性能电池和控制板可以提高系统的能效和稳定性。轻量化电子元件能够让FiBa执行器在无束缚环境中长时间稳定运行。
在集成化方面,研究人员通过优化电子元件的布局和连接方式,减少信号干扰和能量损失,同时通过增加冗余设计和故障诊断功能,提高系统的可靠性和安全性。
▍FiBa软机器人四种形态以及落地场景探讨
为了验证FiBa执行器的性能和多功能性,研究团队成功展示了四种不受束缚的仿生运动模式,分别为受海龟启发的爬行、受尺蠖启发的攀爬、受蝙蝠启发的栖息和受瓢虫启发的飞行。
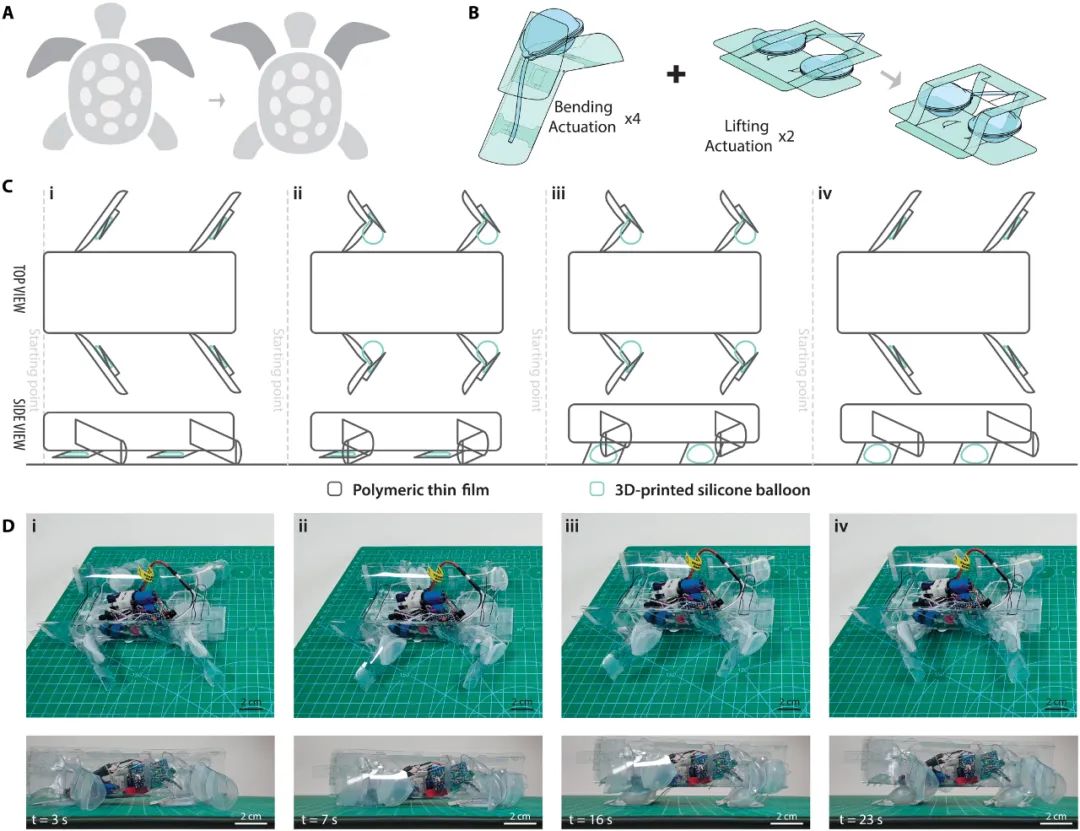
受海龟启发的爬行机器人
受海龟启发的爬行机器人通过模拟海龟在陆地上的移动方式,采用四个FiBa弯曲模块作为“鳍”,模拟海龟的前肢推动机器人向前移动。这些模块通过横向弯曲的聚合物薄膜与3D打印的气动气球结合,实现了轻量化和高效的弯曲运动。机器人还配备了升降执行器模块,以便在需要时调整机身高度,适应不同的地形条件。
应用场景方面,地震、海啸等自然灾害后,废墟中常存在大量狭窄缝隙,传统刚性机器人难以进入。而这款爬行机器人能够轻松穿越这些缝隙,携带生命探测仪等设备,搜寻被困者,并通过无线通信将现场情况实时传输给救援人员,极大地提高了救援效率。
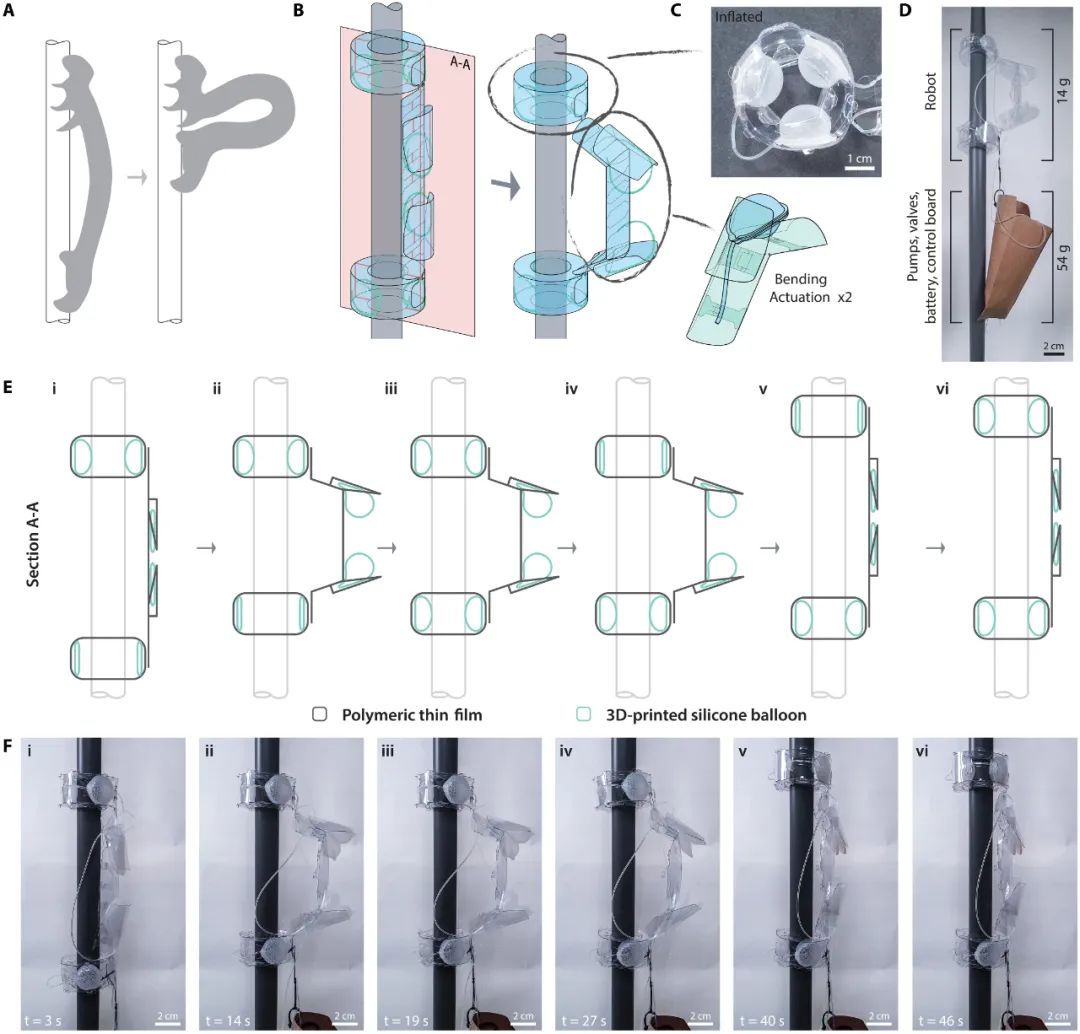
受尺蠖启发的攀爬机器人
受尺蠖启发的攀爬机器人通过模拟尺蠖的蠕动方式,利用FiBa弯曲模块和抓握模块实现垂直攀爬。抓握模块通过充气的硅胶气球紧紧包裹在攀爬表面,提供足够的支撑力。同时,FiBa弯曲模块驱动机器人沿攀爬表面移动,实现稳定攀爬。
在工业领域,这款攀爬机器人可以应用于垂直管道、桥梁、高楼外墙的检测与维护。机器人搭载高清摄像头、红外热像仪等设备,对结构表面进行细致检查,及时发现安全隐患,降低人工巡检的风险和成本。而在电力线路、通信塔等基础设施的巡检中,这款攀爬机器人同样表现出色。它能够沿着电线杆或通信塔快速上升,对线路绝缘子、塔体连接件等进行检查,提高巡检效率和准确性。
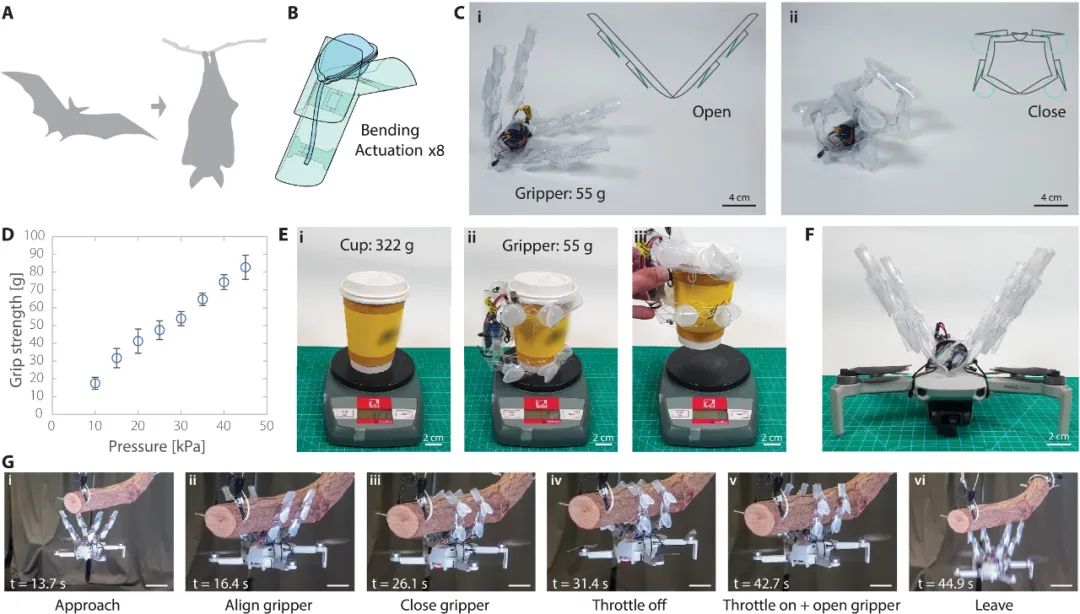
受蝙蝠启发的栖息机器人
受蝙蝠启发的栖息机器人通过FiBa模块构建了一个轻量级的四指夹持器,模拟蝙蝠倒挂在树枝上的栖息方式。夹持器内部的气动结构在充气后产生强大的抓握力,使机器人能够稳定地栖息在树枝、电线杆等支撑物上。
在应用落地方面,将这款栖息机器人安装在无人机上,可以大幅延长无人机的飞行时间。无人机在执行任务过程中,可以在支撑物上栖息以节省能源,待任务继续时再重新起飞,从而降低能耗成本,拓宽应用领域。在地质勘探、林业调查等野外作业中,栖息机器人可以作为临时支撑平台使用。无人机完成任务后可以在附近栖息充电或等待进一步指令,提高作业效率和安全性。
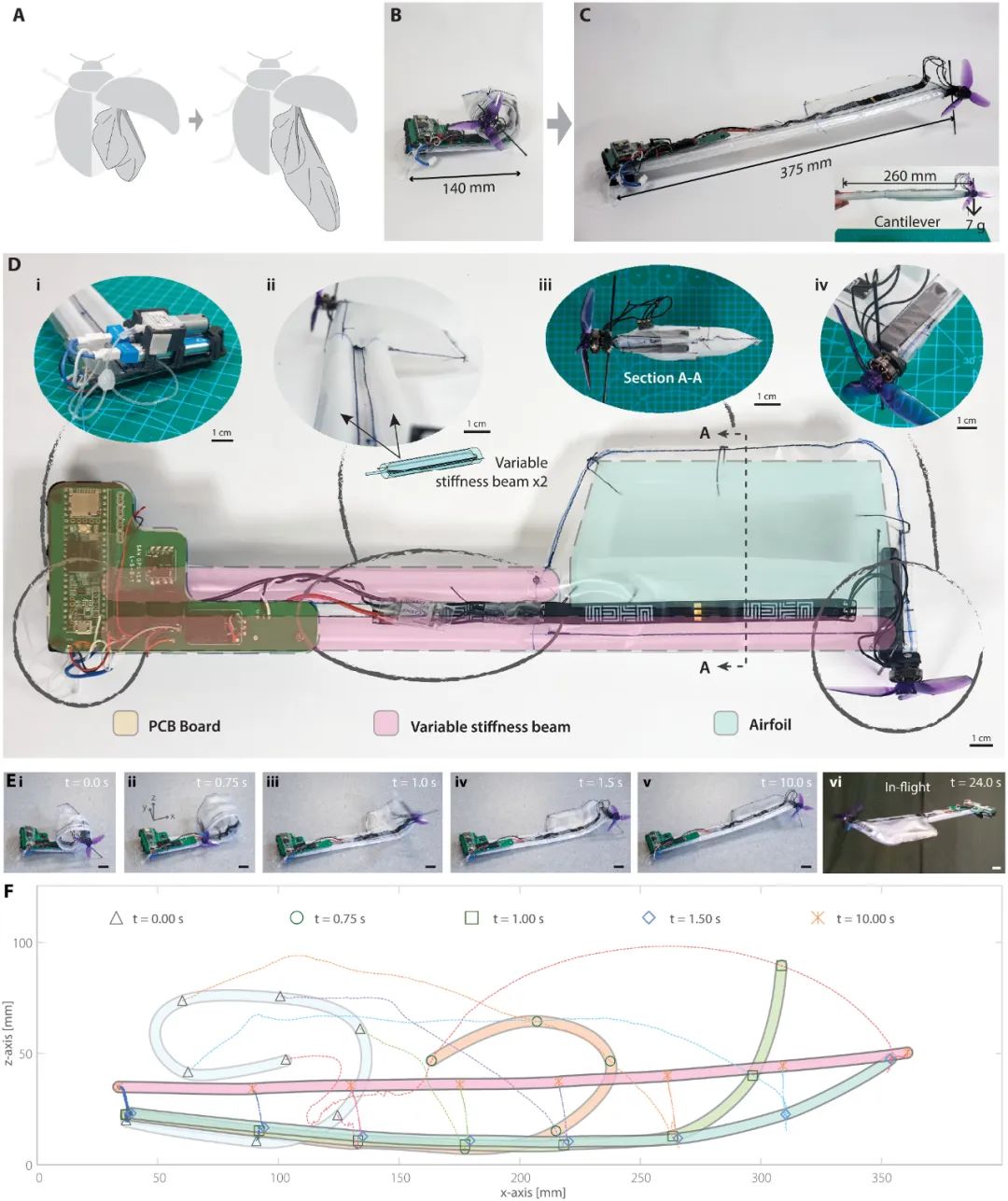
受瓢虫启发而展开的翅膀
受瓢虫启发的飞行机器人采用FiBa可变刚度梁模块作为机翼的主要结构部件。这些模块在充气后产生足够的刚度和强度以支持飞行,同时在未充气状态下可以轻松折叠和卷起,便于运输和储存。机器人还配备了推力装置和控制系统以实现自主飞行和姿态调整。在自然灾害等紧急情况下,这款飞行机器人可以迅速响应,将食品、药品等急需物资精准投送到受灾区域。其可折叠的机翼设计使得机器人在运输过程中占据空间小,便于大规模部署;而自主飞行能力则确保了物资投送的准确性和及时性。在环境监测领域,飞行机器人可以搭载多种传感器和设备对大气质量、水质状况等进行全面监测和数据采集。其灵活的飞行能力和广泛的监测范围使得机器人能够快速覆盖大面积区域并提供准确的数据支持。此外,在农业领域也可用于病虫害监测和作物生长状况评估等工作。
▍结语与未来:
FiBa软执行器的出现标志着软机器人技术的一次重大突破。通过轻质材料的选择和模块化设计的应用,FiBa执行器拥有了轻量化和多功能特性,这一设计不仅解决了传统软机器人的重量问题,还在实际场景中拥有极高的泛化性。未来,研究人员将继续优化FiBa执行器的设计和技术方案,提升其性能与可靠性,此外,随着智能控制和自主导航技术的发展,FiBa软机器人未来有望表现得更加智能化。



