
在工业机械臂和协作机械臂领域,数字模型的应用正日益广泛,尤其在节能轨迹定义、人机协作安全性改进以及预测和健康管理(PHM)算法开发等方面,展现出了巨大的潜力和价值。
然而,现有文献中的简化关节模型,虽可用于评估机器人的宏观行为,却因未充分考虑机器人各子系统及其相互作用的精确描述,而难以满足深入分析的需求。
如果必须插入基于物理的系统故障和退化描述以进行PHM分析,则需要模型的高度细节和保真度,并且应考虑到每个子系统的动态行为和相互作用。
特别是在进行PHM分析时,模型需具备高度细节和保真度,并应全面考虑每个子系统的动态行为及其相互作用。这一现状呼唤着更为精细和全面的模型构建方法。
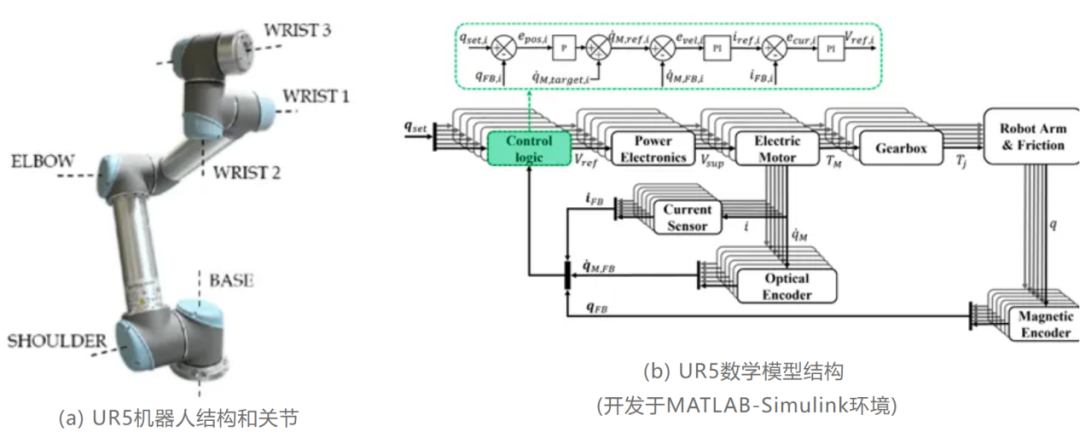
图1 UR5机器人及其数学模型结构
针对这一挑战,意大利都灵理工大学的研究团队等人在《Robotics》期刊上发表了一项重要研究成果。他们以Universal Robots的六自由度UR5协作机器人为载体,建立了一个高保真多体模型。该模型不仅包含对机器人完整动力学的准确描述,还详细模拟了电动机和齿轮箱等关键部件。
为了获得更具物理代表性的运动学校准参数,研究团队引入了Hayati的附加运动学参数来模拟装配误差。
此外,他们还开发了详细的关节模型,以准确模拟每个关节的元件,包括电动机和减速器。在建模过程中,研究团队特别考虑了应变波齿轮动力学模型,并详细描述了其主要元件之间的内部相互作用,这使得模型产生的电流可以与真实机器人的电流进行比较,从而进一步验证了模型的准确性和保真度。
研究的一大亮点在于,通过将机器人关节模型集成到机电致动器架构中,获得了基于物理的关节扭矩描述,这一方法相较于以往文献,能更准确地描述整个机械手的动态行为,并在单个关节的扭矩评估方面表现出色。
通过两种不同的试验轨迹,即动态参数激励轨迹和拾取放置轨迹,研究人员对UR5协作机器人及其数字复制品进行了深入分析。结果显示,模拟扭矩与测试扭矩高度一致,不仅数量级相同,趋势也相似,充分证明了所提出模型能够准确复制真实UR5的实际行为。
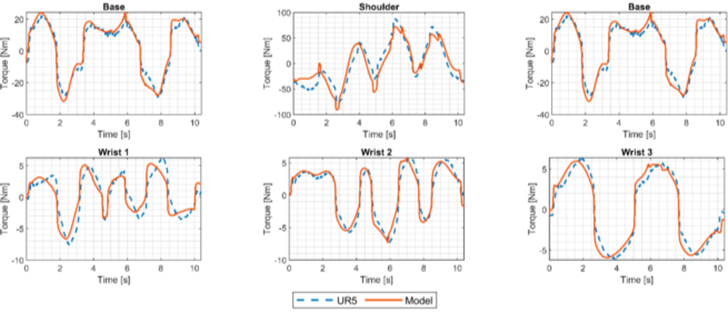
图2 由所提激励轨迹模型估计的和利用Corke模型计算的UR5电机电流产生的关节扭矩比较
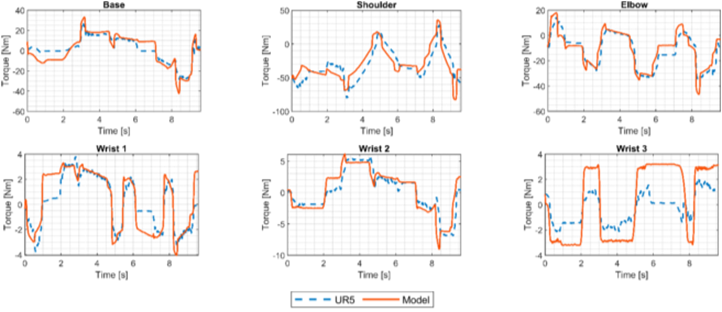
图3 由所提拾取和放置轨迹模型估计的和利用Corke模型计算的UR5电机电流产生的关节扭矩比较
这一成果不仅代表了动态文献模型的创新,还为未来的PHM研究奠定了坚实基础。研究团队计划利用这一高保真模型作为虚拟测试台,生成标称和退化响应的数据集,为更深入的基于模型的PHM调查开辟新路径。
此外,他们还计划进一步改进所提出的应变波齿轮模型,以考虑更多的动态影响,如运动误差、载荷相关扭转刚度及其随时间的相对退化,从而推动该领域研究的持续进步。



