
在适应环境刺激和执行复杂任务方面,小型软体机器人因其多物理场响应能力而具有独特优势。它们为传统刚性机器人领域带来了柔软与灵活性的新选择。然而,目前在这一领域的研究与开发仍面临诸多挑战。
在此背景下,德国马普所联合西安交通大学和北京理工大学的研究团队近日针对这些挑战进行了深入研究,并创新性提出了一种基于激光逐层加工的一体化编程制造策略,以解决微型软体机器人的多物理场响应特性与驱动解耦的问题。
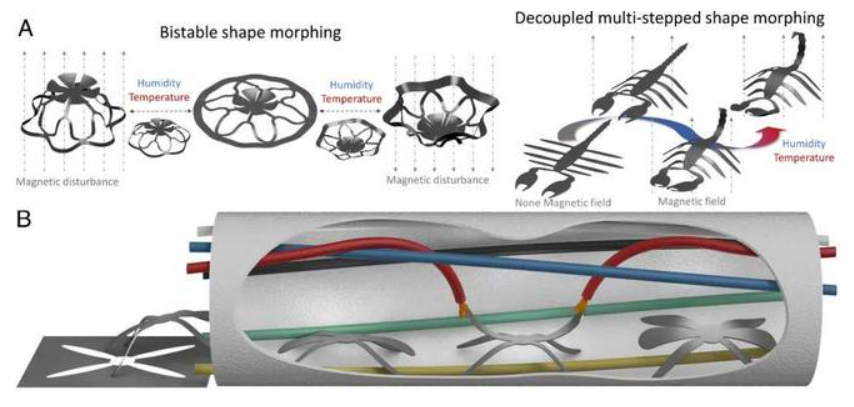
这项研究的创新之处在于,通过对多层异质薄膜材料的选区和逐层加工,实现了微型软体机器人形态的精确控制。采用干凝胶、激光诱导石墨烯和全材料激光图案化等技术,该方法能够创建多种具有复杂三维形态的结构,从而增强了系统的自由度和整体功能。
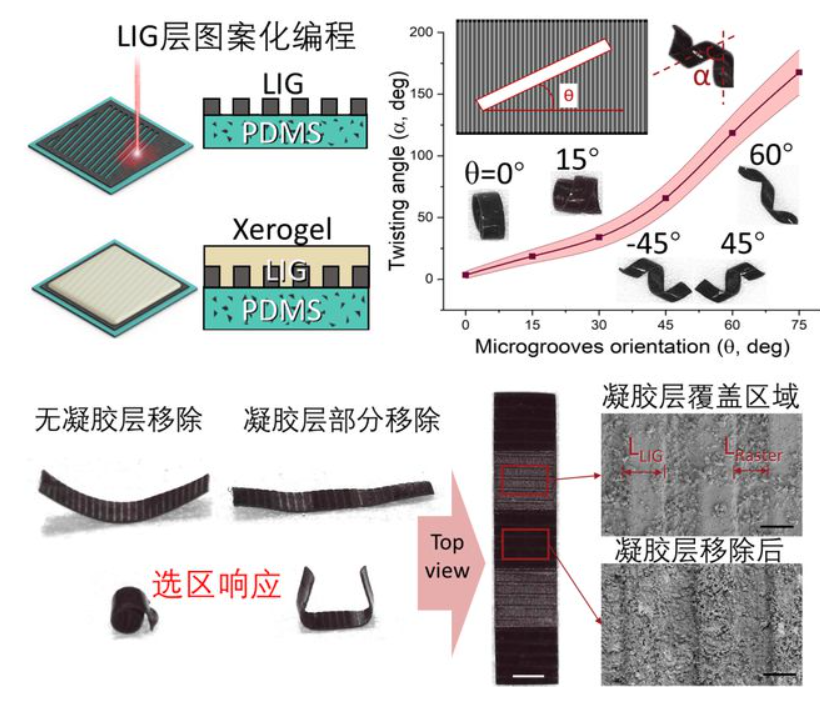
此外,研究团队还开发了异质薄膜结构力学模型,并通过多物理场耦合有限元分析预测和设计形状变形行为。他们成功展示了双稳态结构的连续转变,并演示了类似蝎子运动的形态,为微型软体机器人的智能化和功能性应用提供了新思路。
该研究成果的相关论文已发表在美国《国家科学院院刊》(PNAS)上,获得了同行的一致认可。论文共同第一作者为马普所博士后郑志强博士、西安交大韩捷博士及北京理工大学石青教授。
通过这项研究,我们看到了微型软体机器人在多物理场响应特性与驱动解耦方面的巨大潜力,这将为智能机器人技术的发展开辟新的道路,推动其在医疗康复、人工智能及柔性电子等领域的应用。



