
自然界中的鱼群、蜂群和椋鸟群展现出令人惊叹的自组织蜂拥行为,这种群体协同运动、如液体般流动的能力引起了科学家们的极大兴趣。在此背景下,芝加哥大学的Heinrich Jaeger、James Franck Institute以及Baudouin Saintyves等科学家,运用流体力学的视角,将物理学原理应用于模块化自适应机器人技术的开发,最新推出了名为"Granulobot"的自组织模块化机器人。
Granulobot:连接软机器人技术和活性颗粒材料的模块化平台
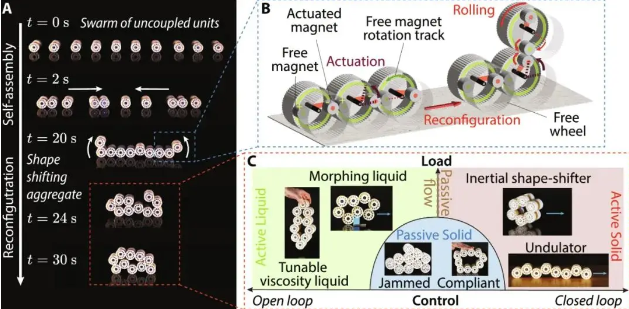
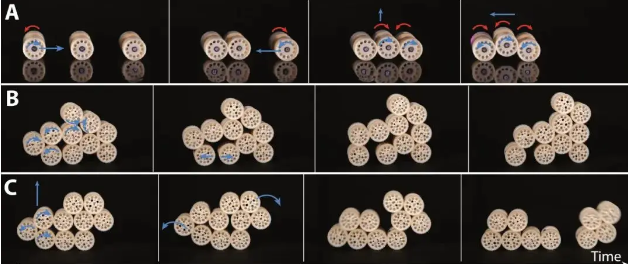
Granulobot是一款拥有出色的分裂、重新组合及重组能力的自组织机器人,可根据环境变化灵活调整自身形态。该机器人的设计受到自然界中蜂群自组织行为的启发,能够在没有组织者的情况下协同运动,展现出类似液体般的流动特性和对环境的快速响应能力。
机器人构造及设计
Granulobot由一组简洁的圆柱形齿轮装置构成,装有两块可绕圆柱轴旋转的磁铁。其中一块磁铁自由转动,另一块由电池供电的电机驱动。这种设计利用磁力实现各单元间的连接,一旦相互耦合,即可推动邻近单元旋转。通过各单元间的相互接触,整体得以协同移动,其行进方式类似于蜂群的运动方式。
自组装、形状变换和动态重构
研究团队表示,Granulobot模糊了软体、模块和蜂群机器人技术之间的区别,展现了其在自组织集合系统方面的独特优势。这项自组织模块化机器人技术是与伊利诺伊理工大学芝加哥分校机械与航空航天工程系教授Matthew Spenko合作开发的,最新成果发表在《Science Robotics》上的论文中。
应用前景及潜力
Granulobot的设计旨在展示团队的模块化自组织方法,未来这些模块可能会非常小,成千上万个单元组成一个整体。此外,Granulobot的设计与大小、温度无关,能够在水下工作、外太空工作,具有广阔的应用前景。
Granulobot将未来在特种领域发挥商用价值
研究人员指出,Granulobot的设计和功能将为未来的特种领域带来革命性的变革,其模糊了物质与机器人之间的边界,展现出了令人振奋的商用前景。
自然界的启发,科学的创新,Granulobot的诞生将为自适应技术和模块化机器人领域带来新的可能性和发展方向。



