
2016年BBC曾播出一部名为《野外间谍》的纪录片,用仿生机器人来观察动物的生活习性,其中一个鳄鱼机器人的画面引发了网友共鸣。这款鳄鱼机器人名叫Krock,可以模仿鳄鱼的身体结构进行左右摇摆行走。时隔七年,该研究团队于《ScienceRobotics》期刊再次发表最新研究进展,推出Krock-2代鳄鱼仿生机器人,并重点应用于特种救援与灾难响应领域。

Krock一代鳄鱼仿生机器人
据了解该团队此前研发的Pleurobot和Orobot两款机器人采用3D打印聚酰胺SLS材质设计,但此前执行器占机器人重量的60%,为此工作人员采用更加轻量化的弯曲金属板甚至使用了碳纤维材质用来减轻鳄鱼仿生机器人本体的重量。
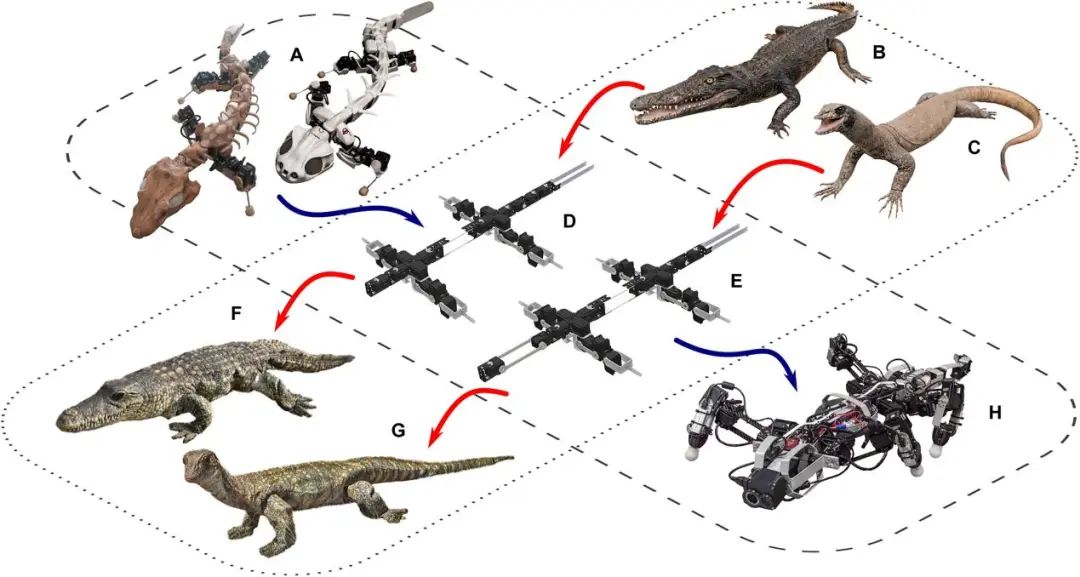
Krock鳄鱼仿生机器人开发模型
在皮肤的设计上,由于BBC电视台介入拍摄纪录片,因此被迫设计成鳄鱼仿生皮肤。工作人员使用了乳胶皮肤用来达到更加逼真的视觉效果,但这一设计也出现了很大的问题。尤其是安装在腰带周围的支撑环以及塞在皮肤下的气泡包装垫阻碍了四肢的活动范围。并增加了电机的重量和负载。此外也极大影响到机器人的散热效率。致使机器人每次工作时间只有15至20分钟,之后进行冷却休息。此外密闭性的问题也没有得到很好的解决。
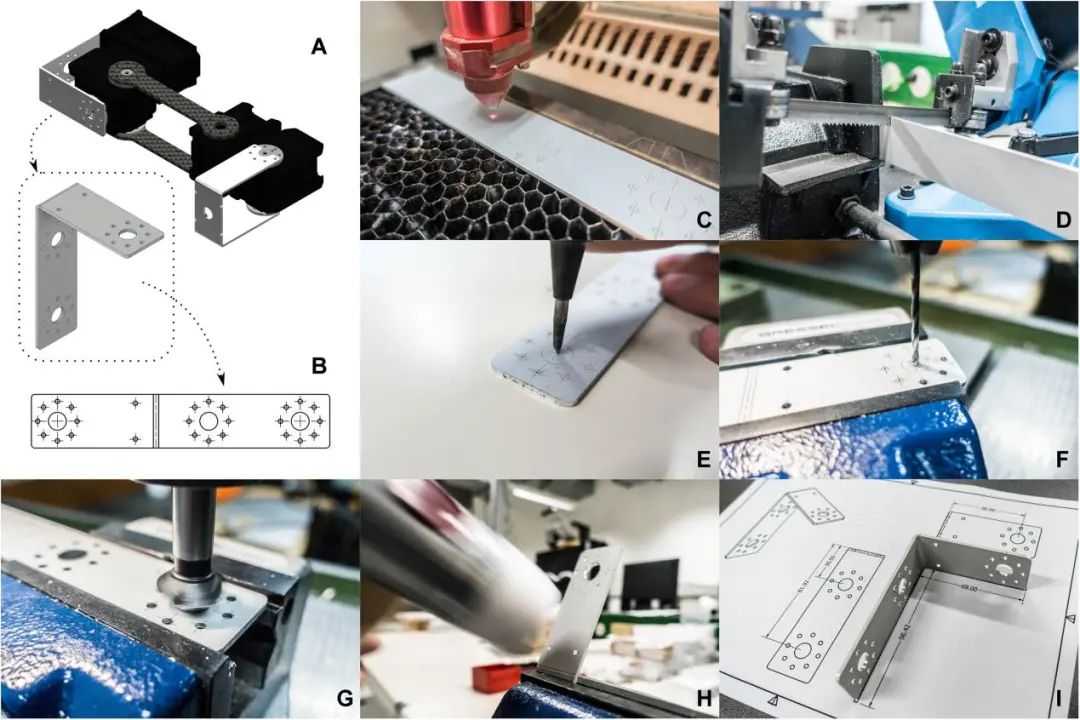
Krock机器人采用模块化设计可快速建造
时隔七年,Krock-2代鳄鱼仿生机器人诞生,与我们此前看到的第一代产品不同,没有了BBC 纪录片所需的美学要求,不必追求节目效果设计成乳胶皮肤,Krock-2代鳄鱼仿生机器人的外观显得更加接地气,采用了成本更低的专业定制的防水服、防水拉链以及弹性织物垫组成。这种结构设计,不会影响到机器人的运动能力,反而更容易穿脱,相比较此前乳胶打造的仿真鳄鱼皮肤,新型防水服的设计仅有300克,重量减少10倍。
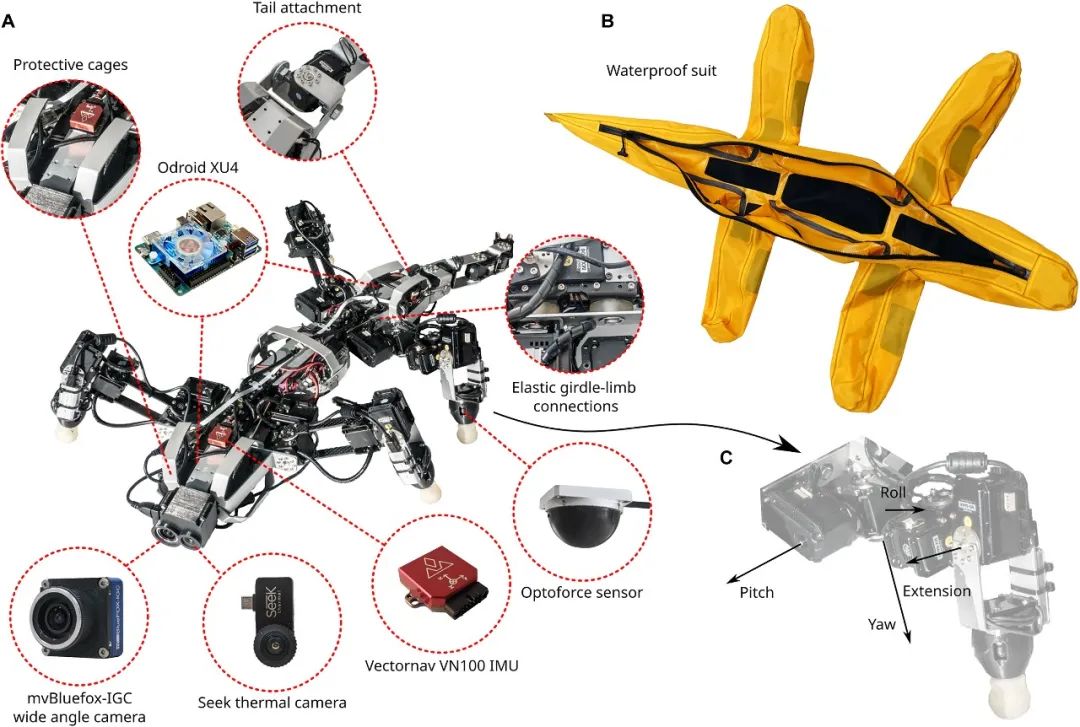
Krock-2代鳄鱼仿生机器人采用专业定制的防水服设计
Krock-2代鳄鱼仿生机器人测试场景
为了改善尾部平滑的波动弯曲并在每次划水时正确释放尾流,团队研究人员选择使用被动塑料鳍,该鳍放置在防水服外部并延伸其可选的可拆卸尾部。该套装覆盖了尾部的远端执行器,并提供了与塑料鳍的牢固连接。鳍可以根据任务进行设计,并且由于它位于防水服外部,因此可以在行走时在地面上拖动,而不会因磨削而对皮肤造成损坏。
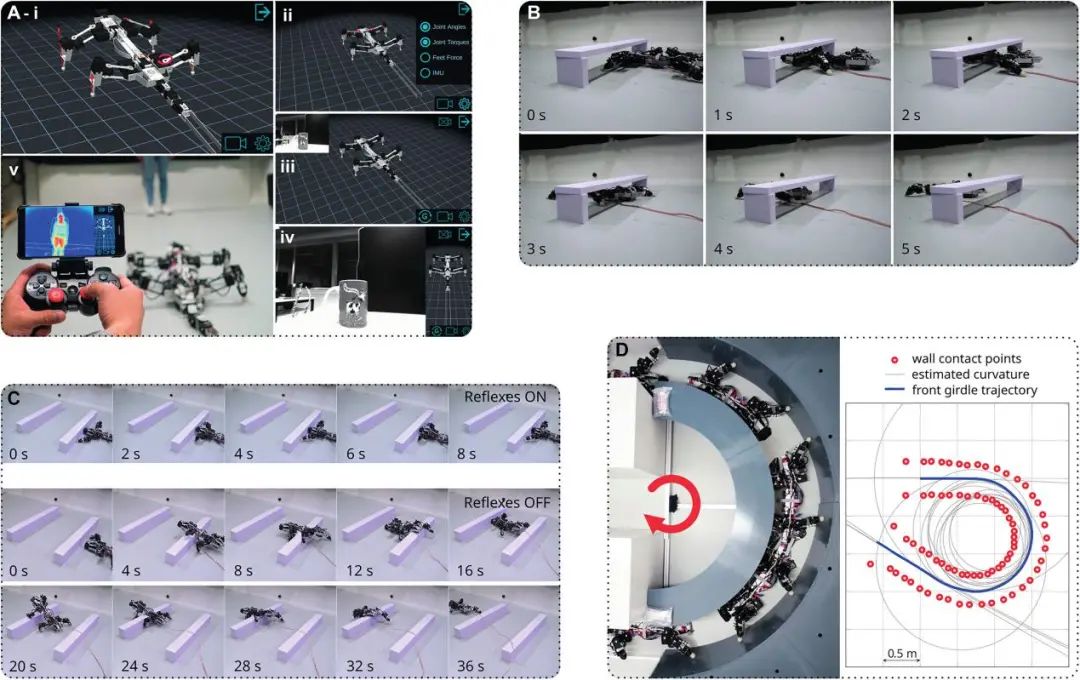
Krock-2代鳄鱼仿生机器人原型机在狭小空间中进行作业
基于特种救援工作场景的需要,Krock-2代鳄鱼仿生机器人将在碎片和狭小空间中进行作业,Krock-2 的腿部被设计为具有更大的运动范围,并且具备后退行走能力,在水中游动也能穿梭自如。
值得一提的是,该团队强调,Krock-2代鳄鱼仿生机器人是基于原有 Krock平台模块化的设计方式打造,虽然增加了传感器数量以及更换了防水皮肤,但并没有影响机器人的便携性。并且拆卸之后可以轻松装进30升的背包当中。
Krock-2代鳄鱼仿生机器人具备非结构化环境的通行能力
在实际操作部分,Krock-2代鳄鱼仿生机器人采用手动控制,通过使用游戏手柄对机器人进行远程操控连接,同时搭载可视化模块用来评估机器人所在状态。Krock-2代鳄鱼仿生机器人采用两个机载摄像头(广角和热成像),使操作员能够分析操作场景,同时也符合态势感知和遥感的要求,尽管整体重量有所增加,但依然具备良好的鲁棒性,即便是在机器人因外部环境导致翻转,也能通过倒置操作来继续实现工作。
Krock-2代鳄鱼仿生机器人可实现倒置操作
研究人员表示,目前Krock-2代鳄鱼仿生机器人搭载的相机不仅可以用于拍摄,还能用于导航。此外通过配备热成像仪,能够使它进入黑暗环境并由热点(例如煤气泄漏、火灾、辐射、动物或人体)引导。集成到其脚部的力传感器能够实现控制反射,帮助机器人通过或爬过其路径中的大型障碍物,力传感器还使机器人能够在移动时触摸其环境并创建3D地图,即使穿着防水服也轻松执行救援任务。未来,Krock-2代鳄鱼仿生机器人将通过搭载更多架构附加组件实现更为重要的灾难响应的场景应用。
初版Krock鳄鱼仿生机器人得到了BBC 制片人John Downer Productions的资金支持,目前该项目已获得瑞士国家科学基金会(国家机器人研究能力中心)的支持,同时KM-RoBoTa也为该团队提供了额外的资金帮助。
扩展阅读:
https: //km-robota.com/pubs/krock。
编程代码和机械图纸开源:
https: //doi.org/10.5281/zenodo.10060155
----------------END-------------------



