


人形机器人是一种将人工智能技术和机器人技术相结合的高科技产品,被广泛应用于家庭、商业和工业等领域,人形机器人是智能机器人中研发难度最大、技术壁垒最高的产品,是体现一个国家科技发展水平的重要标志。
2023年10月,国家工业和信息化部印发《人形机器人创新发展指导意见》(以下简称《意见》)。《意见》的第一句话就开宗明义:“人形机器人集成人工智能、高端制造、新材料等先进技术,有望成为继计算机、智能手机、新能源汽车后的颠覆性产品,将深刻变革人类生产生活方式,重塑全球产业发展格局。”
从1969年日本早稻田大学加藤一郎实验室研发出第一台双足人形机器人,实现了人类梦寐以求的机器人梦想,作为机器人的最高级形态,是衡量科技创新和高端制造业水平的重要标识。我们通过查阅大量文献资料,盘点全球人形机器人团队及公司。

01
日本早稻田大学加藤实验室
早在1964年早稻田大学就开始了机器人制造和使用的研究,特别是“日本机器人之父”加藤一郎教授创立的加藤实验室对于两足机器人的研究更是对机器人的发展做出了卓越的贡献。
1967年,实验室启动了极具影响力的WABOT项目,1972年,世界上第一个全尺寸人形“智能”机器人WABOT-1诞生。
WABOT-1身高约2m,重160kg,包括肢体控制系统、视觉系统和对话系统,有两只手、两条腿,胸部装有两个摄像头,全身共有26个关节,手部还装有触觉传感器。它可以进行简单日语对话,可以搬运物体行动。据悉,WABOT-1行动能力约与一岁半的婴儿几乎差不多。尽管行走一步需要45秒,步伐也只有10cm左右,尤其身形巨大显得相当笨重,但在当时这个技术,已震惊了全世界。
加藤一郎研究室于1984年推出擅长艺术表演的WABOT-2。WABOT-2可以日语自然对话,还能用眼睛看乐谱,用手脚灵活地演奏电子琴,具有演奏中级难度音乐的能力。另外,它还能够识别歌声,自动进行转录,或在此基础上根据人的歌声进行伴奏,机器人的实力惊人。
02
日本本田公司
本田汽车公司是全球著名的汽车制造商之一,总部位于日本东京,由本田宗一郎于1948年创立。从1986年开始,日本本田公司开始研发人形机器人,相继推出双足机器人E系列、仿真机器人P系列。
2000年10月,仿真机器人P4(ASIMO)问世。但其技术积累则要从1986年阿西莫机器人的初号机E0开始算起。随后在2006年和2011年又进行了两次代际升级,大致包括从身高120cm到了130cm,体重逐步下降到48kg,行走速度则稳步提升到9km/h,全身57个关节,能实现小跑、单脚跳、上下楼梯以及踢足球等系列复杂运动。

由于ASIMO开发成本昂贵(造价高达300-400万美元)一直无法商业落地,因此2022年3月底,本田公司选择让ASIMO退役。本田致力于研发具备看护、护理等功能更为实用的机器人。
2017年,本田公司推出新一代人形机器人E2-DR,定位灾难援助。该机器人身高168cm,体重85kg,全身总共33个关节,面对不同地形采用相应的行走模式,可以变形成大猩猩模式通过路障和竖直楼梯,也可以匍匐前进通过狭小低矮空间,具有很强的环境适应能力。另外机器人可以在26mm/h的降水量下行走20 min,正常情况下则能够以2km/h的速度行走,甚至可以在零下10至40°C环境工作,1000Wh的电池则可以提供约90min续航力。
03
美国波士顿动力公司
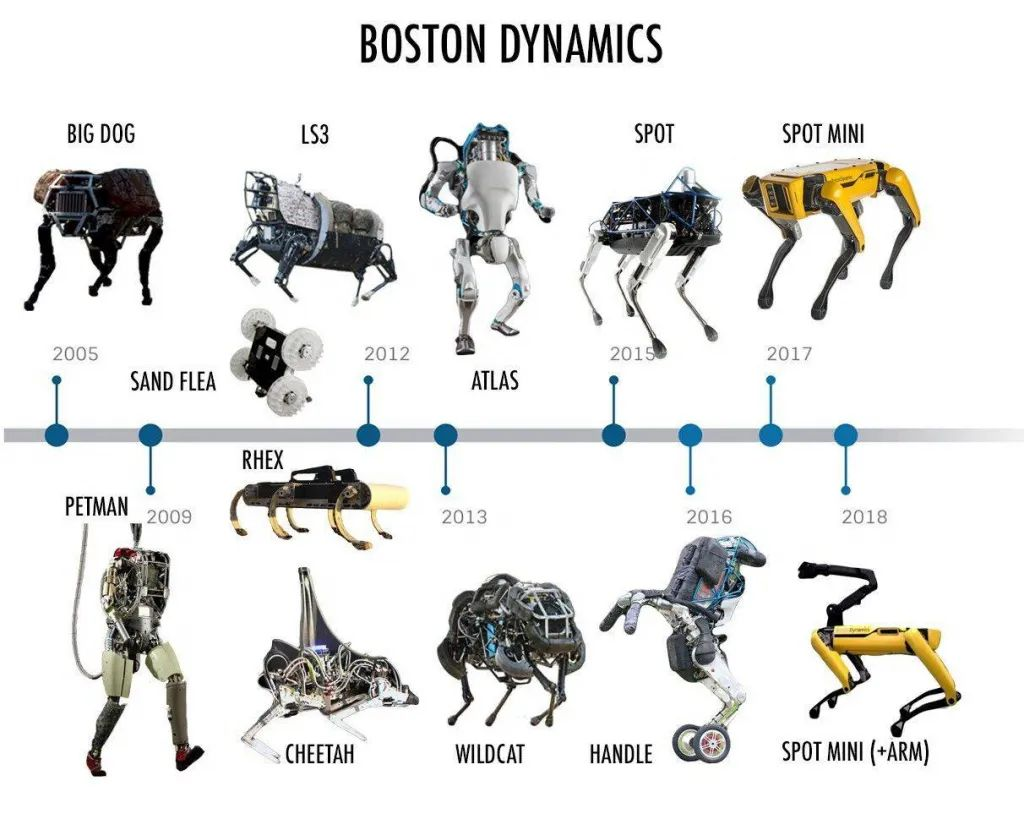
波士顿动力是一家成立于1992年的工程和机器人设计公司,由该公司的前身是麻省理工学院的机器人实验室,其研究方向主要涉及人形机器人、移动机器人以及机器人控制等技术领域。总部位于美国马萨诸塞州沃尔瑟姆,创始人Marc Raibert。2013年波士顿动力被Google X Robotics收购,2017年以1.65亿美元的价格卖给了日本投资巨头软银,2020年12月又再次被韩国现代汽车集团收购80%的股份,日本软银仅持有剩余的20%。
从2009年,该公司开始研发PETMAN人形机器人,主要用于测试个人防护装备在危险化学环境中对人的影响。Petman灵活度较高,即使受到冲撞也能保持直立,行进速度能达到5.1km/h,几乎和有血有肉的真人无异。
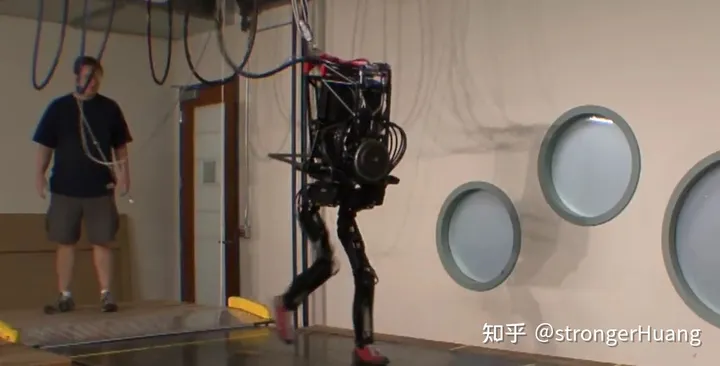

Atlas原型机最早于2009年亮相,2013年7月11日向公众正式公开。Atlas机器人身高188cm,体重150kg,其设计目的是为了搜索和救援任务。2016年,波士顿动力在视频网站上发布了新一代的Atlas机器人,这一代机器人身高175cm,体重81.6kg。2018年,波士顿动力进一步对机器人进行了优化设计,最新身高1.5m,体重80kg,全身具有28个关节,速度能达到1.5m/s,能完成快速小跑、三级跳、后空翻和空中体操等一些列复杂动作。
2019年,该公司推出了Spot,这是一种类似狗的四足动物,配备了全方位的传感器和数据采集设备。Spot可用于自动化已知环境的常规检查或探索未知区域。
04
美国特斯拉公司
特斯拉是一家美国新能源汽车和能源存储设备的生产与销售公司,总部位于加利福尼亚州帕洛阿尔托市,由埃隆·马斯克(Elon Musk)创办于2003年。

马斯克此前曾表示,特斯拉机器人最初的定位是替代人们从事重复枯燥、具有危险性的工作,批量生产时每台机器人的成本将低于2万美元。
2022年10月,人形机器人擎天柱(Optimus)正式亮相。Optimus高1.73m,重56kg,可拿取约20kg重的物品,行走速度8km/h。据介绍,Optimus的大脑采用特斯拉的超级计算机系统Dojo,拥有超强的计算能力;视觉感知系统主要基于特斯拉FSD的计算机模组和方案,面部配备8个汽车同款Autopilot摄像头,最远监测距离可达250米;运动则是主要靠脖子、手、腿以及躯干等搭载的40个机电传动器,其中手部的12个机电传动器,能够让机器人达到接近人类灵活水平。
05
英国Engineered Arts公司
Engineered Arts于2004年10月由Will Jackson创立,是英国的人形娱乐机器人的设计者和制造商。
2021年Engineered Arts推出了机器人Ameca,号称世界上最先进的人形机器人。Ameca重49kg,高1.87m,全身共有52个模块,支持51种关节运动。它不仅能够与人进行对话,还有着极其丰富的表情,甚至有着细致的动作和微表情,就像是一个真正的人类一样。

Ameca的强大功能依靠的是机器人操作系统和Mesmer技术。一方面Mesmer通过对真人的3D内部扫描,为Ameca提供准确的人体骨骼结构、皮肤纹理和表情,另一方面作为控制平台驱动Ameca的每一个硬件。当然它也配备了许多的传感器、摄像头和麦克风等设备以确保它的可交互性。
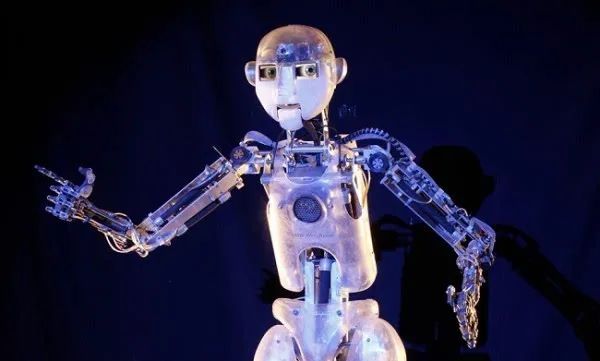
Engineered Arts公司推出的的另一个人形机器人是RoboThespian,它是为了在公共场合与人类进行互动而开发。它熟悉多种语言,具有多种娱乐功能,并且可以和人类进行良好的交互。RobotThespian目前已经在许多科技中心、旅游景点、以及商场等进行了试点使用。
06
中国香港Hanson Robotics公司
汉森机器人公司(Hanson Robotics)于2003年成立于美国,由大卫·汉森 (David Hanson)创立。公司纳米技术皮肤“Frubber”可以模仿人体肌肉,使得机器人表现出高品质的表达和交互性,模拟人性面部特征和表达。2014年,Hanson Robotics将其总部从美国搬迁至香港沙田。到目前为止,该公司已通过四轮融资筹集了约2170万美元,投资方包括迪士尼加速器和ACE公司。
该公司最具代表性的机器人便是索菲亚,索菲亚2017年由沙特阿拉伯授予公民身份,开创历史先河。索菲亚看起来就像人类女性,拥有橡胶皮肤,能够表现出超过62种面部表情。索菲亚“大脑”中的计算机算法能够识别面部,并与人进行眼神接触。
07
日本软银机器人公司
2014年,软银机器人公司推出了Pepper,这个4英尺高的人形机器人安装在轮子上,便于移动,是世界上第一个拥有面部识别技术的社交机器人。Pepper能够主动与人互动,可以使用15种语言进行对话,包括英语、阿拉伯语、法语和西班牙语,还能识别并对人类的基本情绪做出适当的反应。自推出以来,Pepper已经被世界各地成千上万的企业和组织作为一个可靠的助手,引导员,向导和礼宾代理。

其母公司软银集团是仅次于丰田的日本第二大上市公司,也是世界上最大的上市公司之一。软银机器人公司在东京、上海、旧金山、波士顿和巴黎设有办事处,据悉,软银机器人公司已经从一轮融资中获得了2.63亿美元的资金。
08
美国加利福尼亚大学洛杉矶分校(UCLA)
UCLA机器人与机械实验室(RoMeLa)的研究人员设计了一种命名为ARTEMIS的人形机器人,其基于通用类人机器人打造,采用了增强机动性和提高稳定性的先进机器人技术,身高141 cm,体重38.5kg,其最快行进速度可达2.1米/秒,并且能够适应在不同路面上行走,是全球奔跑速度最快的双足机器人。
ARTEMIS是电力驱动的,而非液压控制的,电驱机器人产生的噪音更小,运行效率更高、更清洁。
Dennis Hong是UCLA的机械和航天工程学院的教授,机器人实验室Romela的负责人。该实验室产品线众多,其中包括OmnUR全向独轮车机器人、ICARUS集成概念空地机器人无人系统、微型机器人LARA自动化机器人助手、DanTE动态拟人触觉末端执行器、BEAR可反向驱动的电磁执行器、THOR-RD战术作业危险行动机器人、CHARLI自主学习能力的人形机器人、MARS六足机器人平台、HyDRAS蛇形机器人以及RAPHaE气动机械手等,几乎覆盖了从人形机器人整机产品到核心零部件。
09
西班牙Macco Robotics公司
Macco Robotics成立于2013年,是一家专注于为食品、饮料和酒店行业构建创新解决方案的科技公司。

KIME是Macco Robotics的人形机器人调酒师,提供啤酒、咖啡、葡萄酒、小吃、沙拉等。每个 KIME 售货亭每小时能够分发 253 件商品,并具有触摸屏和支持应用程序的订购功能,以及内置的支付系统。
10
美国Agility Robotics公司
Agility Robotics是从俄勒冈州立大学工程学院拆分出来的机器人公司,成立于2015年,其创始人是Damion Shelton和Jonathan Hurst。Agility Robotics专注于为各种现实世界的应用设计和建造完全铰接的机器人,曾经获得过美国国防部高级研究计划局的资助,在2020年被福特公司收购。公司于2017年推出了第一个双足机器人Cassie,随后于2020年推出了更像人类的Digit。

Digit拥有一个蒂凡尼蓝色的胸部和两个方形的眼睛灯,身高约1.75m,重65kg,相当于中等男子的身材,最多可承载16kg。Digit可以行走、跑步、爬楼梯、感知环境和手动搬运负载。作为一个完美的仓库助理,Digit的全天候能力也使其能够在户外服务。
去年4月,Agility Robotics完成1.5亿美元的B轮融资,由知名风险投资基金DCVC和“安卓之父”Andy Rubin创建的Playground Global领投,亚马逊产业创新基金等跟投。
Agility Robotics正在美国俄勒冈州塞勒姆建造一座占地7万平方英尺的“RoboFab”制造厂,该工厂每年可生产1万多台Digit人形机器人,据悉,工厂预计将于2024年开始向客户供货,2025年开始全面上市。
11
日本丰田研究所
丰田研究所(TRI)是全球公司的研发企业,专注于人工智能和机器人技术。TRI由美国著名机器人工程师JamesJ.KuffnerJr于2016年创立。
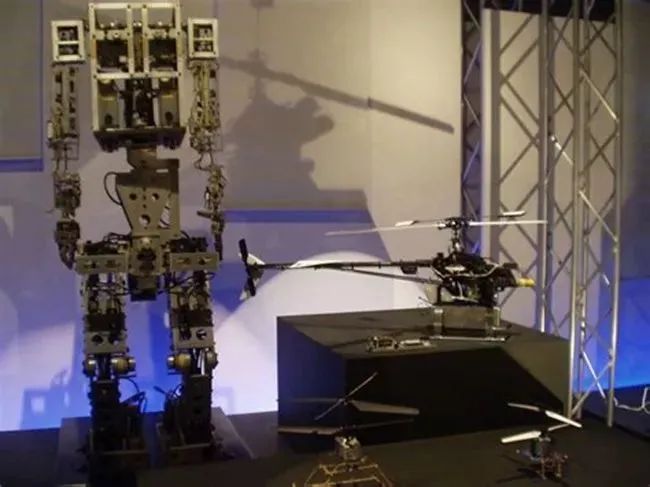
在2017年,丰田公司推出了远程控制机器人T-HR3,该机器人高约1.5m,重达75kg,全身32个关节和双手10根手指都可以随意运动,用户通过佩戴机器外骨骼、HTC Vive头显和Vive Trackers,并借助主操纵系统(Master Maneuvering System,MMS),即可将人体的动作精准地映射到机器人上,从而实现机器人与用户的动作同步。此外,用户还能借助机器人的眼睛和双手,来感知周围环境。T-HR3能跟着我们完成各种动作可以远程复制连接的人的动作。为太空旅行设计的T-HR3的后续版本使用5G技术进行远程控制,最远可达10公里。T-HR3是一种双足类人型机器,头部装有传感器,四肢完全铰接。

TRI2021年研发出最新一代家庭保姆机器人Busboy,Busboy运用了更加高级的AI和机器学习技术,能够“感知场景的3D几何形状,同时也检测物体和表面”。这种组合使研究人员能够使用大量的合成数据来训练该系统。目前,TRI的系统可以成功地执行约85%相对复杂的人类级任务,每个任务由大约45个独立的行为组成。

12
挪威1X Technologies公司
1X Technologies是一家成立于2014年的人形机器人公司,使命是创造与人类并肩工作的通用机器人,以满足全球的劳动力需求。
1X Technologies目前的旗舰产品是名为EVE的类人机器人,EVE拥有两臂、两眼和四轮底盘,可以像人类一样与其环境进行交互,在各种环境中执行多种任务,如巡逻、监控、搬运等,适合在劳动力短缺的市场中使用。
2022年,公司首次取得商业突破,签署了至少140台EVE机器人的分销合同,为美国商业场所提供安保服务。

NEO是1X Technologies正在研发的双足人形机器人,它完全按人类的外形和运动方式设计:NEO有头、身体、手臂和腿,会走路、抓东西,并通过面部表情沟通。
NEO的高精度运动基于模仿人类肌肉模式而设计,使其能够如同人类一样行走、抓取物品并与环境互动。其AI设计使其能够自然地与用户交流,目前,NEO不仅可以自然准确地穿门、爬楼梯,在OpenAI的软件加持下有望完成更多高难度任务。

公司今年完成了2350万美元的A2轮融资,由Open AI创投基金领投,其他投资者包括老虎环球基金和一个由Sand water、Alliance Ventures和Skagerak Capital等挪威投资者组成的财团。公司表示将利用这笔资金来加大即将推出的双足机器人模型NEO的产量,同时扩大其在挪威和北美的首款商用机器人EVE的生产规模。
13
美国Apptronik公司
Apptronik公司由得克萨斯大学奥斯汀分校人形机器人实验室的团队2016年创立,于今年8月公布了一款通用人形机器人Apollo,身高1.75m,体重约75kg,能够举起25kg的重量,可以在室内或室外不受束缚的情况下工作22个小时。

事实上,Apollo的前身是Apptronik与NASA于2013年合作设计的另一款机器人——Valkyrie。
14
美国Figure公司
今年5月,初创公司Figure公司获得了由 Parkway Venture Capital 领投的 7000 万美元的首轮外部融资,用于打造通用型人形机器人,从仓储到零售都可以应用。
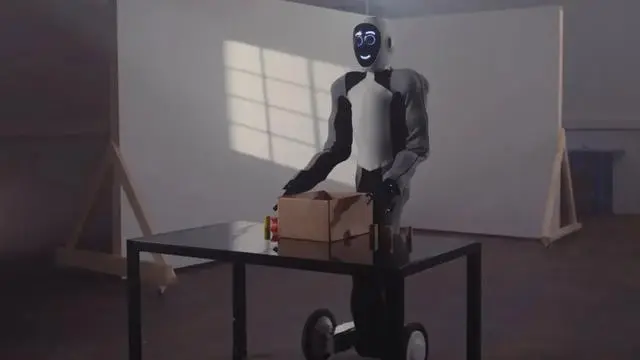
Figure发布了一段视频,视频中向大众展示了其名为Figure 01的人形机器人首次公开迈出第一步。该机器人设计主要是用于执行苦力劳动,例如搬运重物,最终解决美国的劳动力短缺问题。这款人形机器人模仿人体形态,目的是完成人们不想做或无需技能的工作,并最终可以帮助人类解决更高级的任务,如照顾老年人甚至烹饪餐点。
15
加拿大Sanctuary AI公司
Sanctuary AI成立于2018年,创始人Geordie Rose是连续创业者,曾创办了世界上第一家量子计算公司D-Wave。Sanctuary AI 旨在创造世界上第一个具有类人智能的通用机器人,现已推出名为Phoenix的第六代通用双足人形机器人。该机器人身高144cm,体重70.3kg,最大有效载荷为24.9kg,最高速度为每小时4.8公里,搭载业界领先的机械手,具有20个自由度,可与人手的灵活性和模仿触觉的专有触觉技术的精细操作相媲美。Phoenix可以被远程操控或由人监督,并旨在与人类一起接受培训和工作。

16
日本大阪大学石黑浩教授团队
日本大阪大学教授石黑浩在2000年开启了高仿真机器人项目,并在当时设计了一款在轮式平台上搭载可移动钢制手臂的机械装置,而这一设备受到了实验者的排斥,石黑浩开始意识到机器人还是应具备人的外表才能更好地与人类交互情感,于是他开始研究超仿真机器人,代表作为ERICA。
除了外形与人类相差无异的外表,石黑浩还赋予了Erica先进的人工智能语音系统,通过多名声优录制的声音,调制出了Erica独特的音色,可以运用于新闻播报,语音朗读,如果内置Erica的语音系统在汽车上,还能在驾驶途中进行对话,指令操作等。

17
德国卡尔斯鲁厄理工学院(KIT)
KIT是由原卡尔斯鲁厄大学和原卡尔斯鲁厄研究中心合并而成。KIT研发出了ARMAR协作机器人,旨在帮助人类对仓库的自动化系统进行维护。ARMAR-6装备了:两个8自由度手臂,带位置和扭矩传感器; 手腕上有两个6自由度力矩传感器;两个欠驱动的五指手;灵活的移动平台;伸缩躯干关节;头部有2自由度,装有两个立体视觉系统和一个RGB-D传感器;集成传感器-执行器-控制器单元。ARMAR-6能够使用钻头、锤子和其他工具,通过采用人工智能技术,使其能够学习如何抓取物体并将它们交给人类同事。它还能够承担擦拭表面等维护职责,甚至能够在需要时寻求帮助。

18
美国Beyond Imagination公司
美国Beyond Imagination公司开发了搭载AI的机器人“Beomni 1.0”,
BEOMNI 1.0没有双足,依靠4个轮子移动,通过Wi-Fi和5G远程控制,每只手臂最多可举起 15.88 kg的行李,手臂和上半身可以由人类通过VR遥控控制。机器人配备有立体视觉设备,戴上VR手套和耳机,你能看到和听到机器人所处的环境。
19
新加坡南洋理工大学(NTU)
2017年,新加坡南洋理工大学的教授Nadia Thalmann以自己为模型开发出人形社交机器人Nadine,它具有逼真的皮肤、头发、面部表情和上半身动作,能够在各种环境中工作。据研究人员称,Nadine可以识别面孔、语音、手势和物体。它甚至具有一个情感系统,可以模拟Nadine的个性、情感和情绪。

NTU在2022年8月设立了先进机器人技术创新中心,研究人员将开发以人为本的机器人技术和自主系统技术。这些技术将被应用于物流、制造业和老年人护理领域。
20
伊朗德黑兰大学
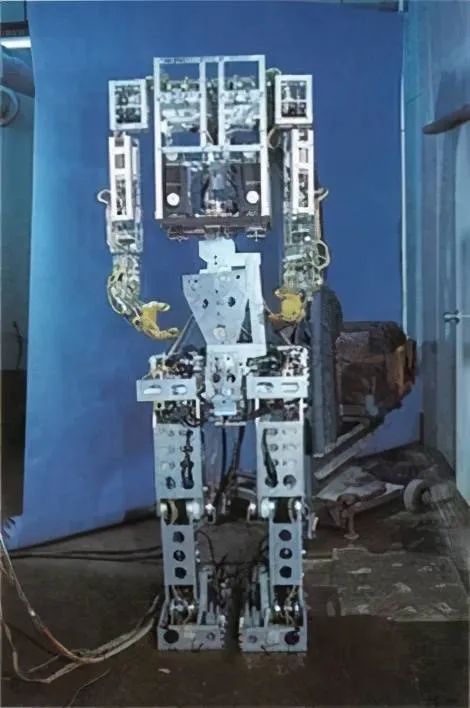
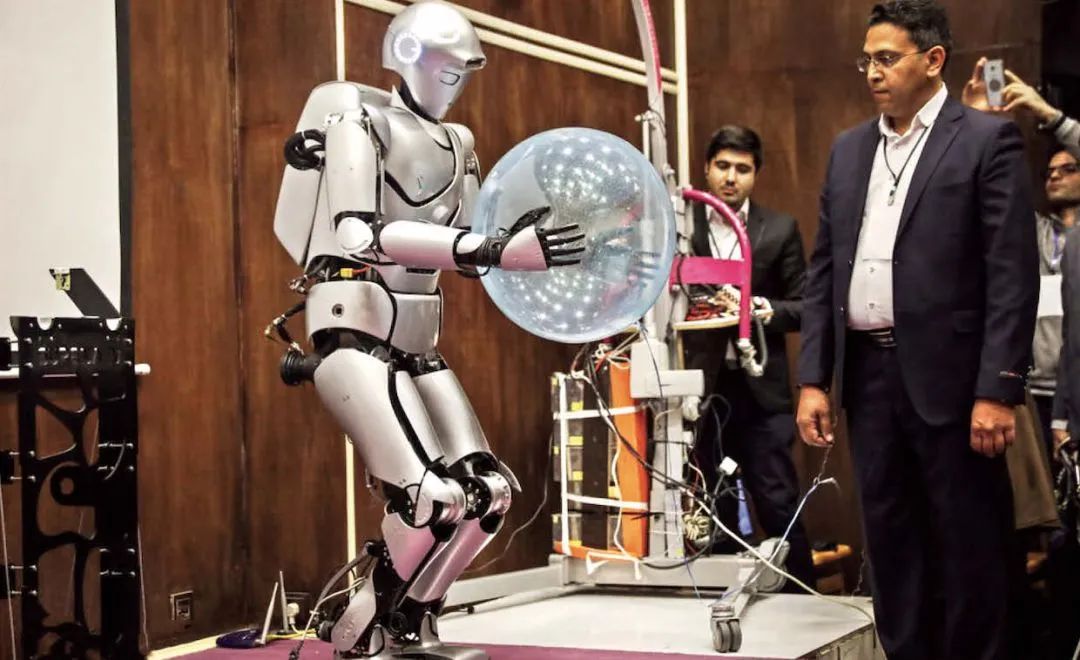
德黑兰大学先进系统和技术中心(CAST)的机械工程师们在机械工程教授Aghil Yousefi-Koma博士的带领下,自2010年以来一直从事Surena系列机器人研究,已经经过了四代的更迭。
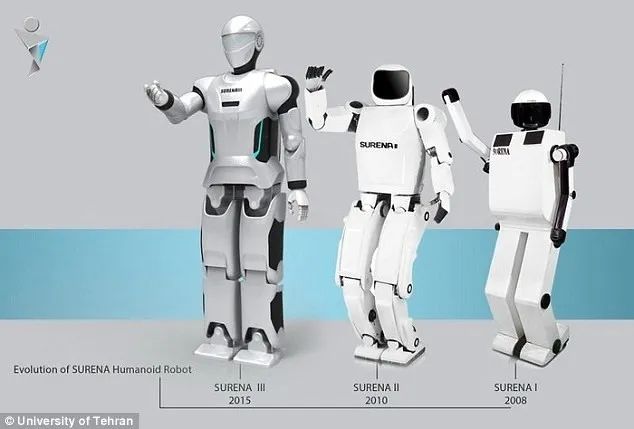
最新版Surena IV身高1.7m,重68kg,它能够进行面部和物体检测、语音识别和生成,并能以0.7km / h的速度行走。它有43个自由度,灵巧的双手可以抓取许多不同的形状。
21
美国通用公司

通用公司在NASA资助下开发人形航天机器人Robonaut2,该机器人主要用于航空作业以及汽车制造业。Robonaut2可以在太空和工厂车间与人类一起工作,能举起44kg的物品,大约是其他灵巧机器人的4倍。2011年,Robonaut2成为第一个进入太空的人形机器人,并在国际空间站担任助手,直到2018年返回地球进行维修。
22
越南科学院物理研究所
越南科学院物理研究所吴孟田博士团队成功制造出智能人形机器人IVASTBot,开启了机器人在通信领域的研究和应用。

IVASTBot高160cm,重50kg,底座尺寸为50cmx 50cm。机器人手臂有3个自由度和一个腕关节,而它的躯干有2个自由度。底座配备4个直流伺服电机和4个方向轮,可实现多向运动。头部有2轴运动,并配备了摄像头,用于在人类交互过程中进行图像识别。IVASTBot具有自主功能、避障能力,并能用简单的句子用越南语进行基本的交流。
23
西班牙PAL Robotics公司
西班牙PAL Robotics公司创立于2004年,扎根于自主移动机器人开发和研究,先后推出了REEM-C和TALOS两款商用仿人机器人。


其中,REEM-C身高160cm,重量80kg,全身44个自由度,行走速度2.5km/h,具备操作、导航与人机交互功能;TALOS身高175cm,体重90kg,行走速度3km/h,是面向工业应用设计的人形机器人,可在恶劣环境下执行体力要求高且准确的任务可适应不平整路面和台阶,能完成钻孔和拧螺丝等任务。该人形机器人装配了两片Intel i7芯片、RGB-D摄像头、2个扬声器和32个自由关节。它的每个活动关节都装配了扭矩感应器,并控制每个关节的扭矩,这让它能实现强大的感应和多接触运动。
24
俄罗斯Promobot公司
Promobot公司2015年成立于俄罗斯彼尔姆市,是自动服务型机器人制造商。Promobot机器人在世界37个国家从事管理员、促销员、导购、导游和迎宾员的工作,对“真人员工”进行了代替或补充。
Promobot曾用真人脸孔打造极为拟真的“人形机器人”。

25
俄罗斯 “人形机器人”科研生产联合体
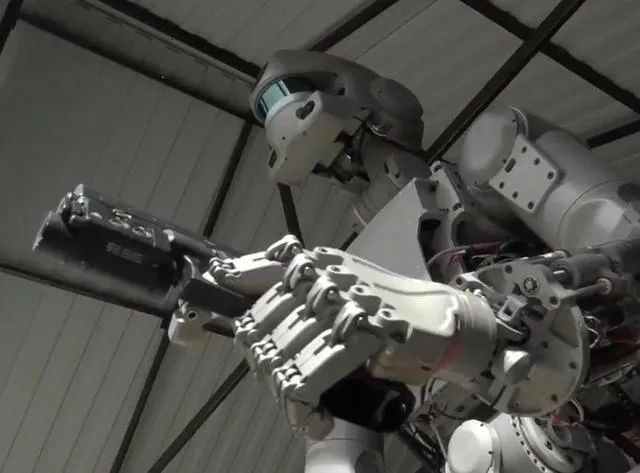
Fedor系列机器人始于2011年,由“人形机器人”科研生产联合体参与研发,俄罗斯联邦紧急情况部支持,当时本打算将其运用于救援等工作,研制成果有Fedor-400、850等,后来才将任务扩大到太空。
Fedor-850高1.8m,重160kg,采用了人工智能技术,拥有学习能力,本身可以执行一些诸如搬运东西、走平衡等任务,它也能通过预定程序执行任务,还能通过后台远程遥控。在2019年8月, Skybot F-850到达国际空间站,并参加了一系列科学实验。
26
日本东京大学
东京大学有号称日本最强机器人实验室的JSK实验室,由稻叶雅幸在内的数十位研究人员组成,研究内容几乎涵盖了所有智能机器人的研究,包括机器人视觉、驱动、外骨骼等等。
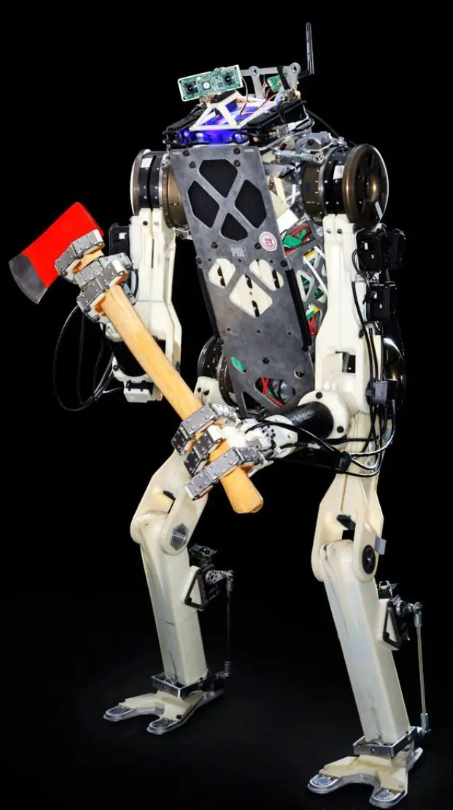
2014年东京大学的石川教授研推出高速双足机器人“Achires”, Achires革新了稳定构造,和人类的跑步方法不同。相比之下,Achires在奔跑时腰部向前倾斜,故意使身体失去平衡,在身体快要倒下时再迈出另一只脚,这与人类奔跑的原理是相同的。
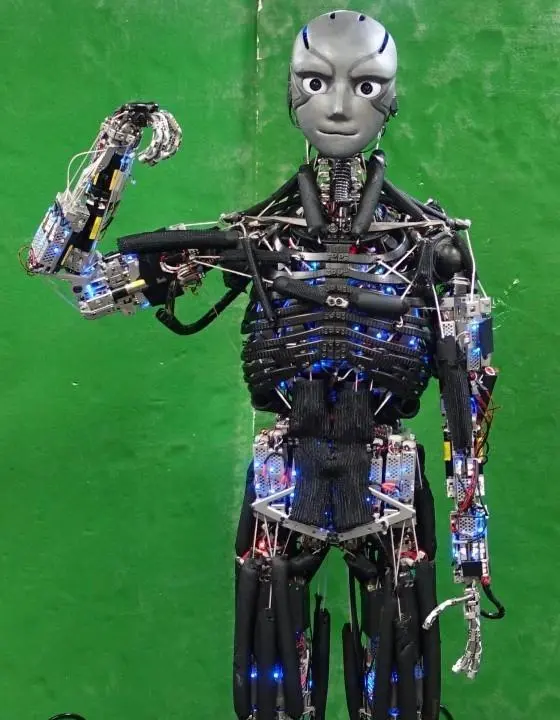
2018年东京大学的研究团队推出“骨格精奇”的机器人Kengoro和Kenshire。这是基于人体系统研发的人形机器人,它们被设计成完全模仿人类的身体比例、骨骼结构、肌肉安排和关节表现,使它们成为有史以来最逼真的人形机器人,这两款机器人全身上下配备了超过108个电机,加上密集的零件,使得散热成为一大问题。研究人员模仿人类汗腺的方式散热,在骨架上使用了布满微小排水孔道的结构,最终实现了水从骨架里自然渗出,然后蒸发散热的方式。
27
韩国科学技术院
2001年起,韩国科学技术院开发了一系列仿人机器人,包括KHR-0/1/2/3、HUBO、HUBO2 Plus和DRC-HUBO等。其中,DRC-HUBO机器人身高170ccm,重量80kg,全身32个自由度,采用轮腿混合行走机构,能够根据不同环境选择不同的移动方式,可以适应碎石块和斜坡等路面。

2023年8月,韩国科学技术院开发了世界上第一个人形机器人飞行员PIBOT,身高160cm,体重65kg,能适应不同的驾驶舱和飞行系统,无需修改飞机结构。即使是在飞机剧烈振动的情况下,它也能通过机械手臂和机械手指灵巧地操作飞行仪器。PIBOT身上配有内外部摄像头,能够实时监控飞机的状态,帮助它管理控制面板上的开关。此外,它利用人工智能和机器人技术来记忆飞行图和应急协议。

28
美国宇航局
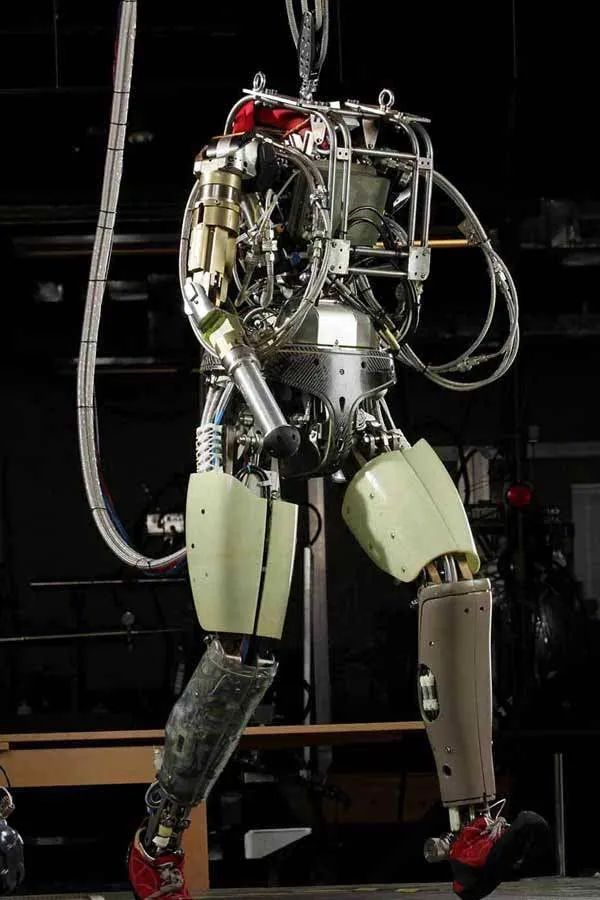
Valkyrie机器人2013年由约翰逊航天中心制造,由美国航空航天局(NASA)资助,身高190cm,体量125kg。其背部配有一个可拆卸电池提供动力,使得其可不受限制自由走动。Valkyrie配备了声纳和激光雷达,头部、手部、腹部和腿部也都有传感器。该机器人能完成爬楼梯、驾车、清理杂物、应对核电站事故、从事太空探索(比如派往火星执行任务)等任务活动。Valkyrie已投入使用,正在澳大利亚进行无人和海上能源设施的远程看守工作。

29
德国慕尼黑工业大学
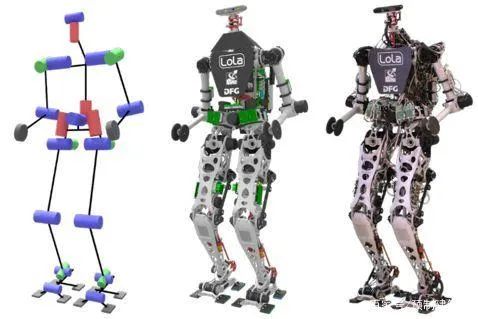
慕尼黑工业大学机械工程系研发了一种能够快速、类似人类自主行走的人形机器人LOLA,他们通过改进视觉感知和步行控制的整合来解决机器人的自主性问题。LOLA身高180cm,重68kg,全身25个自由度,最快步行速度5km/h,26个电动关节,由无刷直流电动机驱动,通过头部传感器可实现避障等功能。
30
意大利技术研究院
意大利技术研究院的团队早在2004年就已经开始了对机器智能的研究,并设计出拥有自我意识的iCub系列机器人。不再是根据特定指令完成特定动作,而是通过对周边环境的探索来获取技能,这是机器人从“听从命令”到“拥有自我意识”的跨越。2012年推出更先进的最新一代iCub 3机器人,iCub 3 高125cm,重52kg,且有54个自由度,各方面性能都远超初代iCub。
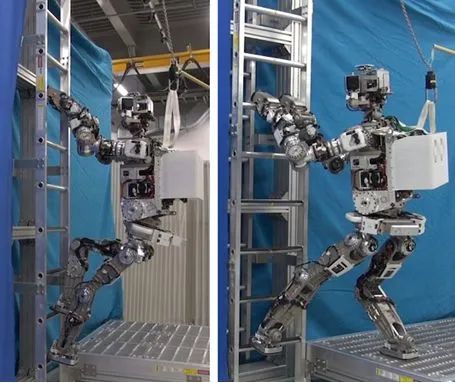
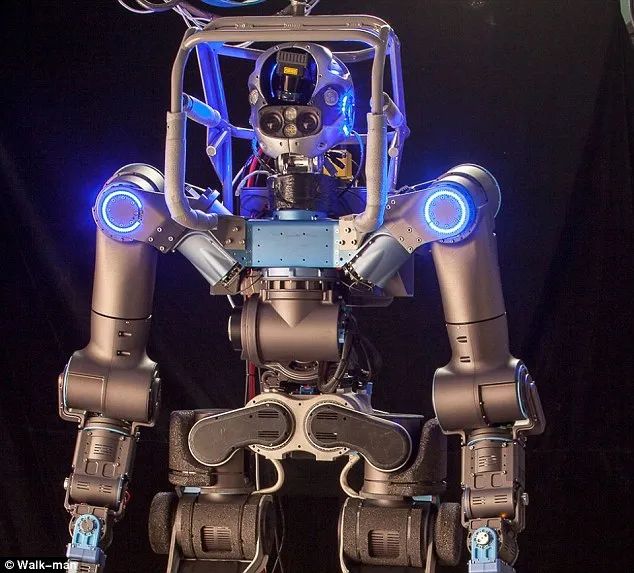
2018年,意大利技术研究院和比萨大学联合发布了人形消防机器人WALK-MAN,重102kg,它头部配备了立体视觉设备、激光扫描仪、3D雷达、麦克风、相机等传感器,能够进行高速计算,行动起来比较灵活。可以走进大楼、找到起火点并取出灭火器,并将现场状况回传给操作员。
31
美国麻省理工学院(MIT)
MIT仿生机器人实验室作为全球最先进的机器人研究中心之一,由韩国教授Sangbae Kim担任主任。
MIT仿生机器人实验室推出的仿生机器人HERMES可以进行重型操纵。该机器人重量只有45kg,但是强壮有力。
为HERMES的关节提供动力的是定制执行器,该执行器包括将无刷直流电机融合到行星齿轮箱,这可以为它们的重量产生大量的扭矩。机器人的肩部和臀部直接驱动,而膝盖和肘部由连接到执行器的金属杆驱动。这使得HERMES比其他仿生机器人更灵活,能够吸收机械冲击而不会使齿轮摔成碎片。
32
美国加州理工学院AMBER实验室
AMBER实验室位于加州理工学院,隶属于机械与土木工程系和控制与动态系统系。AMBER实验室由Aaron Ames教授领导,该实验室打造了专门为高动态机器人系统开发新型非线性控制器,通过混合系统模型以及混合零动力学的应用,实现双足机器人的稳态行走。曾研发一个1.6m高的人形机器人Amber。

33
瑞士苏黎世联邦理工学院
瑞士苏黎世联邦理工学院衍生公司研发的机器人Swiss-Mile,不仅是四足轮腿式机器人,也是个人形机器人。
轮式与腿式相比具有许多显着优势,在进行了算法改良后,机器人可以直接以“人形机器人”的状态站立起来,执行滑行、爬楼梯、下坡等高难度动作,能够更快、更有效地移动,比四足行走要快的多,速度高达6.2m/s,效率比腿式系统高83%。并可携带工具、材料、货物和传感器,最大有效载荷为50kg。

小结
当前以人形机器人为代表的新技术、新产品、新业态蓬勃发展,正成为全球科技创新的制高点、未来产业的新赛道和经济增长的新引擎。在本文中,小编共盘点了33支国外人形机器人团队,这些团队在人形机器人领域有着独特的创新和突破,我们期待看到这些团队在未来加强合作,共同推动人形机器人技术的发展。



