
建筑业对人类生产力至关重要,但需要实质性创新来满足不断增长的需求并减少其对环境的严重影响。建筑业是世界上最大的经济部门之一,占全球国内生产总值的13%。推而广之,它几乎是所有其他行业的重要组成部分:建筑业负责运输和农业基础设施、制造设施、水坝、发电厂和住宅的生产。
面对人口增长和民用基础设施不足,全球住房供应不足是预期建筑需求激增的原因之一,如果没有实质性的技术进步,这种需求不太可能得到满足:在过去二十年中,建筑业的劳动生产率平均每年仅增长1%。相比之下,全球经济为2.8%,制造业为3.6%。
未来几十年还将为该行业带来新的挑战和机遇,例如建立海岸防御以应对气候变化的影响以及需要高效的外星基础设施来支持太空探索。在这些行业挑战中,最关键的挑战是减少行业自身生态足迹的当务之急:建筑业是全球温室气体排放的主要贡献者,主要来自水泥、钢铁、塑料、铝、砖和玻璃等建筑材料的制造。仅水泥(用于混凝土、砌块、砂浆和石膏)就占全球人为一氧化碳的 8% 至 9%2排放量和全球能源的 2% 至 3% 。在其使用寿命结束时,混凝土也是建筑和拆除废物 (CDW) 的主要贡献者:全球 CDW 每年超过 3 亿吨,混凝土占美国对这一数字的 70% 。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.abp9758
机器人技术提供了一个提高建筑业劳动生产率的机会,同时也减轻了众所周知的危险、非结构化和体力消耗的工作环境中随之而来的安全和疲劳问题。除了提高建筑的经济和生产效率外,机器人还通过直接使用本地、低能耗、天然和回收材料作为混凝土的替代品,为减少行业的环境足迹提供了机会。原位资源利用长期以来一直被认为是促进星外建设的必要条件:在太空中,资源稀缺,运输昂贵且能源密集,熟练技工极度匮乏;因此,谨慎的做法是开发能够利用手头资源的自动化系统。面对气候危机和停滞不前的建筑业,这些也是地球共振问题,通过使用超本地材料智能建筑来最大限度地减少能源密集型制造和运输的方法也可以应用于地球上。使用区域采购和最低限度加工的材料(如石头和土壤)进行建筑已被证明可以将建筑结构的碳足迹减少50%以上,但这些方法很难在大规模制造的建筑用品更经济的发达地区采用。

从历史上看,使用本土材料建造建筑是司空见惯的:例如,石砌体在建筑中使用了数千年,但随着廉价的运河和铁路运输的出现,劳动力成本的上升以及工业制造的替代品在建筑工地上需要不太熟练的加工,石砌体就衰落了。 通过为机器人配备在原地使用不规则当地材料的能力,这种可持续的历史建筑实践可以被重新构想为当代建筑背景下经济上可行的替代方案。
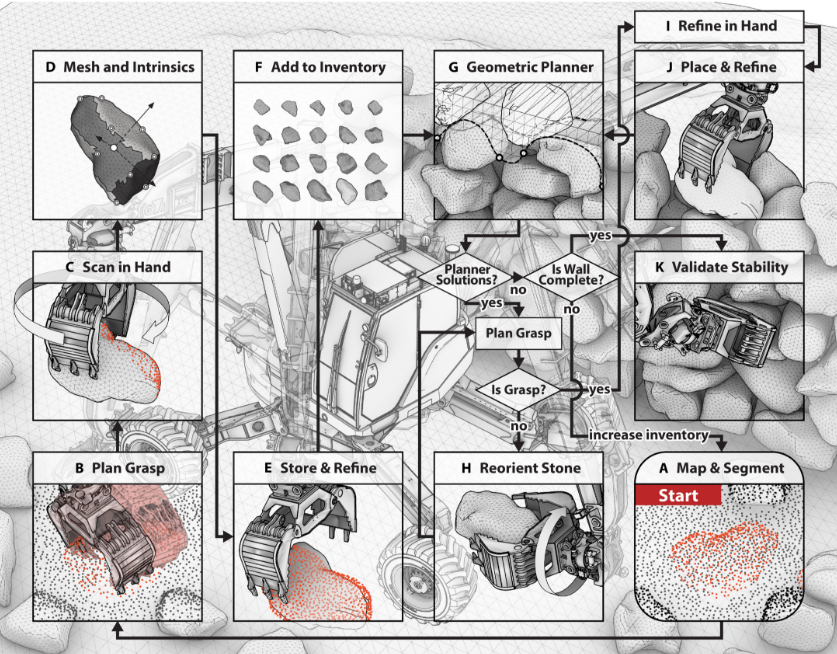
为此,Science Robotics近期发表的工作,展示了一个 12 吨重的机器人挖掘平台,能够使用当地可用的、未经改性的天然和再生材料建造大型石墙和景观。从高度异质的石头中构建任意弯曲和明确定义的壁形状,使用光探测和测距 (LiDAR) 映射、学习图像分割、数字化和操作非结构化环境中的石头实例。

提出了一种在线规划算法,该算法可以确定有限地平线的建筑序列,利用几何属性快速播种候选石材姿势,这些姿势使用扭矩和穿透受限的迭代最近点 (ICP) 配准变体进一步对齐。使用三通道符号距离场 (SDF) 表示对生成的候选放置进行分类,该表示封装了每个独特解决方案周围的局部环境和所需的墙几何形状,并且使用抓取和轨迹计划执行选定的石材放置,该计划考虑了拾取和放置序列两端的碰撞约束。所提出的建筑和景观解决方案在闭环中执行,其中累积的LiDAR地图用于石材建筑中竣工结构的ICP细化,或测量挖掘中所需地形与实际地形之间的位移。这个单一平台提供了处理各种原位颗粒材料的能力,其规模范围从粘土泥到粗砾石。

该项研究工作促进了永久性和高性能干石墙的全面机器人建造,利用多模式工具使用(夹持器和铲子)在单个工地上完成基础设施规模的景观美化和建筑任务。



