
一个电路板、加一个马达,就能搞出一个四足机器人?
当然可以!
俗话说大道至简,真正的高手都善于将复杂的问题简单化,这个机器人就是如此:
不仅制作过程So easy! 还能实现自动爬行和转向。

它的名字叫做CurveQuad,由美国宾夕法尼亚州立大学的研究人员开发,利用弧形折纸的原理,仅用单个马达实现机器人的自我折叠、向前行走、主动调整方向等多种复杂功能!
这种方法大大简化了开发过程,很适合大规模的机器人“套娃”制造!
除此之外,机器人还能群体出动!四个机器人同时从不同的位置和姿势转向,最终聚集在一起。
▍板材+马达,到底是怎么走路的?
如此“极简风”的机器人,到底是怎么走路的?
注意看,机器人底部的矩形板材不断地合拢、展开,板材的四个角在这个过程中充当了机器人的四只脚。
扭来扭去、走起来的样子憨态可掬。
它使用的是一种柔性板材,而弯曲和展开主要依赖于两侧的曲线折痕:

折痕下端是一个围绕其中心旋转的刚性连杆,两边由肌腱连接板材,当连杆旋转时,就会向内拉或向外释放每侧的折痕。
在一定角度下,内折痕形成山折(折痕朝外),外折痕形成谷折(折痕朝内),身体一旦弯曲,机器人就能站起来,连杆继续旋转,质心发生位移,机器人就会整体向左或向右倾斜, 从而也左右脚之间产生差动摩擦。

当连杆振荡时, 机器人的后脚会根据连杆的方向交替滑动和粘住, 从而使机器人在向左或向右转弯的同时向前移动。将连杆旋转回其起始方向,会使机器人展开回其平面状态。

折痕的形状是经过精心设计的,与常用的直线折痕设计相比,曲线折痕的机械性能更强,因为它会引起折叠片材的弯曲并存储,从而使用更少的执行器实现受控、可逆和复杂的运动。
除此之外,折痕的宽度、角度等也很有讲究。比如:外折痕的两端与板材边角之间的空间,其实就是“脚”的大小,这个必须足够宽,才能作用于地面、产生一定的摩擦力。
▍麻雀虽小,五脏俱全
接下来,就要弄清楚机器人是怎么自主运动的。

本质上讲,机器人的爬行其实就是顺时针、逆时针的一对伺服角度之间的交替,通过改变这两个步态参数,就能控制机器人产生不同的运动轨迹和转向。
基于此,研究人员进行了一组实验,对于每种步态进行3次试验,每次试验9个周期,并在OptiTrack运动捕捉系统中测量机器人的结果轨迹。
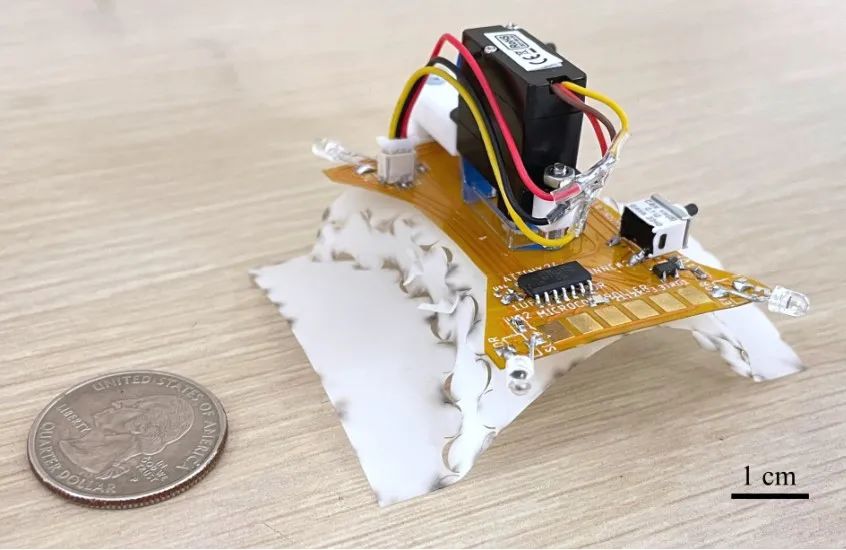
在掌握了机器人最主要的两个变量参数后,研究人员设计了反馈控制系统:机器人通过马达下面的柔性印刷电路板进行控制,麻雀虽小,五脏俱全,一片薄薄的电路板包括:(a)拨动开关,(b)环境光传感器 (c)电阻器,(d)电容器,(e) LED,(F)稳压器,(g)电池, (h)伺服机构,(i)微控制器。
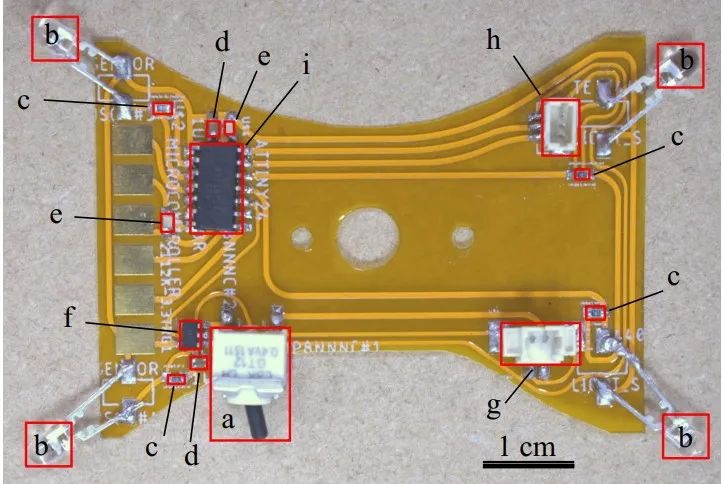
其中,光传感器作为输入来源,微控制器将机器人所需的状态转换为脉宽调制(PWM)信号, 发送给伺服电机。
为了演示机器人的自主行走和转向,研究人员在黑盒子的一侧放置了光源,将机器人分次放置在不同的起始位置和方向上。
实验结果表明,机器人反复转向光源方向,直到它正对光源,然后向前前进。
▍设计简单,可批量生产,还能群体作战
这项研究发表在期IEEE/RSJ 国际智能机器人和系统会议论文集中。美国宾夕法尼亚州立大学的研究人员在2023 年 IEEE/RSJ 国际智能机器人和系统会议 (IROS 2023) 上展示了他们的研究成果,标题为“CurveQuad: A Centimeter-Scale Origami Quadruped that Leverages Curved Creases to Self-Fold and Crawl with One Motor(CurveQuad:厘米级折纸四足动物,利用弯曲折痕通过一个电机进行自折叠和爬行)”
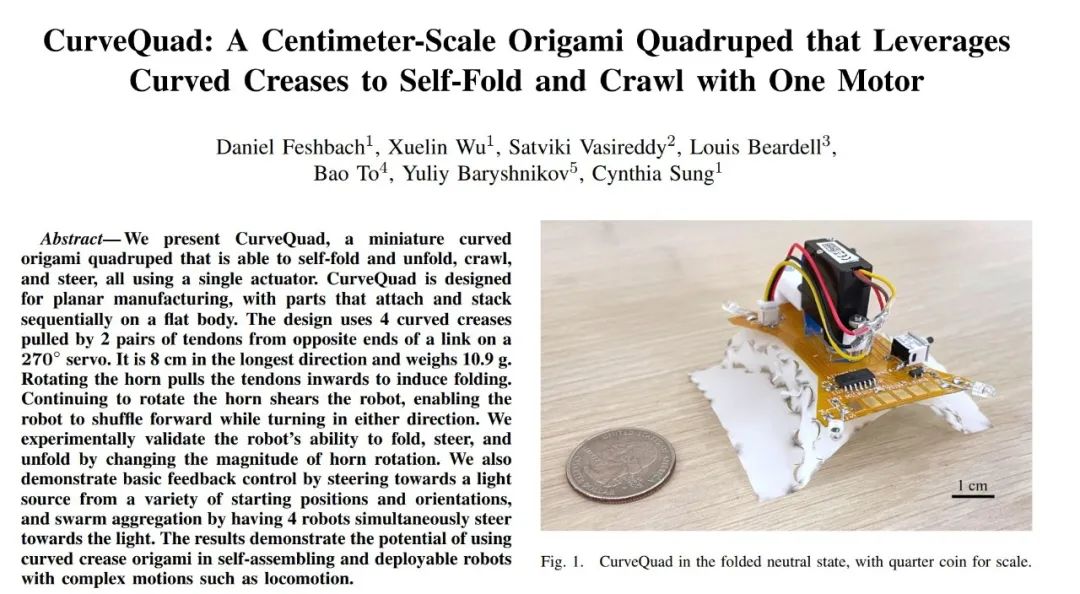
CurveQuad的宽度为80毫米, 重量为10.8克,对于一个基于马达的行走机器人来说,它相当轻巧。
不过说到四足机器人,我们第一个会想到那些拥有酷炫技能的机器狗,能跑、能跳、还能翻跟头。相比之下,这个小小的机器人有什么作用呢?
其实,设计具有复杂功能的机器人需要在多个设计目标之间进行权衡,如爬行步态的复杂性、设计的复杂性、装配的复杂性、机器人的稳健性和功耗等等。这些通常需要在多个自由度上使用执行器来实现复杂的运动步态,这会降低机器人的灵活性并增加尺寸和重量。
而CurveQuad的最大优势就是简单,一个马达、一个电路板、加四条折痕,设计简单、制造简单,制作成本也很低,可以短时间内大规模制造,具有探索杂乱、狭窄空间的能力。
同时,研究人员也展示了CurveQuad群体作战的潜力,他们制作了四个CurveQuad机器人,将其分别放置在不同的位置、方向,结果表明机器人可以转向同一个方向,最终汇聚到一起。
除此之外,这种折纸原理也可以轻易扩展成其他类型的机器人,拥有更多的能力,比如飞行、游泳、跳跃等等。
如果给你一个马达和一个电路板,请打开脑洞,想想还有哪些更有意思的机器人设计?
-



