
与轮式机器人相比,腿式机器人在越障能力、地形适应性、灵活性等各方面更具优势,具有更强环境适应性可应用于复杂场景。
也因此,近年来国内外众多高校、企业纷纷展开对具有高运动性能的腿式机器人的广泛研究,并提出多样腿结构。
近两年,人形机器人商业化概念的提出和各方资本对人形机器人赛道的持续加注更是为腿式机器人领域的研究添了一把“热火”。
不同于当前被普遍研究的人形机器人,来自东京大学信息科学与技术研究生院机械信息学系的研究人员提出了一种平行线驱动腿结构,并开发了并联线驱动单足机器人RAMIEL,其最大跳跃高度可达1.6米,最多可连续跳跃7次!
该机器人设计原理如何?结构构造又是怎样实现?接下来就和机器人大讲堂一起来深入看看吧!
▍提出平行线驱动腿部结构,助力实现连续跳跃和高跳
由于可跳跃腿式机器人可以在更多的三维地形上移动,因此,关于可跳跃腿式机器人的研究一直颇多。
迄今为止,已开发的几种为腿式机器人中单次跳跃的CoG(重心)跳跃高度最高可达3m。
但同时,这种专门从事跳高的机器人为了减轻机器的重量,通常都不会配备姿态控制和调整下一条腿位置所需的执行器,很难实现连续跳跃移动。若在这种机器人中安装用于姿态控制的执行器,机器人的重量将显著增加,其跳跃高度会受到较大影响。
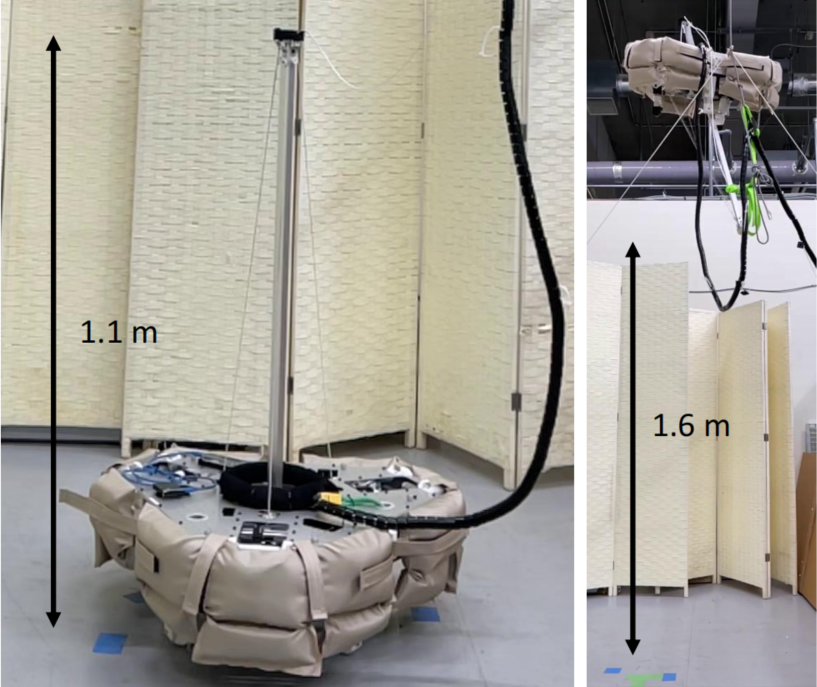
以业界较为知名的单腿跳跃机器人Salto-1P为例,Salto-1P虽通过电动机、串联弹性元件、优化连杆结构等组合实现了连续跳跃和移动,但其CoG跳跃高度大受影响,最大仅为1.1m。
为研究可实现连续跳跃和高跳的腿部结构,该研究团队提出了一种平行线驱动腿部结构,其具有一个线性运动自由度和两个旋转自由度的腿部通过由六根线来实现控制。
 平行钢丝驱动腿概述和1.6m高跳运动快照
平行钢丝驱动腿概述和1.6m高跳运动快照
具体来看:
平行线驱动腿部结构由主体部分和腿部部分组成,腿部部分相对与主体部分具有一个直线运动自由度和两个旋转自由度。腿部的关节由主体延伸的六根电线控制。每根线材钧由独立的电机缠绕,通过调整线材的缠绕长度可实现目标腿部的姿势。
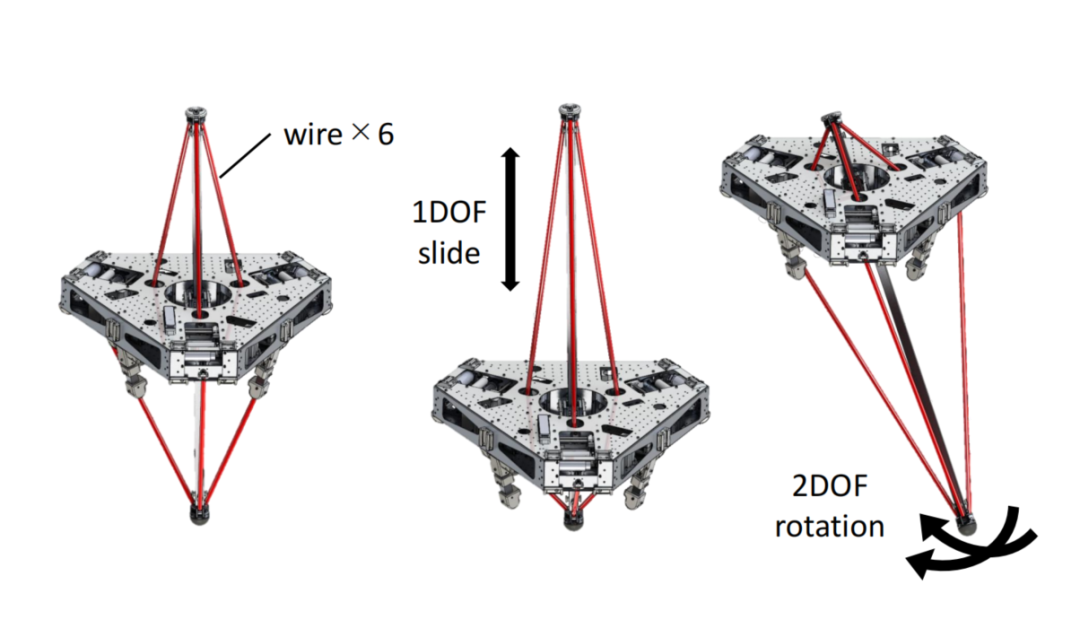
平行线驱动腿的结构
由于腿式机器人无法在空中垂直加速,因此跳跃高度由起飞时的垂直速度确定。研究团队发现,为了让腿式机器人进行跳高并增加机器人的跳跃高度,必须增加机器人起飞时的速度,即必须满足“抬起机器人的力必须很大”“加速距离一定要大”“加速过程中垂直速度不得饱和”三个条件。
在许多腿式机器人采用的类动物旋转关节腿结构中,加速度距离的延长和防止速度饱和二者难以同时实现。通常情况下,在使用旋转关节进行垂直加速的腿部情况下,为了保证加速度足够大,需要在膝盖伸展的情况下起跳,但在旋转关节腿部结构中,膝盖伸展的越多,腿越接近奇点,垂直速度越接近零。因此,为了防止速度饱和,需要在膝盖一定程度的弯曲情况下起跳。这导致使用旋转关节腿结构实现机器人跳跃高度提升难以实现。
但在平行线驱动支腿结构中,实现机器人跳跃更高的三个条件很容易满足。由于使用线性关节进行垂直加速,即使腿部伸展,垂直速度也不会降低,因此,机器人可以以最大范围加速。此外,并联线驱动腿部结构可以通过并联使用三个电机来提升身体,与使用串联执行器的腿部结构相比,并联线驱动腿部的结构可以轻松实现大力抬起机器人。
对于连续跳跃的实现,由于在连续跳跃过程中,机器人需快速移动腿部稳定姿势。如果腿过重,其最大加速度便会变小,且在腿的后坐力作用下,主体的姿势容易受到冲击导致崩溃。因此,团队选择了可使机器人灵活移动腿部且无需任何执行器的轻型腿部——平行线驱动腿部结构。
▍设计并联选驱动单足机器人,验证平行线驱动腿结构跳跃性能
为了验证平行线驱动腿结构的跳跃性能,该研究团队设计并建造了单足机器人RAMIEL(平行线驱动单足敏捷腿)。
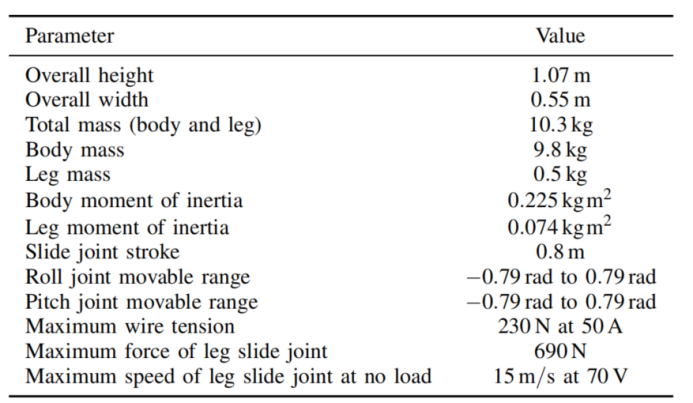
RAMIEL规格表
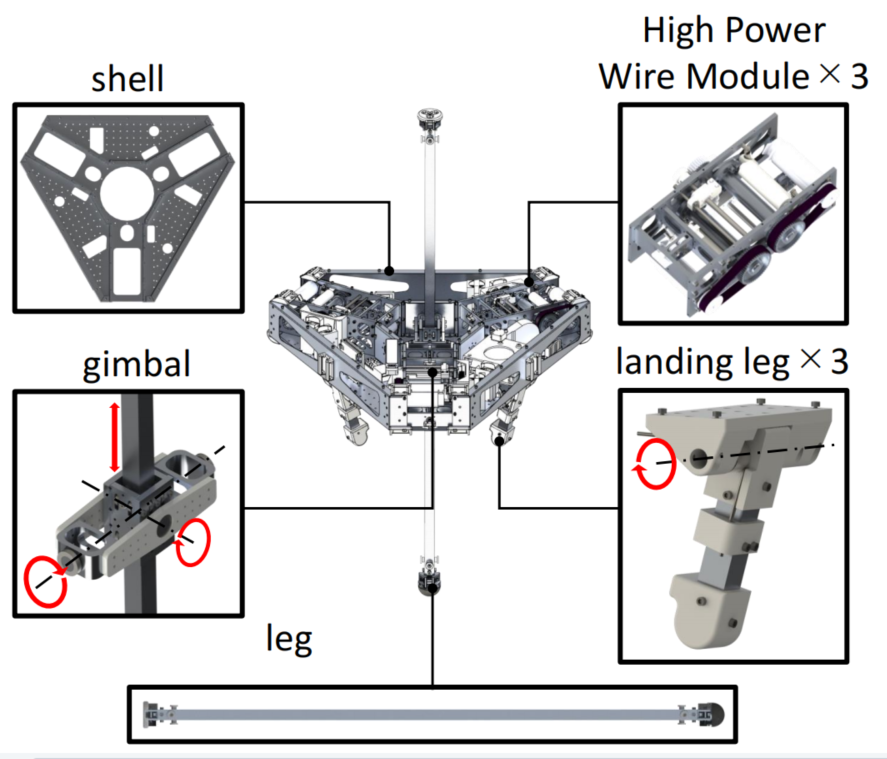
单足机器人RAMIEL结构构成
高1.07m、宽0.55m、重9.8kg的RAMIEL可大致分为两个部分:腿和身体。
为了实现高而连续的跳跃,RAMIEL腿部采用了轻质结构,仅由铝制方形空心管、电线连接部分和用于接地的橡胶组成。该腿结构简单、无需执行器,重量轻且可控。机身部分则由作为框架的外壳、连接机身和腿部的万向节模块、着陆部分组成。
 RAMIEL的详细设计
RAMIEL的详细设计
当RAMIEL身体接触地面时,腿部作为接地点,大功率电线模块控制电线。线模块的外壳采用硬壳式结构,由厚度为1毫米和1.5毫米的铝职称,既轻便又坚固。外壳表面安装有缓冲垫,可以在本体部分侧面和地面接触时保护内容物。
万向节具有一个DoF,分别用于横滚轴和俯仰轴上旋转,以及1个DoF,用于平行于腿部的线性运动。直线运动机构则通过从四面压住腿的方管来实现,轴承安装在万向节内壁上。该云台没有任何执行器或传感器,结构简单且坚固。着陆腿使RAMIEL能够从地面开始跳跃,并在完成跳跃动作后返回着陆状态。着陆腿的底部有一个几乎垂直于地面的旋转自由度。当RAMIEL以一定角度与地面碰撞时,着陆腿会从底座折叠起来吸收冲击力。
RAMIEL大功率线材模块设计
RAMIEL使用六根电线来控制腿部的姿势,并配备三组模块来控制电线的长度。一根线模块独立控制两根线的绕制长度。
为了保障RAMIEL“张力和最大速度足以跳跃”“不会因着陆冲击而被破坏”“能够将电线精确的缠绕到预期长度”,该研究团队开发了一种高功率电线模块来满足这三个要求。
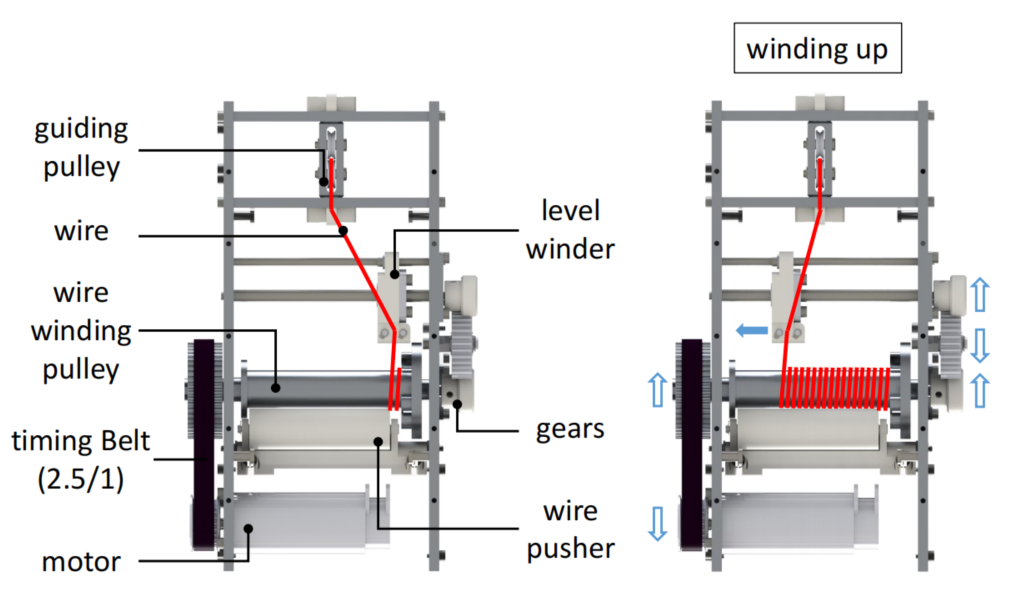
大功率线模块的详细设计
为了保障最大缠绕速度和最大张力,高功率电线模块使用了BLDC电机来满足这一要求。该电机可在输入电压70V和最大瞬时电流50 A的高功率条件下缠绕电线。电机的输出轴经正时皮带轮减速至2.5/1,输入到直径为20毫米的绕线皮带轮上。钢丝最大拉力约为230N(施加50A),将平行线驱动腿部结构近似为简单的线性运动,三根线可以以690 N的总力抬起机器人本体。这意味着RAMIEL可以以六倍重力加速加速度。此外,电机的高输入电压为70V,即使在50A的高电流下,最大绕线速度也能达到10.7 m/sec。
面对跳跃机器人着陆时巨大冲击可能会损坏腿部和执行器的主要问题。研究团队在大功率线材模块中,将电机减速比设置低至2.5/1,并采用准直接驱动来解决这一问题。准直接驱动使绳索在着陆时反向驱动,可减少对腿部和执行器的影响。
RAMIEL腿部姿势控制的实现
机器人连续跳跃时,需将电线精确地缠绕到预定长度。
钢丝直径为2mm,采用zylon芯纱和涤纶侧纱。由于钢丝在最大张力下,其伸长率也仅为1%左右,对卷绕长度影响较小,因为研究团队采用了230N的线模。
在大功率绕线模块中,研究团队采用水平绕线机和推线机来实现精确绕线。来自绕线轮的钢丝经过匀整机到达导向轮。匀整绕线机随绕线轮的旋转在滑动螺杆上作直线运动,起到将绕线轮上的线材对齐的作用。钢丝推动器可防止钢丝在卷绕滑轮上相互交叉,并有助于顺利卷绕。
▍跳高实验+连续跳跃实验,验证RAMIEL优越性能
对于RAMIEL的性能,研究团队进行了跳高实验和连续跳跃实验加以验证。
由于RAMIEL的驱动电机和控制电路电源均通过电缆从外部提供,因此研究团队将RAMIEL延伸出来的电源线悬挂在2m的高度,并在水平地板上进行了测试。
跳 高
研究团队首先进行了跳跃实验,指令CoG跳跃高度为1m。跳跃过程中,RAMIEL的身体从水平地面位置跳跃,跳跃后回到起始位置。
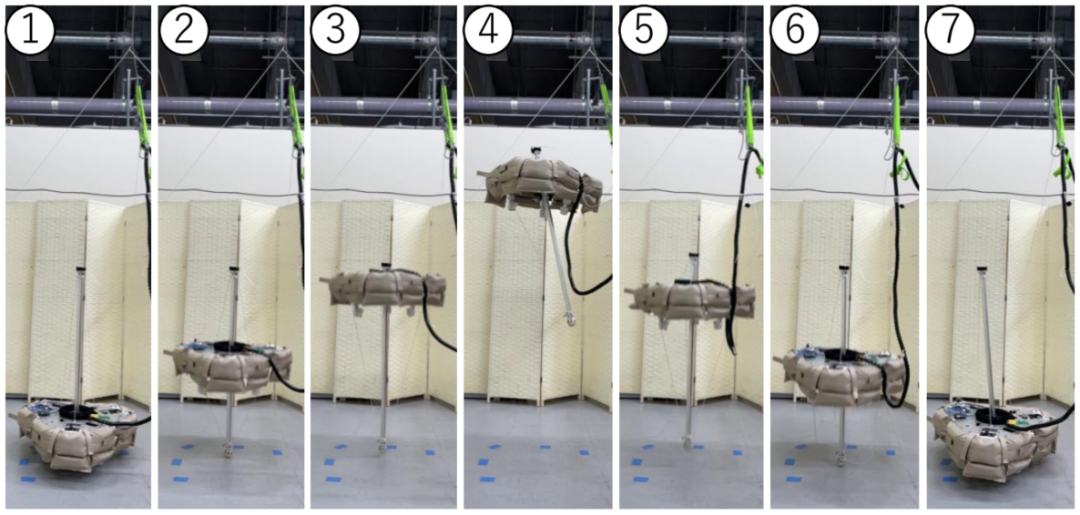
0.7m跳高动作的快照
RAMIEL的重心垂直位移图如下图所示。起飞时,RAMIEL的重心高度为0.9m,最大高度为1.63m,表明RAMIEL的重心垂直位移最大为0.73m。使用运动捕捉来测量指令跳跃高度为1m的跳跃实验中CoG的垂直位移。
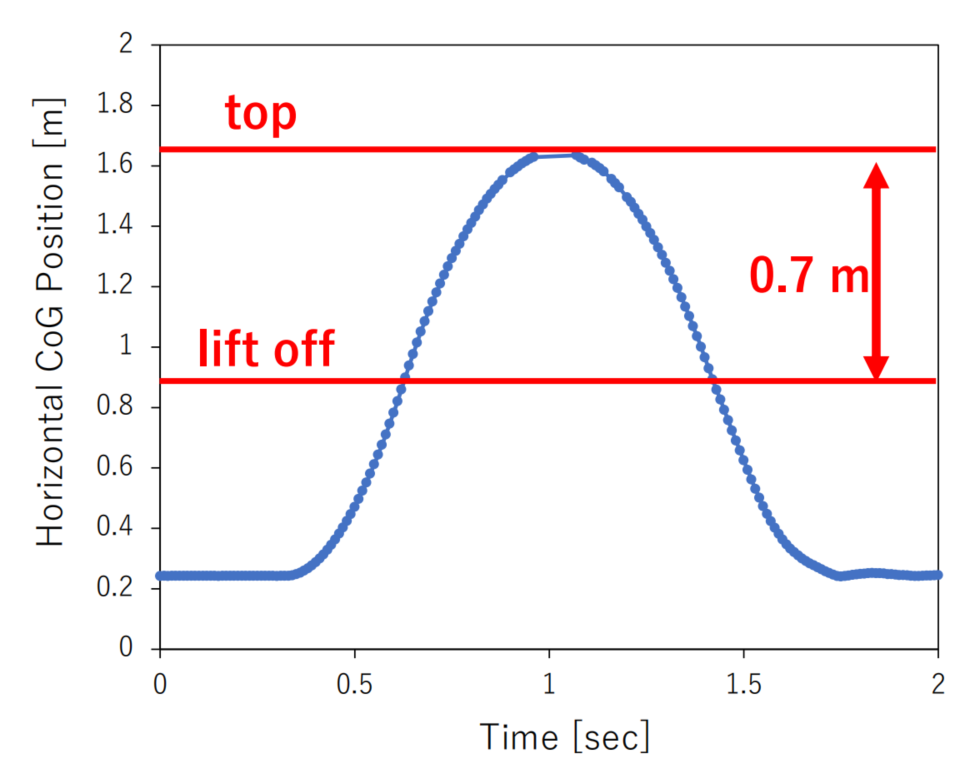
RAMIEL跳跃0.7m高度时重心(CoG)的垂直位置
第二次,研究团队以CoG2m的命令跳跃高度进行跳跃实验。RAMIEL跳跃成功,但落地失败。
1.6m跳高快照
此外,当机器人在空中时,其中一根上部电线断裂,其他电线松动。RAMIEL CoG的垂直位移图如下图所示。由于CoG的垂直位移是使用RAMIEL本体上附着的RealSense T265进行测量,而RAMIEL在跳跃实验中超出了运动捕捉系统的视野跳跃高度2m,因此与使用动作捕捉相比,CoG的高度存在位移。
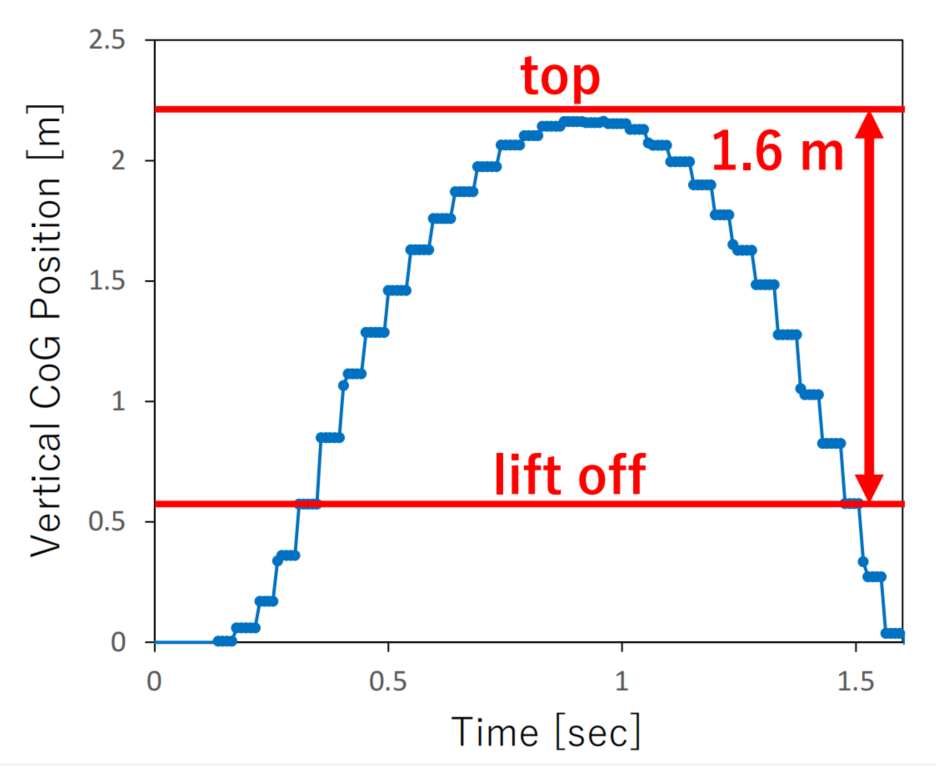
RAMIEL跳跃1.6m高度时重心(CoG)的垂直位置
同时,由于CoG跳跃高度是脚离开地面时的CoG高度与最高点处的CoG高度之间的差值,因此无论CoG的偏移量如何,RealSense和动作捕捉都会测量到相同的CoG跳跃高度高度。RAMIEL起飞时的重心高度为0.57 m,最大高度为2.16m,表明RAMIEL的重心垂直位移最大为1.59 m。
指令CoG跳跃高度2m的实验结果表明,平行线单足机器人能够实现1.6m跳跃所需的力和速度。其高度时现有能够受控连续跳跃的腿部机器人最大CoG跳跃高度的1.45倍。
连续跳跃
在进行连续跳跃实验时,研究团队亦是通过RAMIEL本身安装的RealSense T265来进行测量。
下图为在相同控制参数和环境下进行的16次连续跳跃实验结果。在其中5次实验中,机器人成功连续跳跃超过5次。
 连续跳跃实验结果(腿离开地面的次数就是连续跳跃的次数)
连续跳跃实验结果(腿离开地面的次数就是连续跳跃的次数)
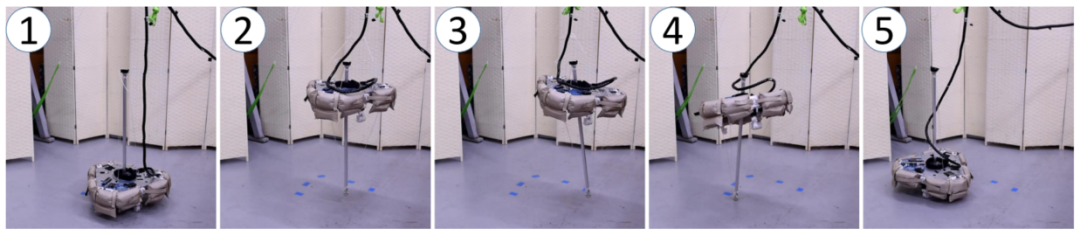
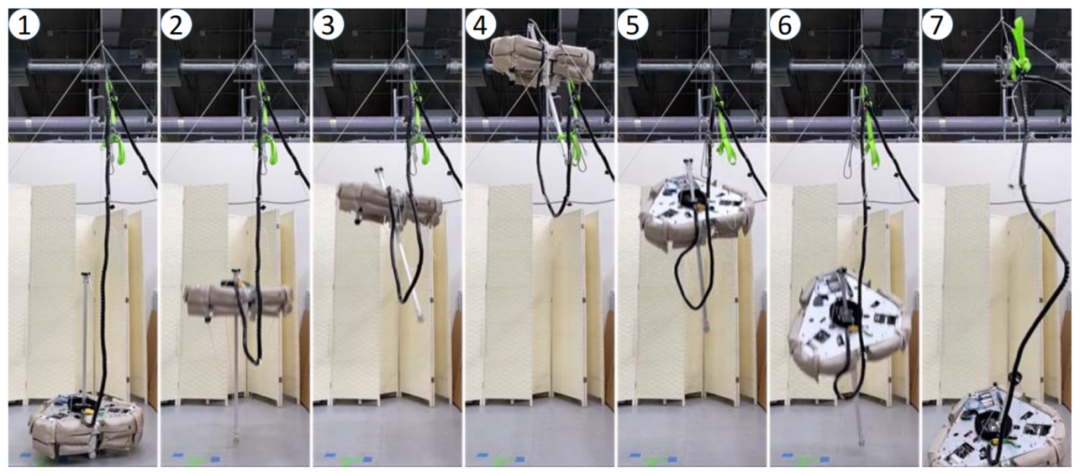
7个连续跳跃动作的快照
实验过程中,RAMIEL的CoG位置如下图所示,从这些图中可以确认,RAMIEL从坐姿连续跳跃了7次,并且落地后恢复坐姿。
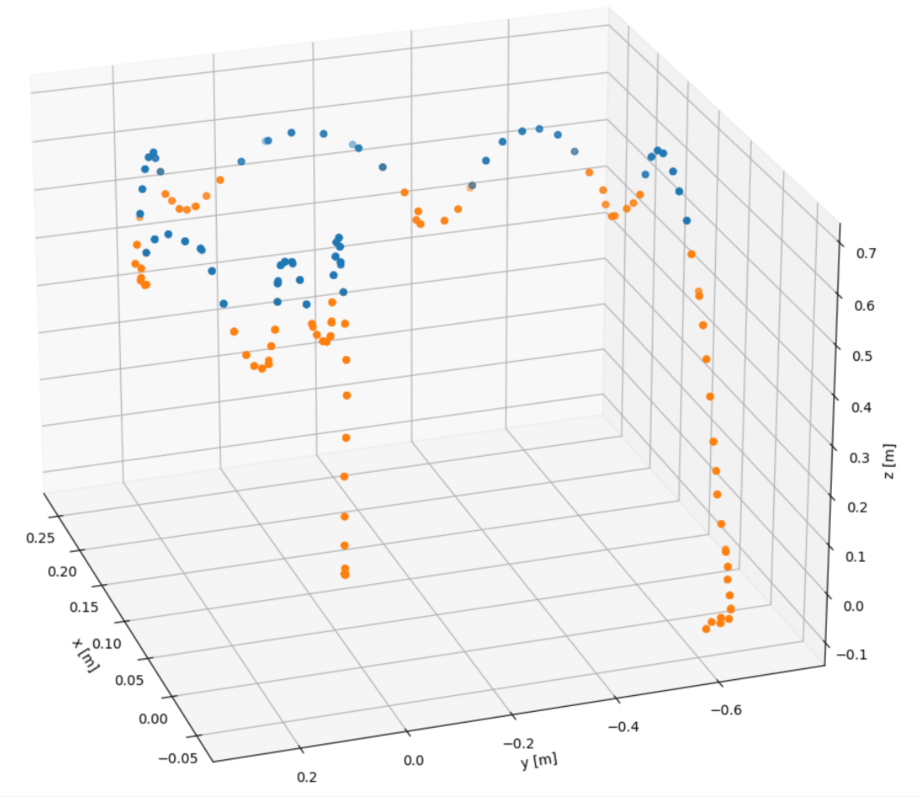
RAMIEL在7次连续跳跃动作中的重心(CoG)位置
(站立阶段以橙色显示,飞行阶段以蓝色显示)
这些实验结果表明平行线驱动腿部结构对连续跳跃所需的腿部具有较高的可控性。
最后,通过一段视频一起来深入了解一下RAMIEL的实验过程吧!
参考文章:http://arxiv.org/abs/2311.04573
-----------------END-------------------



