
在最近的一项研究中,科罗拉多大学博尔德分校的工程师们研发了一种名为mCLARI的变形机器人,该机器人宽度为2厘米,比我们熟知的狼蛛体积还小,但重量却只有狼蛛的二十分之一,仅1克不到,不过mCLARI的变形机器人却可以承载超过其体重三倍的额外有效载荷。

这一创新研究成果是由Paul M. Rady机械工程系的助理教授Kaushik Jayaram和博士生Heiko Kabutz研究团队取得的。他们在2023 IROS大会上获得了安全、安保和救援机器人最佳论文奖。

该论文对之前的微型形状变形机器人CLARI进行了改进,全新的mCLARI变形机器人可在复杂的环境中奔跑,并且能够在不转弯的情况下实现前后左右移动,自行改变身体形状。这项应用将有可能在地震、坍塌等场景下更好地帮助救援团队寻找被困人员。这项研究将软体机器人的适应性与刚性机器人的敏捷性相结合,这一研究成果使得Jayaram团队在实现昆虫机器人领域取得了重要进展。
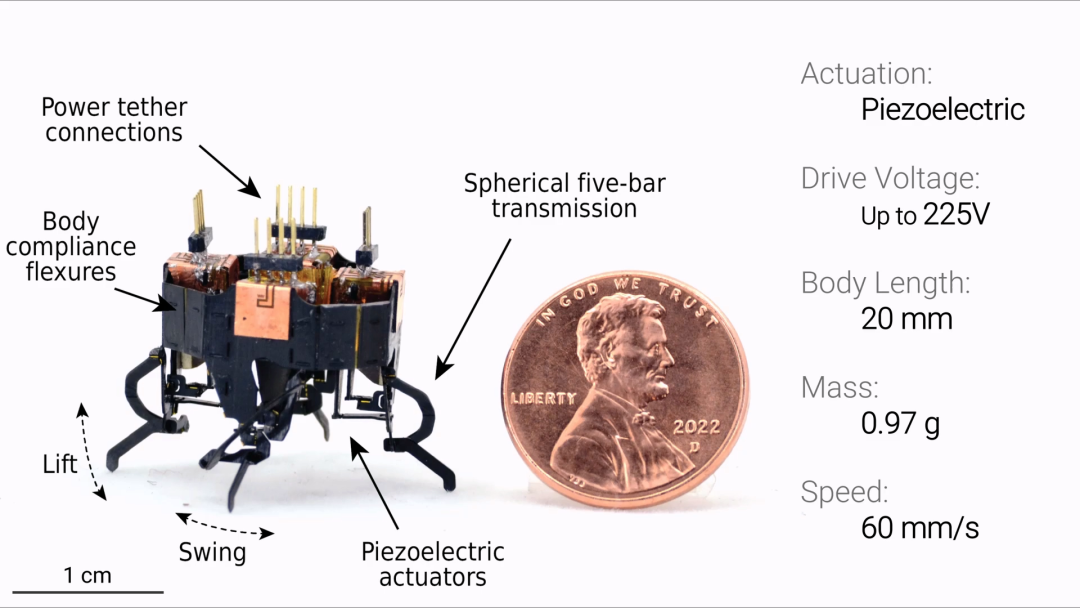
相较于此前发布的CLARI,新版本mCLARI变形机器人在宽度上缩小了60%,重量减轻了38%,但行进的驱动功率依然保持了80%。此外,mCLARI的行进速度是此前的3倍,达到每秒60毫米。
此前Jayaram及其同事研发名为HAMR-Jr的机器人,该机器人基于折纸的设计和层压制造技术实现了小型化方面的这一最新突破。通过这种全新的制造方法,Jayaram和Kabutz在不牺牲机械灵活性的情况下缩小(或放大)了他们的设计,使此类机器人的尺寸更接近现实世界的应用需求。

Kabutz作为这项新研究的主要作者,凭借其灵巧的双手,成功构建和折叠机器人的微小腿部模块。据悉Kabutz在很早以前便对机器人产生了浓厚兴趣,并在高中时期参加了机器人比赛。Kabutz表示:“最初,我对建造大型机器人感兴趣,但当我来到Jayaram's lab,它引发了我对建造类昆虫的仿生机器人的兴趣。”
Kabutz说道:“由于这些机器人可以变形,所以你可以轻松制作体积更大的仿生机器人,更大的尺寸意味着他们可以负载更多的重量,能够搭载更多的传感器,使用寿命和稳定性更好。在实际应用场景下,你可以通过变形来挤过特定的狭小区域,比如对喷气发动机进行例行检查这种工作。”
Jayaram研究团队专注于生物学的研究工作,并将其应用于现实世界工程系统的设计。在Jayaram实验室你可以找到很多包括蟑螂和蜘蛛等仿生形态的机器人。

Jayaram表示:“我们从根本上感兴趣的是了解为什么动物是这样的,为什么它们会这样移动,以及我们如何制造能够满足社会需求的仿生机器人,进而应用在搜索和救援、环境监测当中。”



