
美国波士顿动力机器人
波士顿动力是一家美国机器人公司,成立于1992年,著名产品包含在国防高等研究计划署(DARPA)出资下替美军开发的四足机器人BigDog,以及DI-Guy--一套用于写实人类模拟的软件(COTS)。公司早期曾和美国系统公司(American Systems Co)一同接受来自美国海军航空作战中心训练处(Naval Air Warfare Center Training Systems Division)(NAWCTSD)的一份合约,该合约的内容是要以DI-Guy人物的互动式3D电脑模拟,取代海军飞机弹射任务训练视频。2013年12月13日,波士顿动力公司被Google收购。2017年6月9日软银以不公开的条款收购谷歌母公司Alphabet旗下的波士顿动力公司。现代汽车集团宣布以8.8亿美元的价格收购波士顿动力公司80%的股份,该公司对波士顿动力公司的估值为11亿美元,在这80%的股份中,现代汽车集团会长郑义宣将持有20%,现代汽车及其子公司现代摩比斯、现代Glovis将持有另外60%。此外,软银集团将继续持有波士顿动力公司余下20%的股份。
波士顿动力的创始人马克·莱伯特(Marc Raibert)是典型的学院派创业者,其在麻省理工学院获得博士学位后,在卡耐基·梅隆大学(Carnegie Mellon University)建立了实验室Leg Lab。1986年马克·莱伯特重新回到麻省理工学院,也把Leg Lab实验室搬到了MIT,继续从事机器人的开发和研究工作,并最终于1992年离开MIT,创建了如今的波士顿动力公司,主要开展机器人相关研究工作,其目标是打造像人或动物那样,能够在现实世界中灵活工作的智能机器人。成立至今,吸引了众多来自世界各大院校的顶尖科研人才。
在早期,波士顿动力公司与美国军方合作密切,其研发资金大多来源于美国军方支持,早期的大多数成果多用于美国军队和美国国防高级研究计划局(Defense Advanced Research Projects Agency,简称DARPA),而现在该公司也一直都有美国海陆军、DARPA等军方的合同和赞助。
因此,波士顿动力的许多机器人项目最初都是基于一定的军用背景,设计之初主要考虑军用目的,技术标准和成本都以军用目标为主。
波士顿动力是一家专注于研发动力机器人公司,每一次推出新款机器人时,都能够刷爆我们的朋友圈,可见该公司在世界范围内的影响力有多大。今天我们就来聊聊大名鼎鼎的波士顿动力公司旗下所含有的产品,有些是曾经刷爆我们朋友圈的产品,有些是我们不那么熟悉的机器人,详细信息我们以下一一说明。
1. Spot






参数:身高0.84米,自重30公斤,最大负载14公斤,电池供电,电气驱动,采用3D视觉系统,17个关节点。这是所有机器人中一款最静音的产品,可用于办公室和家庭环境中。由Spot机器人加上5自由度手臂而组成,从而具备了移动抓取物体的功能。传感器系统包括深度相机,立体相机,惯导模块和位置/力传感器,最终实现机器人全自主导航功能。从该结构我们可以看出,该机器人平台配合手臂可以实现一般的物品抓取功能,而且能够开关门等,满足简单的应用。如果需要满足特定行业应用,可能需要重新设计手抓部分和手臂的负载能力。
2. Atlas

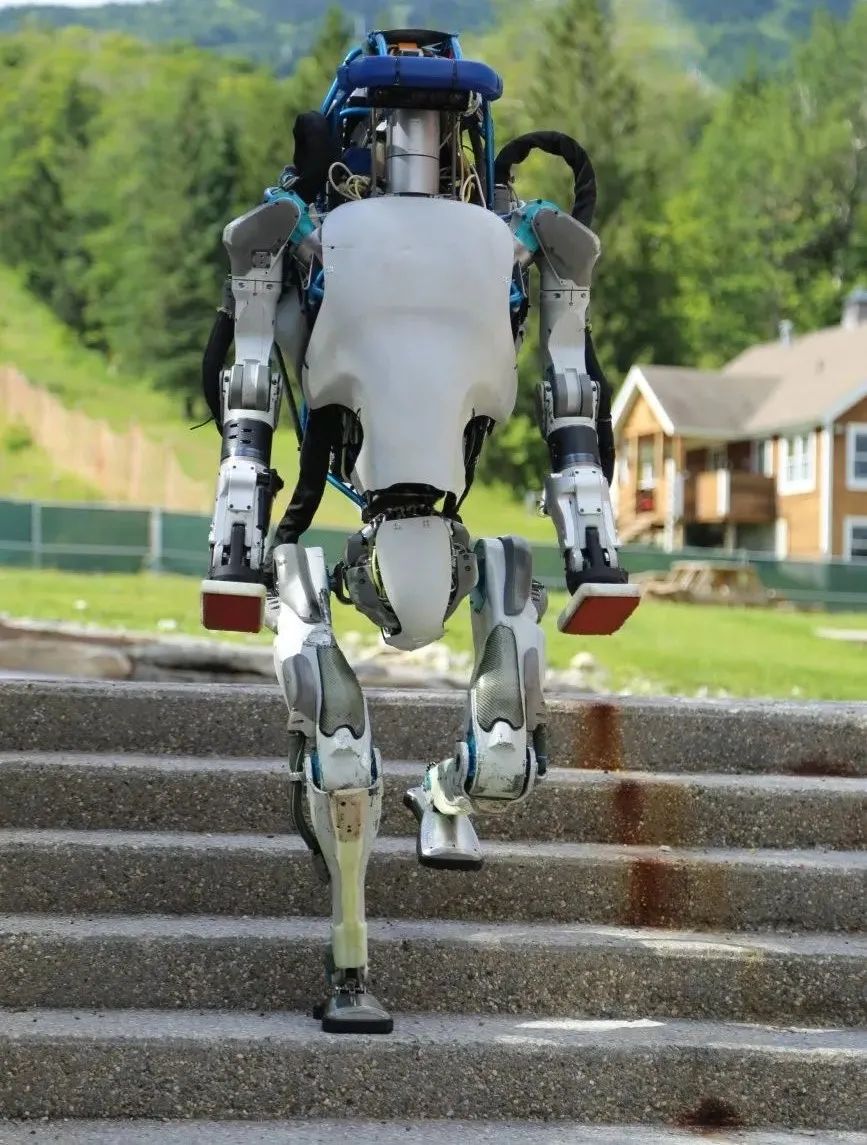
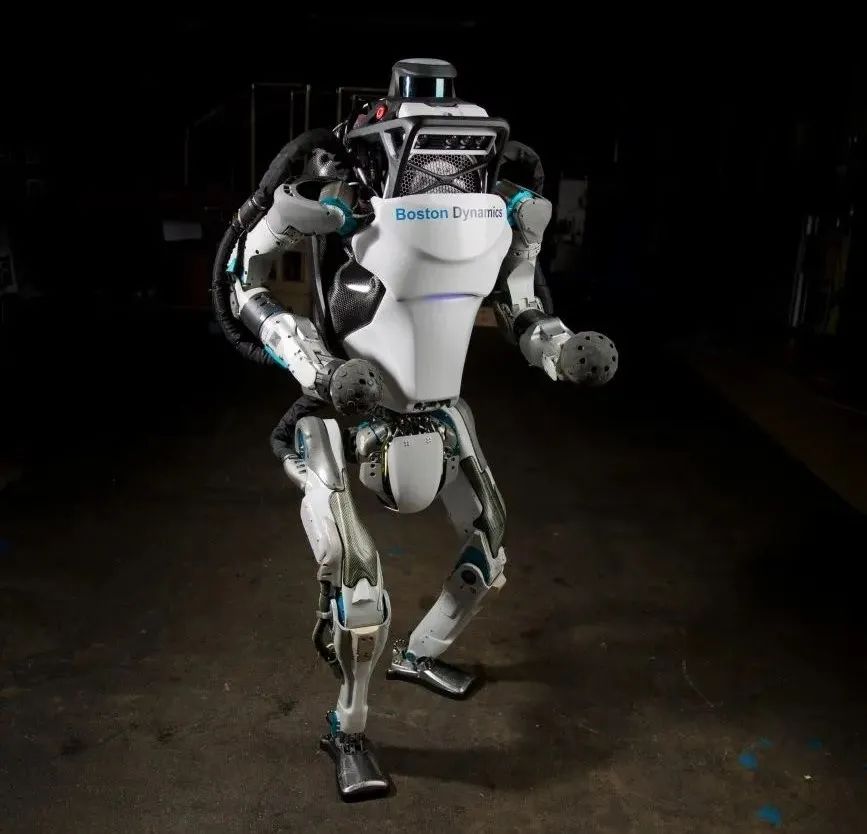
参数:身高1米5,自重75公斤,最大负载11公斤,电池供电,液压驱动,雷达和立体相机系统,28个关节点。
Allas是波士顿公司开发的最新一款人形机器人,控制系统协调手臂、身体和腿的运动,使之行走起来更像人的姿态,能够在有限的空间内完成较为复杂的工作。硬件采用3D打印技术最大化的减少重量和体积,提高了负载自重比。基于立体相机和其他传感器机器人可自主行走于崎岖地形,即使摔倒也能自己爬起来。
该人形机器人具备人的工作特点,那就是在有限空间内可以完成复杂的任务,根据不同任务,搭载对应的传感器即可。比如搭载武器系统,就成了一名士兵;搭载烹饪系统,可能就成了一名优秀的厨师等。如果本体系统足够稳定,未来生活中的很多场景我们都有机会看到他们的身影。
3. HANDLE



参数:身高2米,自重105公斤,最大负载15公斤,电池供电,电气驱动,深度相机,10个关节点。
这是一款由轮子和腿组成的高度灵活的机器人,转为物流场景而设计。只需一台机器人即可实现托盘上取货,堆垛和卸货等一系列工作。
基于运动、动力学和平衡学设计的原理设计,并且具备强大的动力和灵活性,能够帮助人类从辛苦的搬运工作中解决出来,并且无需其他额外的设备配合完成工作。
该机器人可完成仓储环境中代替人类对货物箱子实施抓取并放置到目标点的任务,在设置好任务以后,具备独立完成任务的能力,而无需再搭载其他设备配合,这就大大降低了实现该方案的成本。特别是一些复杂环境下的仓储,自动化设备无法实现时,该机器人的优势将更大明显。起步阶段先甩一下屁股,有点像恐龙,这个有点萌。
4. PICK


宣称是世界第一款用于卸垛场景且具备深度学习能力的机器人。基于人机界面,可以非常方便的配置分拣系统的参数。整合了2D和3D传感器的高分辨率技术优势用于对不同形状的盒子进行定位并运动抓取物体,最大化的降低分拣成本。
这款机器人就是在移动机器人平台上加上一个手臂,手臂末端再添加摄像机,手抓部分由气动吸盘而组成。最大的难度在于相机对抓取物的准确识别,随着经验的积累,识别物的种类和成功率提高后,将有着无限的想象力。
5. Spot Classic



参数:身高0.94米,自重75公斤,最大负载45公斤,电池供电,液压驱动,360°全景雷达,12个关节点。
这是一款专为室内外环境设计的四足机器人,基于早先版本的机器人开发而得来,具备狗的外形和很强的机动性能和稳定性。采用雷达和立体视觉用于感知环境,可以保持自身平衡并在复杂里面实现全自主导航。
该机器人只是一款四足机器人平台,未说明会搭载什么样的应用设备,所以我们也无法得知该机器人的应用场合。从平台做稳定,到落地某个应用场合,还会有很长的路需要走。



