
提到折纸想必大家并不陌生,毕竟谁的童年没有过玩过纸飞机、千纸鹤呢?

当在大部分情况下被当做玩乐的折纸与机器人结合时,又将擦出怎样的火花?
接下来,一起来看中国西湖大学和浙江大学的一个研究团队以折纸艺术为灵感,推出的一种新的模块化机器人设计。
▍基于Kresling折纸图案的通用变形致动模块
由德国数学家 Biruta Kresling 发明,NASA 工程师改行玩法,折纸大师 Robert Lang 设计的Kresling折纸,由一系列沿着相反扭曲方向、角度交替的山形(即突出)和谷形(即凹陷)折叠构成,可用于创建天蛾翅膀上的图案、松果上的螺旋几何形状等自然界中观察到的图案的复杂形状。
西湖大学和浙江大学研究团队受此启发,使用这种特殊的折纸图案创建了一个模块化的、可以适应创建不同形状的通用驱动模块,并将该成果的相关研究论文发表在了《自然通讯》杂志上。

以Kresling折纸为代表的一种独特的结构设计方法,在致动方面具有高变形比,多稳定和操纵刚度的特点,但同时现有的基于折纸的致动器也受到有限的多度影响。由原始折纸图案产生的自由运动,解耦的通用变形模式很少在单个驱动模块中得到证明,这严重削弱了灵巧操纵和运动的潜力。因此,该研究团队在Kresling折纸图案的基础上进行了重新设计。
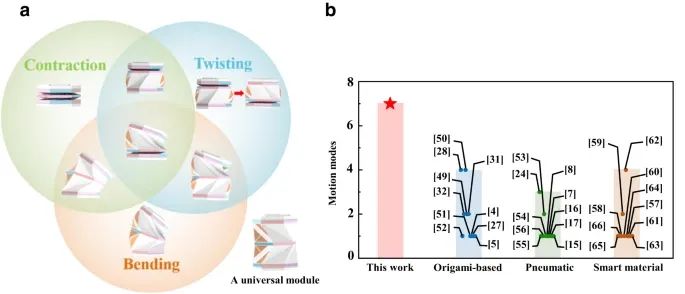
a通用驱动模块由 Kresling 折纸图案和充气单元的适当组合组成。该模块通过气动驱动表现出收缩/伸展、弯曲、扭曲以及这些运动模式的任意组合。b本模块与现有折纸模块的运动模式比较4 , 5 , 27 , 28 , 31 , 32 , 49 , 50 , 51 , 52 , 气动7 , 8 , 15 , 16 , 17 , 24 ,53、54、55、56 ,以及智能材料致动器57、58、59、60、61、62、63、64、65、66 。
为丰富受Kresling折纸图案的运动多功能性,改变现有设计受Kresling折纸图案几何特征的强烈约束,在气动致动或磁场致动下会产生整体变形弯曲的情况。在利用气密室和折痕、构建基于Kresling折纸图案形成的主室的基础上,该研究团队还增加了AC和CE两条对角折痕,并在ABCD四顶点单元上增加了可单独操纵的驱动袋,形成具有放气和充气两种状态的充气单元。
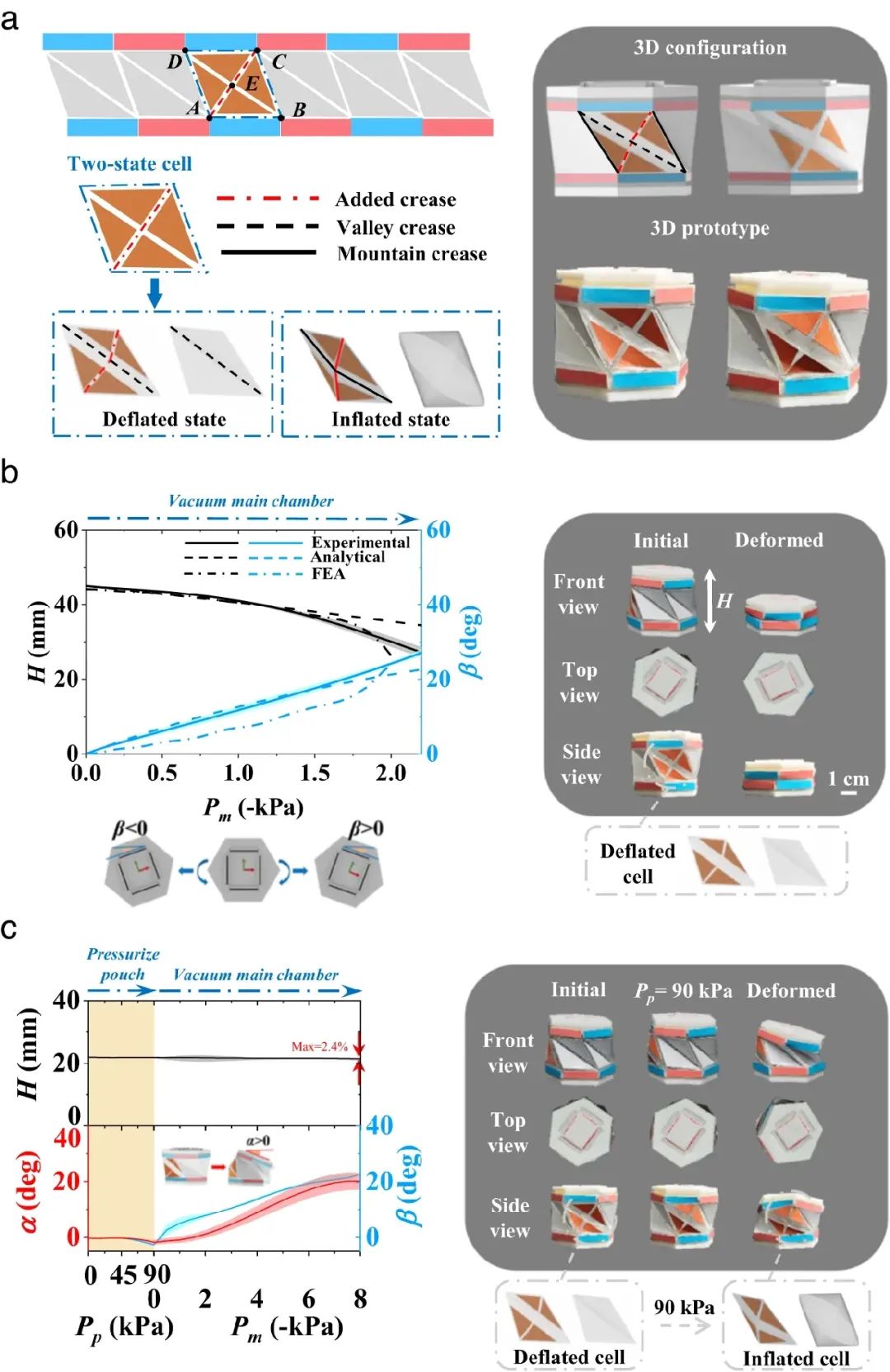
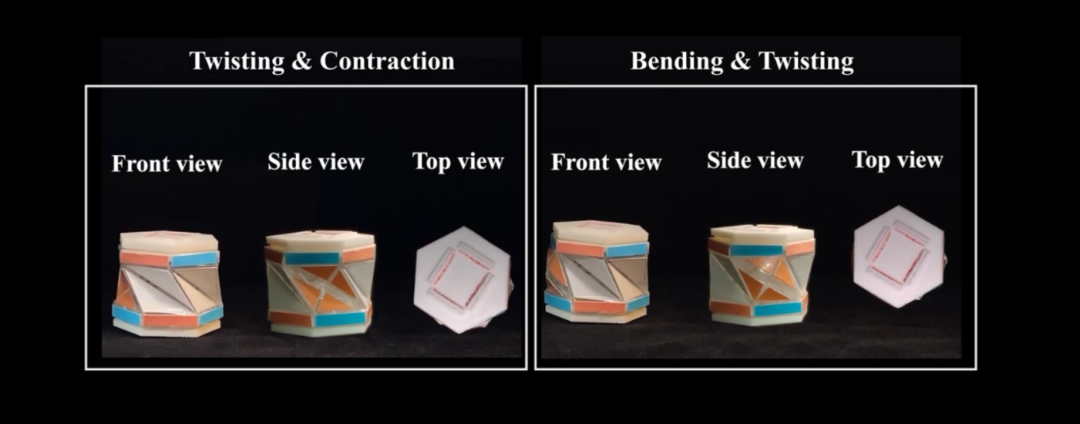
a将侧袋融入气密 Kresling 图案中。b当侧袋放气且主室抽真空时,耦合扭转和收缩运动。上盖顺时针扭转时的扭转角度。c当侧袋充气且主室抽真空时,耦合弯曲和扭转运动。上盖逆时针弯曲时的弯曲角度阴影区域代表 1 个标准差;实线代表平均值。β>0β< 0α>0
其放气状态对应原始的Kresling模式,充气状态则引入了新的约束,打破了Kresling模式的能量有利变形模式(即耦合扭曲和收缩),添加了弯曲模式,可通过单个折纸模块实现弯曲、扭转、收缩/伸展三种解耦的基本运动类型,以及这些基本运动的四种重新组合,总计七种不同运动模式。
同时,由于该通用可变形驱动模块由气动装置驱动,主要依靠气体或压缩空气来产生不同的运动,因此可以通过改变对侧袋和主室的加压方式来实现不同的变形模式,产生满足特定应用场景需求的各种形状。
▍串联多个折纸模块实现复杂动作
得益于模块化的设计,该折纸模块也具备了即插即用的特性,除了单个使用,还可以实现串联等多样化玩法。通过串联多个模块实现结构重构,折纸模块可以拥有更复杂的运动和更好的操纵能力。
以使用三个折纸模块串联组成的机械臂为例。通过为机械臂远端固定真空驱动夹具,端盖连接两个驱动模块,形成负压主腔和正压侧袋启动通道。在气压装置驱动下机械臂可进行拿起一杯水并将水倒在目标上,也可以在空气中和水下环境实现复杂的运动模式。
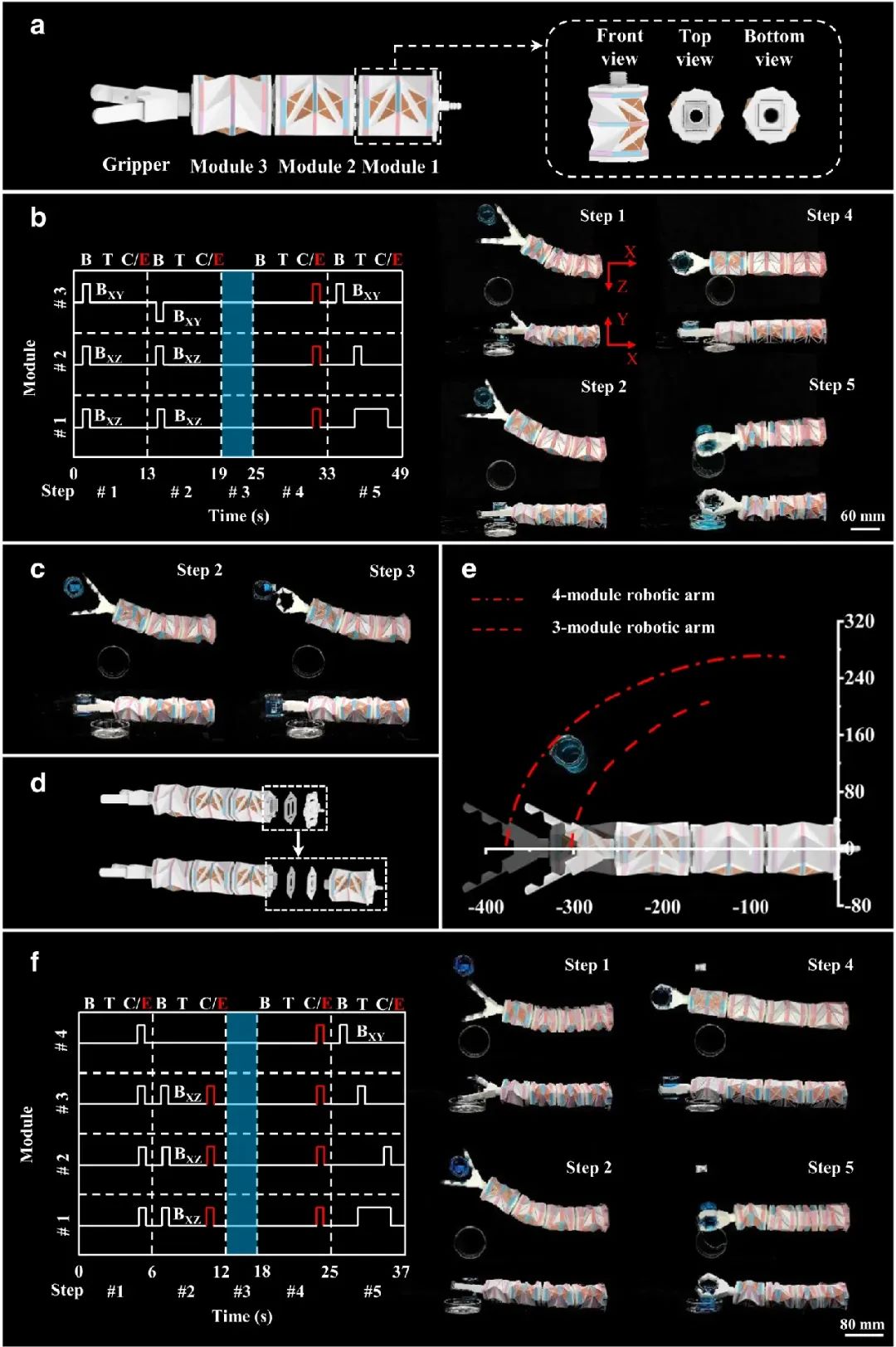
a三模块机械臂和一个模块的示意图。三模块机械臂由三个模块和一个夹具(真空驱动)组成。b从俯视图和前视图看三模块机械臂的运动模式图以及三模块机械臂抓盖和倒水的实验结果。c当盖子移离三模块机械臂的工作边界时,机械臂无法到达盖子的示意图。d三模块机械臂变为四模块机械臂的过程。e三模块/四模块机械臂的部分工作边界。F从俯视图和前视图看四模块机械臂的运动模式图以及四模块机械臂抓盖和倒水的实验结果。b和f中的阴影区域表示软夹具的抓取过程。C/E中的C和E分别代表收缩和伸长。
当长度不够时,还可以通过插入新模块形成四节甚至多节机械臂,沿长长度来扩大工作空间。这个具有通用变形模式的折纸模块可以在不同的场景中实现许多应用,也为软机器人执行复杂任务提供了前所未有的机会。
令人感到不可思议的是,该研究团队研制此模块的初衷源于开发一种在虚拟现实和增强现实中进行交互的新方式。此前,该研究团队正在开发一种新的虚拟现实和增强现实交互方式,但目前仍停留在 VR AR 设备在音频感官知觉中提供视觉上的立体视觉效果,它们无法在机械领域提供具体的感官维度,即触觉。
于是研究团队创造性地开发了此模块,试图通过改变弯曲面板之间的角度,让用户可以主动体验触摸具有各种刚度感知的物体,刺激用户的生理和心理反应,为用户提供高度沉浸的虚拟体验。
未来这一通用变形驱动模块将在元宇宙世界发挥怎样的作用?又会为机器人行业带来哪些改变?机器人大讲堂将持续关注该团队研究动态为大家及时报道。



